ROS(URDF机器人建模)
新建功能包mbot_description

在功能包下新建文件config,launch,meshes,urdf。
在launch文件夹下新建文件display_mbot_base_urdf.launch
<launch>
<param name = "robot_description" textfile = "$(find mbot_description)/urdf/mbot_base.urdf"/> <!-- 设置GUI参数,显示关节控制插件 -->
<param name="use_gui" value="true"/> <!-- 运行joint_state_publisher节点,发布机器人的关节状态 -->
<node name="joint_state_publisher" pkg="joint_state_publisher" type="joint_state_publisher" /> <!-- 运行robot_state_publisher节点,发布tf -->
<node name="robot_state_publisher" pkg="robot_state_publisher" type="state_publisher" /> <!-- 运行rviz可视化界面 -->
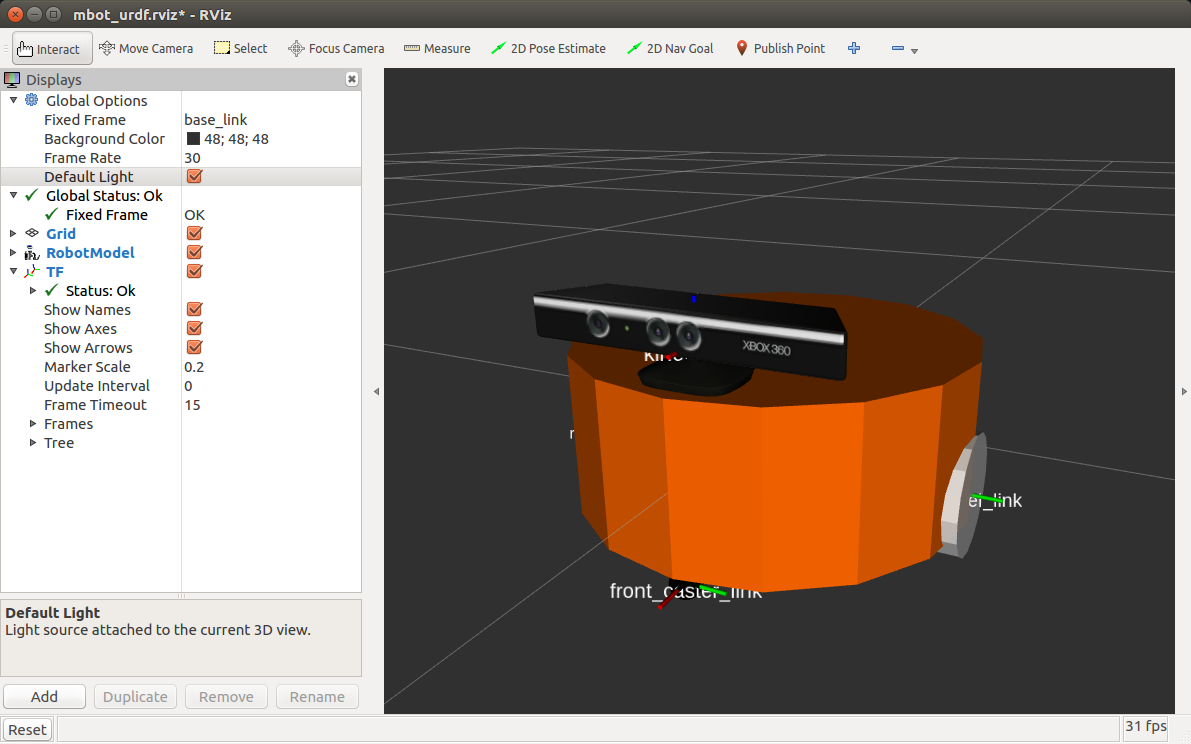
<node name="rviz" pkg="rviz" type="rviz" args="-d $(find mbot_description)/config/mbot_urdf.rviz" required="true" />
</launch>

在urdf文件夹中新建文件mbot_base.urdf
<?xml version="1.0" ?>
<robot name="mbot"> <link name="base_link">
<visual>
<origin xyz=" 0 0 0" rpy="0 0 0" />
<geometry>
<cylinder length="0.16" radius="0.20"/>
</geometry>
<material name="yellow">
<color rgba="1 0.4 0 1"/>
</material>
</visual>
</link> <joint name="left_wheel_joint" type="continuous">
<origin xyz="0 0.19 -0.05" rpy="0 0 0"/>
<parent link="base_link"/>
<child link="left_wheel_link"/>
<axis xyz="0 1 0"/>
</joint> <link name="left_wheel_link">
<visual>
<origin xyz="0 0 0" rpy="1.5707 0 0" />
<geometry>
<cylinder radius="0.06" length = "0.025"/>
</geometry>
<material name="white">
<color rgba="1 1 1 0.9"/>
</material>
</visual>
</link> <joint name="right_wheel_joint" type="continuous">
<origin xyz="0 -0.19 -0.05" rpy="0 0 0"/>
<parent link="base_link"/>
<child link="right_wheel_link"/>
<axis xyz="0 1 0"/>
</joint> <link name="right_wheel_link">
<visual>
<origin xyz="0 0 0" rpy="1.5707 0 0" />
<geometry>
<cylinder radius="0.06" length = "0.025"/>
</geometry>
<material name="white">
<color rgba="1 1 1 0.9"/>
</material>
</visual>
</link> <joint name="front_caster_joint" type="continuous">
<origin xyz="0.18 0 -0.095" rpy="0 0 0"/>
<parent link="base_link"/>
<child link="front_caster_link"/>
<axis xyz="0 1 0"/>
</joint> <link name="front_caster_link">
<visual>
<origin xyz="0 0 0" rpy="0 0 0"/>
<geometry>
<sphere radius="0.015" />
</geometry>
<material name="black">
<color rgba="0 0 0 0.95"/>
</material>
</visual>
</link> <joint name="back_caster_joint" type="continuous">
<origin xyz="-0.18 0 -0.095" rpy="0 0 0"/>
<parent link="base_link"/>
<child link="back_caster_link"/>
<axis xyz="0 1 0"/>
</joint> <link name="back_caster_link">
<visual>
<origin xyz="0 0 0" rpy="0 0 0"/>
<geometry>
<sphere radius="0.015" />
</geometry>
<material name="black">
<color rgba="0 0 0 0.95"/>
</material>
</visual>
</link> <link name="kinect_link">
<visual>
<origin xyz="0 0 0" rpy="0 0 1.5708"/>
<geometry>
<mesh filename="package://mbot_description/meshes/kinect.dae" />
</geometry>
</visual>
</link> <joint name="laser_joint" type="fixed">
<origin xyz="0.15 0 0.11" rpy="0 0 0"/>
<parent link="base_link"/>
<child link="kinect_link"/>
</joint> </robot>
在meshes文件夹下有文件

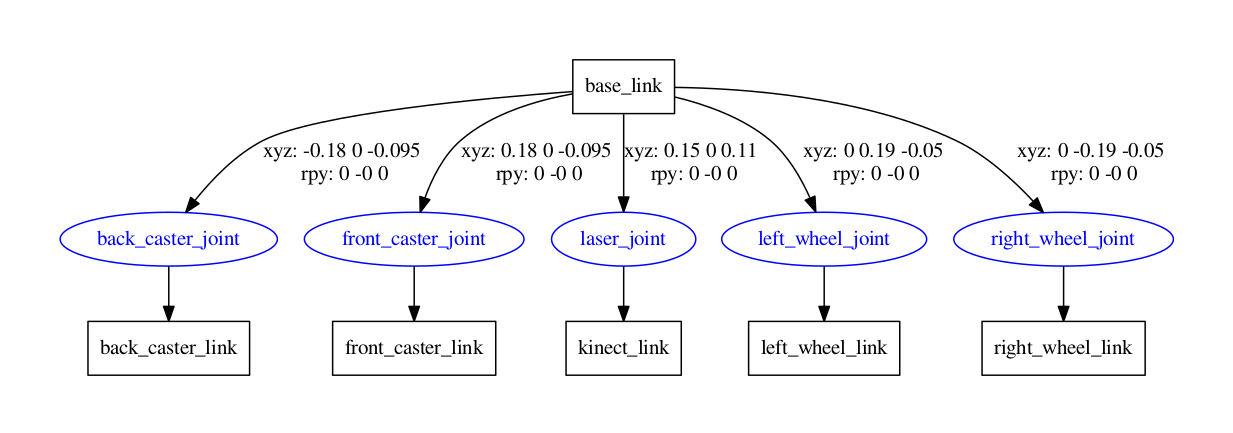
通过urdf_to_graphiz命令查看URDF模型结构:
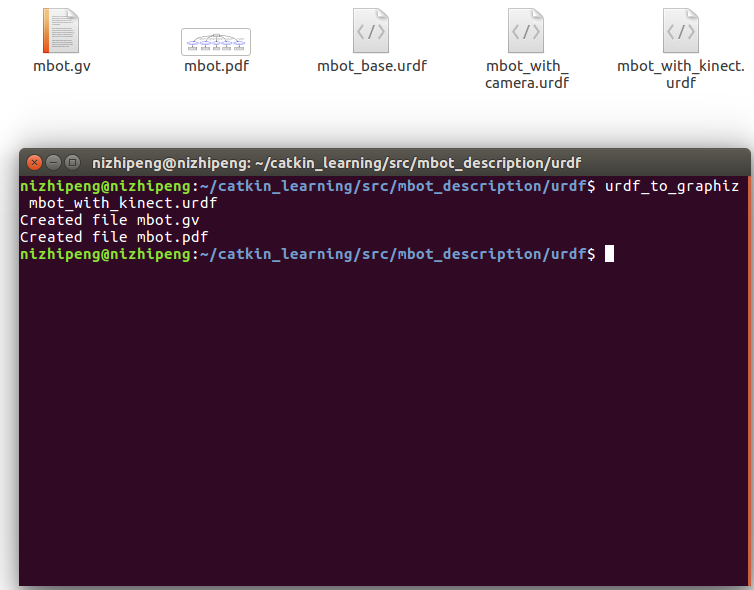
生成PDF
ROS(URDF机器人建模)的更多相关文章
- ROS中3D机器人建模(一)
一,机器人建模的ROS软件包 *urdf : 机器人建模最重要的ros软件包是urdf软件包.这个软件包包含一个用于统一机器人描述格式(URDF)的C++解析器,它是一个表示机器人模型的XML文件,还 ...
- 快速了解 Robot Operating System(ROS) 机器人操作系统
http://www.ros.org/ 关于ROS About ROS http://www.ros.org/about-ros/ 机器人操作系统(ROS)是用于编写机器人软件的灵活框架.目的在简化 ...
- ROS_Kinetic_07 ROS中机器人三维物理引擎高保真仿真利器gazebo 7.0
ROS_Kinetic_07 ROS中机器人三维物理引擎高保真仿真利器gazebo 7.0 ROS kinetic中的gazebo版本是7.0,有很多新的特性. 首先,启动gazebo: ~$ gaz ...
- ROS(indigo)机器人操作系统学习有趣丰富的Gazebo仿真示例evarobot
一直在寻找一个示例可以将ROS学习中常用的基础内容大部分都包含进去,最好还包括Gazebo仿真, 这样即使没有硬件设备,也可以很好的学习ROS相关内容,但又必须有对应的硬件,便于后续研究. 这里,介绍 ...
- ROS(indigo)机器人操作系统学习资料和常用功能包汇总整理(ubuntu14.04LTS)
ROS(indigo)机器人操作系统学习资料和常用功能包汇总整理(ubuntu14.04LTS) 1. 网站资源: ROSwiki官网:http://wiki.ros.org/cn GitHub ...
- 除了ROS, 机器人定位导航还有其他方案吗?
利用ROS进行机器人开发,我想大多数企业是想借助ROS实现机器人的导航.定位与路径规划,它的出现大大降低了机器人领域的开发门槛,开发者无需向前人一样走众多弯路,掌握多种知识才能开始实现机器人设计的梦想 ...
- 除了ROS ,机器人自主定位导航还能怎么做?
博客转载自:https://www.leiphone.com/news/201609/10QD7yp7JFV9H9Ni.html 雷锋网(公众号:雷锋网)按:本文作者科技剪刀手,思岚科技技术顾问. 随 ...
- ROS中3D机器人建模(五)
一.创建一个差速驱动移动机器人模型 前面我们已经创建了一个7-DOF机械臂机器人模型,接下来我们将创建一个差速机器人模型,差速轮式机器人在机器人底盘的两端安装两个轮子, 整个底盘由一个或两个脚轮支撑. ...
- ROS中3D机器人建模(四)
一.创建一个7-DOF机械臂机器人 创建一个名为seven_dof_arm.xacro的文件,写入相应的代码,其关节名称如下: bottom_joint shoulder_pan_joint shou ...
随机推荐
- C#预编译的问题
C#预编译宏并不像C++那样编译之后就不存在了.在UNITY的C#脚本中 #if UNITY_ANDROID && !UNITY_EDITOR AndroidJavaClass jc ...
- ELK Stack 5.2.2 安装文档
简介: ELK Stack 安装文档,这次都使用最新版本(5.2.2).RPM 包的方式搭建 ELK Stack. 下载地址: https://artifacts.elastic.co/downloa ...
- linux 使用systemctl 启动服务报错: Error: No space left on device
By default, Linux only allocates 8192 watches for inotify, which is ridiculously low. And when it ru ...
- Linux-CentOS 更新Firefox版本
1.用你本地的旧版 firefox,访问http://www.firefox.com.cn,下载Linux版本的Firefox. 2.进入存放下载文件(Firefox-latest-x86_64.ta ...
- Attribute与元数据
在MSDN中,Attribute被定义为“是被指定给某一声明的一则附加的声明性信息”. 我们可以通过Attribute来定义设计层面的信息以及运行时(run-time)信息,也可以利用Attribut ...
- 基于 Web 的远程 Terminal 模拟器安装使用详解
http://lzw.me/a/shellinabox.html 一.Shellinabox 简介 Shellinabox 是一个基于 web 的终端模拟器,采用 C 语言编写,使用 Ajax 与后端 ...
- ie11的仿真模式
1>在ie11的仿真模式中,所有版本的按钮都失效,解决方法:再ie的配置中,选项-高级-重置,然后重启ie11 程序员的基础教程:菜鸟程序员
- Golang之Struct(二叉树定义)
接招吧,看代码: package main import "fmt" //二叉树结构体 //如果每个节点有两个指针,分别用来指向左子树和右子树,我们把这样的结构叫做二叉树 type ...
- springboot2.0整合jpa
在整合的遇到各种坑,以下是我整合的流程 1.pom.xml文件 <dependencies> <dependency> <groupId>org.springfra ...
- [Selenium]计算坐标进行拖拽,重写dragAndDropOffset
//@author jzhang6 public void dragAndDropOffset(WebDriver driver,WebElement dragableEl, WebElement d ...