opencv —— HoughLines、HoughLinesP 霍夫线变换原理(标准霍夫线变换、多尺度霍夫线变换、累积概率霍夫线变换)及直线检测
霍夫线变换的原理
- 一条直线在图像二维空间可由两个变量表示,有以下两种情况:
① 在笛卡尔坐标系中:可由参数斜率和截距(k,b)表示。
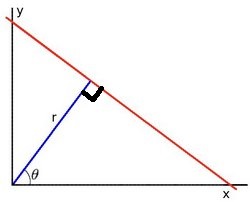
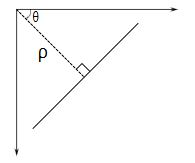
② 在极坐标系中:可由参数极经和极角(r,θ)表示。
对于霍夫线变换,我们将采用第二种方式极坐标系来表示直线,因此直线的表达式可为:
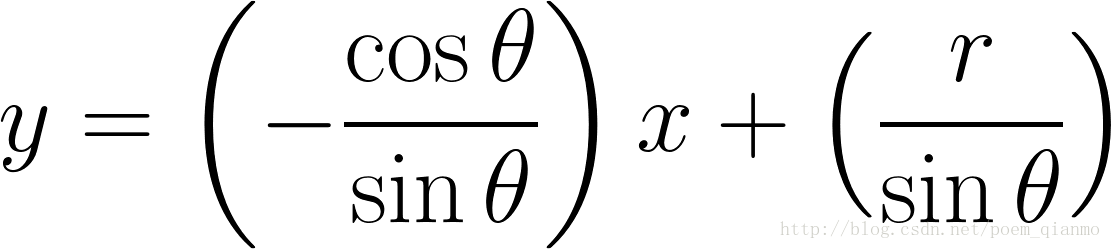
化简便可得到:

- 对于(x0,y0),我们可以将通过这一点的所有直线统一定义为:

这就意味着每一对  代表一条通过点
代表一条通过点  的直线。
的直线。
对于一个给定点
,我们可以在直角坐标系中,绘出所有通过它的直线(θ 为 x 轴,r 为 y 轴)。最终我们将得到一条正弦曲线。
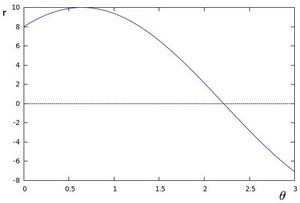
注意:只绘出满足下列条件的点  and
and  。
。
- 我们可以对图像中所有的点进行上述操作.。如果两个不同点进行上述操作后得到的曲线在平面
 -
-  相交, 这就意味着它们有一个公共的(θ,rθ),即过一条公共的直线。下图中,若曲线每点权重均为 1 ,则交点处权重为 3。
相交, 这就意味着它们有一个公共的(θ,rθ),即过一条公共的直线。下图中,若曲线每点权重均为 1 ,则交点处权重为 3。
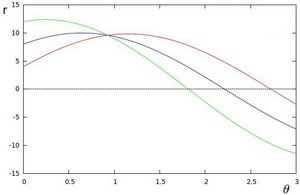
越多曲线交于一点,也就意味着这个交点表示的直线由更多的点组成,权重和越大。我们可以设置一个阈值,来决定多少条曲线交于一点(权重多大)我们才认为检测到了一条直线。
这就是霍夫线变换要做的.。它追踪图像中每个点对应曲线间的交点.。如果交于一点的曲线的数量超过了阈值, 那么可以认为这个交点所代表的参数对
 在原图像中为一条直线。
在原图像中为一条直线。
OpenCV 实现了以下三种霍夫线变换:
- 标准霍夫变换(StandardHough Transform,SHT)
- 原理在上面的部分已经说明了. 它能给我们提供一组参数对(ρ,θ)的集合来表示检测到的直线。
- 在 OpenCV 中通过函数 HoughLines 来实现。
- 多尺度霍夫变换(Multi-ScaleHough Transform,MSHT)
- 和标准霍夫变换类似。
- 累计概率霍夫变换(ProgressiveProbabilistic Hough Transform,PPHT),由HoughLinesP函数调用。
- 这是执行起来效率更高的霍夫线变换. 它输出检测到的直线的端点
 。
。 - 在 OpenCV 中它通过函数 HoughLinesP 来实现。
- 这是执行起来效率更高的霍夫线变换. 它输出检测到的直线的端点
void HoughLines(InputArray image, OutputArray lines, double rho, double theta, int threshold, double srn = 0, double stn = 0);
- image,输入图像,即源图像。需要为 8 位的单通道二值图像。
- lines,存放直线的矢量信息的数组。每条直线由具有 2 个元素的矢量(ρ,Θ)表示,其中,ρ 是离坐标原点(0,0)也就是图像左上角的距离,Θ 是弧度线条旋转角度(0 表示垂直直线,∏/2 表示水平直线,注意,不是 0 度和 90 度)
- rho,以像素为单位的距离精度。另一种表述是平面 - 中 r 轴的单位长度。
- theta,以弧度为单位的角度精度。另一种表示是平面 - 中 θ 轴的单位长度。
- threshold,权重累加平面的阈值参数。大于阈值 threshold 的线段才可以被确认为直线。
- srn,默认值为 0。多尺度霍夫线变换才会用到的参数。对于多尺度霍夫线变换,平面 - 中 r 轴的单位长度 = rho / srn。
- stn,默认值为 0。也是多尺度霍夫线变换才会用到的参数。对于多尺度霍夫线变换,平面 - 中 θ 轴的单位长度 = theta / stn。如果 srn、stn 同时为 0,就表示使用经典霍夫变换,否则两个参数都应该为正数。
代码示例:
#include<opencv.hpp>
#include<iostream>
using namespace std;
using namespace cv;
int hough_value = ;
Mat src, canny_img;
void hough_change(int, void*) {
vector<Vec2f>lines;
HoughLines(canny_img, lines, , CV_PI / 180.0, hough_value);
RNG rngs = { };
Mat show = src.clone();
for (int i = ; i < lines.size(); i++) {
float rho = lines[i][], theta = lines[i][]; double sin_theta = sin(theta), cos_theta = cos(theta);
double x = rho * cos_theta, y = rho * sin_theta; //以垂点为基础,将直线延长
Point pt1, pt2;
pt1.x = cvRound(x + * (-sin_theta));
pt1.y = cvRound(y + * (cos_theta));
pt2.x = cvRound(x - * (-sin_theta));
pt2.y = cvRound(y - * (cos_theta)); Scalar colors = Scalar(rngs.uniform(, ), rngs.uniform(, ), rngs.uniform(, ));
line(show, pt1, pt2, colors, );
}
imshow("show", show);
}
int main() {
src = imread("C:/Users/齐明洋/Desktop/1.jpg");
GaussianBlur(src, src, Size(, ), , );
imshow("src", src); Canny(src, canny_img, , , );
imshow("canny_img", canny_img); namedWindow("show");
createTrackbar("threshold", "show", &hough_value, , hough_change);
hough_change(, ); waitKey();
}
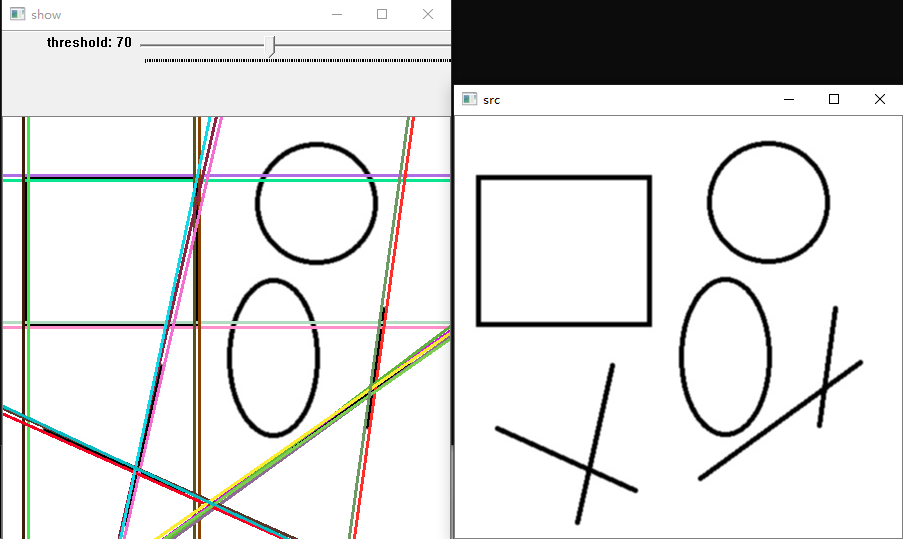
效果演示:
累计概率霍夫变换:HoughLinesP 函数
void HoughLinesP(InputArray image, OutputArray lines, double rho, double theta, int threshold, double minLineLength = 0, double maxLineGap= 0);
- lines,存放直线信息矢量的数组。每条直线由具有 4 个元素的矢量(x_1,y_1,x_2,y_2)表示,其中,(x_1,y_1)和(x_2,y_2)是每条检测到的直线的两端端点。
- minLineLength ,默认值为 0。最短线段的长度,比这个设定参数短的线段就不能被显现出来。
- maxLineGap,默认值为 0。允许将同一行点与点之间连接起来的最大距离。
- 其余参数,类比 HoughLines 函数的参数。
代码示例:
#include<opencv.hpp>
#include<iostream>
using namespace std;
using namespace cv;
int hough_value = ;
Mat src, canny_img;
void hough_change(int, void*) {
vector<Vec4f>lines;
HoughLinesP(canny_img, lines, , CV_PI / , hough_value, , );
RNG rngs = { };
Mat show = src.clone();
for (int i = ; i < lines.size(); i++) {
Point pt1, pt2;
pt1.x = lines[i][];
pt1.y = lines[i][];
pt2.x = lines[i][];
pt2.y = lines[i][]; Scalar colors = Scalar(rngs.uniform(, ), rngs.uniform(, ), rngs.uniform(, ));
line(show, pt1, pt2, colors, );
}
imshow("show", show);
}
int main() {
src = imread("C:/Users/齐明洋/Desktop/1.jpg");
GaussianBlur(src, src, Size(, ), , );
imshow("src", src); Canny(src, canny_img, , , );
imshow("canny_img", canny_img); namedWindow("show");
createTrackbar("threshold", "show", &hough_value, , hough_change);
hough_change(, ); waitKey();
}
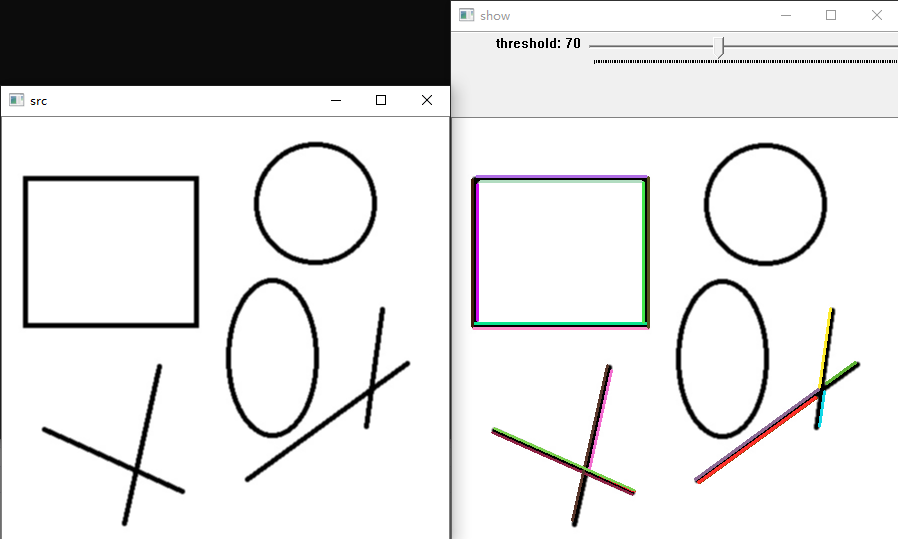
效果演示:
借鉴博客:https://www.cnblogs.com/xmu-rcs-jty/p/7531814.html
opencv —— HoughLines、HoughLinesP 霍夫线变换原理(标准霍夫线变换、多尺度霍夫线变换、累积概率霍夫线变换)及直线检测的更多相关文章
- opencv:霍夫直线检测
#include <opencv2/opencv.hpp> #include <iostream> using namespace cv; using namespace st ...
- Hough变换原理
Hough变换原理 一.简单介绍 Hough变换是图像处理中从图像中识别几何形状的基本方法之一.Hough变换的基本原理在于利用点与线的对偶性,将原始图像空间的给定的曲线通过曲线表达形式变为参数空间的 ...
- Python+OpenCV图像处理(十四)—— 直线检测
简介: 1.霍夫变换(Hough Transform) 霍夫变换是图像处理中从图像中识别几何形状的基本方法之一,应用很广泛,也有很多改进算法.主要用来从图像中分离出具有某种相同特征的几何形状(如,直线 ...
- 【python+opencv】直线检测+圆检测
Python+OpenCV图像处理—— 直线检测 直线检测理论知识: 1.霍夫变换(Hough Transform) 霍夫变换是图像处理中从图像中识别几何形状的基本方法之一,应用很广泛,也有很多改进 ...
- opencv直线检测在c#、Android和ios下的实现方法
opencv直线检测在c#.Android和ios下的实现方法 本文为作者原创,未经允许,不得转载 :原文由作者发表在博客园:http://www.cnblogs.com/panxiaochun/p/ ...
- opencv学习笔记霍夫变换——直线检测
参考大佬博文:blog.csdn.net/jia20003/article/details/7724530 lps-683.iteye.com/blog/2254368 openCV里有两个函数(比较 ...
- Win8 Metro(C#)数字图像处理--2.38Hough变换直线检测
原文:Win8 Metro(C#)数字图像处理--2.38Hough变换直线检测 [函数名称] Hough 变换直线检测 HoughLineDetect(WriteableBit ...
- Android开发中的OpenCV霍夫直线检测(Imgproc.HoughLines()&Imgproc.HoughLinesP())
本文为作者原创,转载请注明出处(http://www.cnblogs.com/mar-q/)by 负赑屃 //2017-04-21更新: 很多网友希望能得到源码,由于在公司做的,所以不太方便传出来 ...
- 霍夫直线检测 opencv
本次实验是检测图像中的直线,用到了HoughLines()和HoughLinesP()函数,其中HoughLinesP()称为累计概率霍夫变换,实验结果显示累计概率霍夫变换要比标准霍夫变换的效果好.具 ...
随机推荐
- C语言的安装及使用
安装 vc6.0 使用方法 new --- win32 Console Application --- ok-ok ------c++ Source File ------ ...
- 基于快排思想的第(前)k大(小)
算法思路就是根据快排的partition,先随机选择一个分隔元素(或a[0]),将数组分为[小于a[p]的元素] a[p] [大于a[p]的元素],如果这时候n-p+1等于k的话,a[p]就是所求的第 ...
- Linux 常用工具openssh之scp
前言 scp命令用于在Linux下进行远程拷贝文件的命令,和它类似的命令有cp,不过cp只是在本机进行拷贝不能跨服务器,而且scp传输是加密的.可能会稍微影响一下速度.当你服务器硬盘变为只读read ...
- Leetcode 题目整理-8 Count and Say
38. Count and Say The count-and-say sequence is the sequence of integers beginning as follows: 1, 11 ...
- 使用vscode进行远程开发
1.前置条件,安装SSH客户端.OpenSSH或者Git两者任选其一即可,本文使用的是Git 2.安装 Remote Development 扩展包 官方地址为:https://marketplace ...
- 一次DB故障引起的反思和MySQL Operator选型
前言 在一次数据库故障后,我们发现业务库会根据业务的等级会划分多个 MySQL 实例,许多业务库会同时属于一个 MySQL 实例,当一个库引发问题后整个实例的状态是不可控的.从而导致这个实例上的所有业 ...
- tmobst2
(单选题)与下面代码效果相同的HQL 语句是( ). Criteria criteria = session.createCriteria(User.class); criteria.add(Rest ...
- css-box-shadowing
box-shadow: h-shadow v-shadow blur spread color inset; 注释:box-shadow 向框添加一个或多个阴影.该属性是由逗号分隔的阴影列表,每个阴影 ...
- 关于SQL Server 2012 手动安装帮助文档
大家以为安装帮助文档很简单,但是其实不然,这其中还有那么一点点道道.今天我就来给大家演示一下! 首先到microsoft官网上下载Microsoft SQL Server 2012 产品文档,然后将. ...
- HDU6440 Dream(费马小定理+构造) -2018CCPC网络赛1003
题意: 给定素数p,定义p内封闭的加法和乘法,使得$(m+n)^p=m^p+n^p$ 思路: 由费马小定理,p是素数,$a^{p-1}\equiv 1(mod\;p)$ 所以$(m+n)^{p}\eq ...