【python+opencv】直线检测+圆检测
直线检测理论知识:
1.霍夫变换(Hough Transform) 霍夫变换是图像处理中从图像中识别几何形状的基本方法之一,应用很广泛,也有很多改进算法。主要用来从图像中分离出具有某种相同特征的几何形状(如,直线,圆等)。最基本的霍夫变换是从黑白图像中检测直线(线段)。
2.Hough变换的原理是将特定图形上的点变换到一组参数空间上,根据参数空间点的累计结果找到一个极大值对应的解,那么这个解就对应着要寻找的几何形状的参数(比如说直线,那么就会得到直线的斜率k与常熟b,圆就会得到圆心与半径等等)
3.霍夫线变换是一种用来寻找直线的方法。用霍夫线变换之前, 首先需要对图像进行边缘检测的处理,也即霍夫线变换的直接输入只能是边缘二值图像。
4.霍夫直线检测的具体原理参见:
https://blog.csdn.net/ycj9090900/article/details/52944708
http://lib.csdn.net/article/opencv/24201
#标准霍夫线变换
def line_detection():
image = cv.imread('line_detective.jpg')
cv.imshow('input_line_demo', image)
gray = cv.cvtColor(image, cv.COLOR_RGB2GRAY)
edges = cv.Canny(gray, 50, 150, apertureSize=3) #apertureSize参数默认其实就是3
cv.imshow("edges", edges)
lines = cv.HoughLines(edges, 1, np.pi/180, 80)
for line in lines:
rho, theta = line[0] #line[0]存储的是点到直线的极径和极角,其中极角是弧度表示的。
a = np.cos(theta) #theta是弧度
b = np.sin(theta)
x0 = a * rho #代表x = r * cos(theta)
y0 = b * rho #代表y = r * sin(theta)
x1 = int(x0 + 1000 * (-b)) #计算直线起点横坐标
y1 = int(y0 + 1000 * a) #计算起始起点纵坐标
x2 = int(x0 - 1000 * (-b)) #计算直线终点横坐标
y2 = int(y0 - 1000 * a) #计算直线终点纵坐标 注:这里的数值1000给出了画出的线段长度范围大小,数值越小,画出的线段越短,数值越大,画出的线段越长
cv.line(image, (x1, y1), (x2, y2), (0, 0, 255), 2) #点的坐标必须是元组,不能是列表。
cv.imshow("image-lines", image) #统计概率霍夫线变换
def line_detect_possible_demo():
image = cv.imread('line_detective.jpg')
cv.imshow('input_line_possible_demo',image)
gray = cv.cvtColor(image, cv.COLOR_RGB2GRAY)
edges = cv.Canny(gray, 50, 150, apertureSize=3) # apertureSize参数默认其实就是3
lines = cv.HoughLinesP(edges, 1, np.pi / 180, 60, minLineLength=60, maxLineGap=5)
for line in lines:
x1, y1, x2, y2 = line[0]
cv.line(image, (x1, y1), (x2, y2), (255, 0, 0), 3)
cv.imshow("line_detect_possible_demo",image)
注意:
1.opencv的HoughLines函数是标准霍夫线变换函数,该函数的功能是通过一组参数对  的集合来表示检测到的直线,
的集合来表示检测到的直线,
其函数原型为:HoughLines(image, rho, theta, threshold[, lines[, srn[, stn[, min_theta[, max_theta]]]]]) -> lines
image参数表示边缘检测cv.Canny()的输出图像,该图像为单通道8位二进制图像。
rho参数表示参数极径  以像素值为单位的分辨率,这里一般使用1像素。
以像素值为单位的分辨率,这里一般使用1像素。
theta参数表示参数极角  以弧度为单位的分辨率,这里使用1度。
以弧度为单位的分辨率,这里使用1度。
threshold参数表示检测一条直线所需最少的曲线交点。
lines参数表示储存着检测到的直线的参数对  的容器 。
的容器 。
srn参数、stn参数默认都为0。如果srn = 0且stn = 0,则使用经典的Hough变换。
min_theta参数表示对于标准和多尺度Hough变换,检查线条的最小角度。
max_theta参数表示对于标准和多尺度Hough变换,检查线条的最大角度。
2.opencv的HoughLinesP函数是统计概率霍夫线变换函数,该函数能输出检测到的直线的端点  ,
,
其函数原型为:HoughLinesP(image, rho, theta, threshold[, lines[, minLineLength[, maxLineGap]]]) -> lines
image参数表示边缘检测的输出图像,该图像为单通道8位二进制图像。
rho参数表示参数极径 以像素值为单位的分辨率,这里一般使用 1 像素。
theta参数表示参数极角 以弧度为单位的分辨率,这里使用 1度。
threshold参数表示检测一条直线所需最少的曲线交点。
lines参数表示储存着检测到的直线的参数对  的容器,也就是线段两个端点的坐标。
的容器,也就是线段两个端点的坐标。
minLineLength参数表示能组成一条直线的最少点的数量,点数量不足的直线将被抛弃。
maxLineGap参数表示能被认为在一条直线上的亮点的最大距离。
圆检测理论知识:
1.霍夫圆变换的基本原理和霍夫线变换原理类似,只是点对应的二维极径、极角空间被三维的圆心和半径空间取代。
在标准霍夫圆变换中,原图像的边缘图像的任意点对应的经过这个点的所有可能圆在三维空间用圆心和半径这三个参数来表示,其对应一条三维空间的曲线。
对于多个边缘点,点越多,这些点对应的三维空间曲线交于一点的数量越多,那么他们经过的共同圆上的点就越多,类似的我们也就可以用同样的阈值的方法来判断一个圆是否被检测到,
这就是标准霍夫圆变换的原理, 但也正是在三维空间的计算量大大增加的原因,标准霍夫圆变化很难被应用到实际中。
2.OpenCV实现的是一个比标准霍夫圆变换更为灵活的检测方法——霍夫梯度法,该方法运算量相对于标准霍夫圆变换大大减少。
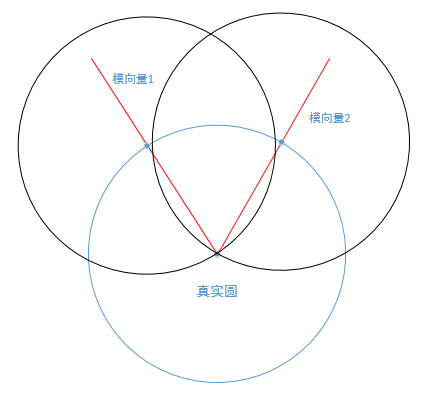
其检测原理是依据圆心一定是在圆上的每个点的模向量上,这些圆上点模向量的交点就是圆心,霍夫梯度法的第一步就是找到这些圆心,这样三维的累加平面就又转化为二维累加平面。
第二步是根据所有候选中心的边缘非0像素对其的支持程度来确定半径。注:模向量即是圆上点的切线的垂直线。
霍夫圆检测原理参考:
https://blog.csdn.net/dcrmg/article/details/52506538
http://www.cnblogs.com/FHC1994/p/9386783.html
def Detect_Circle_demo():
image = cv.imread('circle1.jpg')
#pyrMeanShiftFiltering(src, sp, sr[, dst[, maxLevel[, termcrit]]]) -> dst
#霍夫圆检测对噪声比较敏感,必须去噪(可以使用边缘保留滤波或高斯滤波)
dst = cv.pyrMeanShiftFiltering(image,10,100)
# dst = cv.GaussianBlur(image,(3,3),1)
cv.imshow('dst',dst)
gray = cv.cvtColor(image,cv.COLOR_BGR2GRAY)
circles = cv.HoughCircles(gray,cv.HOUGH_GRADIENT,1,20,param1=50,param2=30,minRadius=0,maxRadius=0)
circles = np.uint16(np.around(circles))
for i in circles[0 , : ]:
cv.circle(image,(i[0],i[1]),i[2],(0,0,255),2) #画圆
cv.circle(image,(i[0],i[1]),2,(255,0,0),2) #画圆心 cv.imshow('Detect_Circle_demo',image)
注意:
1.OpenCV的霍夫圆变换函数原型为:HoughCircles(image, method, dp, minDist[, circles[, param1[, param2[, minRadius[, maxRadius]]]]]) -> circles
image参数表示8位单通道灰度输入图像矩阵。
method参数表示圆检测方法,目前唯一实现的方法是HOUGH_GRADIENT(霍夫梯度)。
dp参数表示累加器与原始图像相比的分辨率的反比参数。
例如,如果dp = 1,则累加器具有与输入图像相同的分辨率。
如果dp=2,累加器分辨率是元素图像的一半,宽度和高度也缩减为原来的一半。
minDist参数表示检测到的两个圆心之间的最小距离。如果参数太小,除了真实的一个圆圈之外,可能错误地检测到多个相邻的圆圈。如果太大,可能会遗漏一些圆圈。
circles参数表示检测到的圆的输出向量,向量内第一个元素是圆的横坐标,第二个是纵坐标,第三个是半径大小。
param1参数表示Canny边缘检测的高阈值,低阈值会被自动置为高阈值的一半。
param2参数表示圆心检测的累加阈值,参数值越小,可以检测越多的假圆圈,但返回的是与较大累加器值对应的圆圈。
minRadius参数表示检测到的圆的最小半径。
maxRadius参数表示检测到的圆的最大半径。
2.OpenCV画圆的circle函数原型:circle(img, center, radius, color[, thickness[, lineType[, shift]]]) -> img
img参数表示源图像。
center参数表示圆心坐标。
radius参数表示圆的半径。
color参数表示设定圆的颜色。
thickness参数:如果是正数,表示圆轮廓的粗细程度。如果是负数,表示要绘制实心圆。
lineType参数表示圆线条的类型。
shift参数表示圆心坐标和半径值中的小数位数。
【python+opencv】直线检测+圆检测的更多相关文章
- OpenCV 学习笔记03 直线和圆检测
检测边缘和轮廓不仅重要,还经常用到,它们也是构成其他复杂操作的基础. 直线和形状检测与边缘和轮廓检测有密切的关系. 霍夫hough 变换是直线和形状检测背后的理论基础.霍夫变化是基于极坐标和向量开展的 ...
- opencv python:直线检测 与 圆检测
霍夫直线变换介绍 霍夫圆检测 现实中: example import cv2 as cv import numpy as np # 关于霍夫变换的相关知识可以看看这个博客:https://blog.c ...
- Python+OpenCV图像处理(十四)—— 直线检测
简介: 1.霍夫变换(Hough Transform) 霍夫变换是图像处理中从图像中识别几何形状的基本方法之一,应用很广泛,也有很多改进算法.主要用来从图像中分离出具有某种相同特征的几何形状(如,直线 ...
- Python+OpenCV图像处理(十五)—— 圆检测
简介: 1.霍夫圆变换的基本原理和霍夫线变换原理类似,只是点对应的二维极径.极角空间被三维的圆心和半径空间取代.在标准霍夫圆变换中,原图像的边缘图像的任意点对应的经过这个点的所有可能圆在三维空间用圆心 ...
- OpenCV——霍夫变换(直线检测、圆检测)
x #include <opencv2/opencv.hpp> #include <iostream> #include <math.h> using namesp ...
- hough变换检测直线和圆
图像测量和机器视觉作业: 提取图像中的直线和点的位置坐标,将其按一定顺序编码存入一文本文件,并在原图像上叠加显示出来. 下午实验了一下: 程序环境:vs2013(活动平台为x64)+opencv3.1 ...
- python实现直线检测
目录: (一)原理 (二)代码(标准霍夫线变换,统计概率霍夫线变换) (一)原理 1.霍夫变换(Hough Transform) 霍夫变换是图像处理中从图像中识别几何形状的基本方法之一,应用很广泛,也 ...
- opencv直线检测在c#、Android和ios下的实现方法
opencv直线检测在c#.Android和ios下的实现方法 本文为作者原创,未经允许,不得转载 :原文由作者发表在博客园:http://www.cnblogs.com/panxiaochun/p/ ...
- hough变换是如何检测出直线和圆的?
(I)直线篇 1 直线是如何表示的?对于平面中的一条直线,在笛卡尔坐标系中,常见的有点斜式,两点式两种表示方法.然而在hough变换中,考虑的是另外一种表示方式:使用(r,theta)来表示一条直线. ...
随机推荐
- selenium之 chromedriver与chrome版本映射表(更新至v2.31)
转自:http://blog.csdn.net/huilan_same/article/details/51896672 chromedriver版本 支持的Chrome版本 v2.31 v58-60 ...
- Android开发-- 使用ADT23 的一些问题
在使用最新版ADT 23进行android学习时发现一些问题: 1.通过设置intent的action来启动另外一个activity时,会出现No Activity found to handle I ...
- Apache Kafka 0.11版本新功能简介
Apache Kafka近日推出0.11版本.这是一个里程碑式的大版本,特别是Kafka从这个版本开始支持“exactly-once”语义(下称EOS, exactly-once semantics) ...
- windows内核情景分析之—— KeRaiseIrql函数与KeLowerIrql()函数
windows内核情景分析之—— KeRaiseIrql函数与KeLowerIrql()函数 1.KeRaiseIrql函数 这个 KeRaiseIrql() 只是简单地调用 hal 模块的 KfRa ...
- Delphi XE 10 跨平台三层数据库应用教程
Delphi XE 10 跨平台三层数据库应用教程 前言: Delphi XE 开始越来越庞大,比经典的Delphi7难用,但依然是目前所有跨平台开发工具中开发效率最高.最容易上手的,其快速设计RAD ...
- win7系统自带分区工具,能分出逻辑分区
先把硬盘里除了你装系统的主分区以外的分区全删除运行CMD输入 DISKPART然后输入list disk,找到你要分的盘,假如是要分第1个硬盘的就输入:select disk 0 这样就选择了第一个硬 ...
- SharpGL学习笔记(八) 矩阵堆栈和变换的综合例子: 机器人
我们先引入关于"矩阵堆栈"的官方说法: OpenGL的矩阵堆栈指的就是内存中专门用来存放矩阵数据的某块特殊区域.实际上,在创建.装入.相乘模型变换和投影变换矩阵时,都已用到堆栈操作 ...
- [原]VNC client 图形化连接 linux
1. # vncserver (启动vncserver,配置密码) 2. vim /root/.vnc/xstartup (在最后一排添加gnome-session & ) vim ...
- 部署OpenStack问题汇总(七)--解决apache启动错误"httpd:Could not reliably determine..."
今天在调试openstack的时候,重启apache,出现以下报错: [root@hctrl log]# service httpd restart 停止 httpd:[确定] 正在启动 httpd: ...
- FtpWebRequest UploadFile返回"The underlying connection was closed: The server committed a protocol violation."解决方法
将FtpWebRequest的KeepAlive设置为true. return Return<Boolean>( new Uri(ftpPath + fileName), request ...