驱动学习5: zynq实现点亮led
驱动代码:
#include <linux/module.h>
#include <linux/kernel.h>
#include <linux/fs.h>
#include <asm/irq.h>
#include <linux/init.h>
#include <linux/delay.h>
#include <linux/device.h> //包含了device、class 等结构的定义
#include <asm/io.h> //包含了ioremap、iowrite等内核访问IO内存等函数
#include <linux/uaccess.h> //包含了copy_to_user、copy_from_user等 #define DEVICE_NAME "axiled"
#define CLASS_NAME "zynqebb" /* XGPIO Physical address */
#define XGPIO_PHY_ADDR 0x41200000 //This Address is based SDK
/* Register Offset Definitions */
#define XGPIO_DATA_OFFSET (0x0) /* Data register */
#define XGPIO_TRI_OFFSET (0x4) /* I/O direction register */ volatile unsigned long *Gpio_DIR = NULL;
volatile unsigned long *Gpio_DATA = NULL; MODULE_AUTHOR("Xilinx ");
MODULE_DESCRIPTION("AXI GPIO moudle dirver");
MODULE_VERSION("v1.0");
MODULE_LICENSE("GPL"); static int axi_gpio_driver_major;
static struct class* axi_gpio_driver_class = NULL;
static struct device* axi_gpio_driver_device = NULL; unsigned long axi_gpio_virt_addr = ; //AXI_GPIO moulde's visual address static ssize_t axi_gpio_write(struct file * file, const char * buf, size_t count,loff_t *off)
{
//printk("axi_gpio_write\n");
int val;
copy_from_user(&val,buf,count);
printk("before Gpio_DATA:%lx,%lx.\n",Gpio_DATA,ioread32(Gpio_DATA)); if(val == )
{
//点灯
//*Gpio_DATA = (unsigned long )0x00000005; //设置AXI GPIO的方向输出全为高
iowrite32(0x0000000F,Gpio_DATA); //设置AXI GPIO的方向输出全为高
}
else
{
//灭灯
iowrite32(0x00000000,Gpio_DATA); //设置AXI GPIO的方向输出全为低
}
printk("after Gpio_DATA:%lx,%lx.\n",Gpio_DATA,ioread32(Gpio_DATA));
return ; } static int axi_gpio_open(struct inode *inode, struct file *filp)
{
//printk("axi_gpio_open\n"); //配置led管脚为输出
printk("before Gpio_DIR:%lx,%lx.\n",Gpio_DIR,ioread32(Gpio_DIR));
//*Gpio_DIR = (unsigned long )0x00000000; //设置AXI GPIO的方向输出
iowrite32(0x00000000,Gpio_DIR); //设置AXI GPIO的方向输出 printk("after Gpio_DIR:%lx,%lx.\n",Gpio_DIR,ioread32(Gpio_DIR)); return ;
} static struct file_operations axi_gpio_fops = {
.owner = THIS_MODULE,
.write = axi_gpio_write,
.open = axi_gpio_open,
}; static int __init axi_gpio_driver_module_init(void)
{
int ret; axi_gpio_driver_major=register_chrdev(, DEVICE_NAME, &axi_gpio_fops );//内核注册设备驱动
if (axi_gpio_driver_major < ){
printk("failed to register device.\n");
return -;
} axi_gpio_driver_class = class_create(THIS_MODULE, CLASS_NAME);//创建设备类
if (IS_ERR(axi_gpio_driver_class)){
printk("failed to create zxi_gpio moudle class.\n");
unregister_chrdev(axi_gpio_driver_major, DEVICE_NAME);
return -;
} axi_gpio_driver_device = device_create(axi_gpio_driver_class, NULL, MKDEV(axi_gpio_driver_major, ), NULL, DEVICE_NAME);
if (IS_ERR(axi_gpio_driver_device)){
printk("failed to create device .\n");
unregister_chrdev(axi_gpio_driver_major, DEVICE_NAME);
return -;
} //To get Custom IP--gpio moudle's virtual address
#if 1
if(request_mem_region(XGPIO_PHY_ADDR, 0x1000,DEVICE_NAME) == NULL ){
printk( "request_mem_region failed\n");
return -;
}
#endif
axi_gpio_virt_addr = (unsigned long)ioremap(XGPIO_PHY_ADDR, sizeof(u32));
//将模块的物理地址映射到虚拟地址上
printk( "ioremap called: phys %#08x -> virt %#08x\n",XGPIO_PHY_ADDR, axi_gpio_virt_addr );
//指定需要操作的寄存器的地址
Gpio_DIR = (unsigned long *)(axi_gpio_virt_addr + XGPIO_TRI_OFFSET);
Gpio_DATA = (unsigned long *)(axi_gpio_virt_addr + XGPIO_DATA_OFFSET); return ;
}
static void __exit axi_gpio_driver_module_exit(void)
{ //撤销映射关系
iounmap((void *)axi_gpio_virt_addr);
#if 1
release_mem_region(XGPIO_PHY_ADDR, 0x1000);
#endif
device_destroy(axi_gpio_driver_class, MKDEV(axi_gpio_driver_major, ));
class_unregister(axi_gpio_driver_class);
class_destroy(axi_gpio_driver_class);
unregister_chrdev(axi_gpio_driver_major, DEVICE_NAME);
printk("axi_gpio module exit.\n");
} module_init(axi_gpio_driver_module_init);
module_exit(axi_gpio_driver_module_exit);
应用层代码:
#include <sys/types.h>
#include <sys/stat.h>
#include <fcntl.h>
#include <stdio.h> /* firstdrvtest on
* firstdrvtest off
*/
int main(int argc, char **argv)
{
int fd;
int val = ;
fd = open("/dev/axiled", O_RDWR);
if (fd < )
{
printf("can't open!\n");
}
if (argc != )
{
printf("Usage :\n");
printf("%s <on|off>\n", argv[]);
return ;
} if (strcmp(argv[], "on") == )
{
val = ;
}
else
{
val = ;
} write(fd, &val, );
return ;
}
插入模块:
root@plnx_arm:/mnt# insmod mytest.ko
ioremap called: phys 0x41200000 -> virt 0xf09f0000
测试设备号:

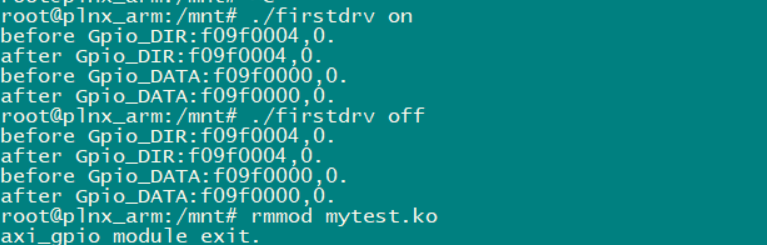
运行应用程序:
驱动学习5: zynq实现点亮led的更多相关文章
- zigbee学习之路(二)点亮LED
一.前言 今天,我来教大家如何点亮led,这也是学习开发板最基础的步骤了. 二.原理分析 cc2530芯片跟虽然是51的内核,但是它跟51单片机还是有区别的,51单片机不需要对IO口进行配置,而cc2 ...
- 学习笔记——单片机简介 & 点亮LED & 流水灯 & 电路基础【更新Ing】
视频地址:https://www.bilibili.com/video/av10765766 超详细!!!!!! 单片机内部三大资源 [资源:单片机可提供使用的东西] FLASH 可以重复擦写 断电后 ...
- 嵌入式linux驱动开发之点亮led(驱动编程思想之初体验)
这节我们就开始开始进行实战啦!这里顺便说一下啊,出来做开发的基础很重要啊,基础不好,迟早是要恶补的.个人深刻觉得像这种嵌入式的开发对C语言和微机接口与原理是非常依赖的,必须要有深厚的基础才能hold的 ...
- 驱动编程思想之初体验 --------------- 嵌入式linux驱动开发之点亮LED
这节我们就开始开始进行实战啦!这里顺便说一下啊,出来做开发的基础很重要啊,基础不好,迟早是要恶补的.个人深刻觉得像这种嵌入式的开发对C语言和微机接口与原理是非常依赖的,必须要有深厚的基础才能hold的 ...
- STM32学习笔记——点亮LED
STM32学习笔记——点亮LED 本人学习STM32是直接通过操作stm32的寄存器,使用的开发板是野火ISO-V2版本: 先简单的介绍一下stm32的GPIO: stm32的GPIO有多种模式: 1 ...
- ARM学习篇一 点亮LED
要点亮LED,先决条件是什么,当然得有相应的硬件设施.板子的整个电路图比较大,我就直接取相关部分. 给发光二级管加上3.3v电压后,通过1k电阻,直接与S3C2440连接.至于为什么要加电阻,大家应该 ...
- liunx驱动----点亮LED
自动挂接根文件系统(直接从NFS启动) 修改uboot命令行 把 bootargs=noinitrd root=/dev/mtdblock3 init=/linuxrc console=ttySAC0 ...
- JZ2440开发板:用按键点亮LED灯(学习笔记)
本文是对韦东山嵌入式第一期学习的记录之一,如有您需要查找的信息,可以继续往下阅读. 想要用按键点亮LED灯,就需要知道按键和LED灯的相关信息,这样才可以进行之后的操作.阅读JZ2440的原理图,可以 ...
- JZ2440裸机点亮LED【学习笔记】
平台:jz2440 作者:庄泽彬(欢迎转载,请注明作者) 说明:韦东山一期视频学习笔记 一.我们首先来做第一个实验,用汇编语言点亮板子上的LED. 1.1 LED的原理图 从下面的原理图可知LED1是 ...
随机推荐
- Python 招聘信息爬取及可视化
自学python的大四狗发现校招招python的屈指可数,全是C++.Java.PHP,但看了下社招岗位还是有的.于是为了更加确定有多少可能找到工作,就用python写了个爬虫爬取招聘信息,数据处理, ...
- ES6的新特性(8)——数组的扩展
数组的扩展 扩展运算符 含义 扩展运算符(spread)是三个点(...).它好比 rest 参数的逆运算,将一个数组转为用逗号分隔的参数序列. console.log(...[1, 2, 3]) / ...
- 关于XML文档操作类
using System; using System.Collections.Generic; using System.Linq; using System.Text; using System.X ...
- LeetCode 48. Rotate Image (C++)
题目: You are given an n x n 2D matrix representing an image. Rotate the image by 90 degrees (clockwis ...
- "助成"招聘网站视频简介
我们小组为我们的作品录制了一个一分多钟的电梯介绍视频,这是视频连接,我上传到了优酷上:http://v.youku.com/v_show/id_XMzIzMTc1ODc2NA==.html?spm=a ...
- mysql 查询数据库或某张表有多大(字节)
转载:https://www.cnblogs.com/diandiandidi/p/5582309.html 1.要查询表所占的容量,就是把表的数据和索引加起来就可以了 select sum(DATA ...
- 各团队对《t铁大导航》评价及我组回复
组名 对我们组的建议 我组回复 (1)跑男 你们的导航前期要做到什么样的程度呢?其实我一直是很期待你们完成时我能够用你们的导航来感受一下咱们铁大校园风情.你们用了数据结构算法来找最短路径,那你们能不能 ...
- 浅谈Java变量的初始化顺序详解
规则1(无继承情况下):对于静态变量.静态初始化块.变量.初始化块.构造器,它们的初始化顺序依次是(静态变量.静态初始化块)>(变量.初始化块)>构造器证明代码: 复制代码 代码如下: p ...
- Scala快速入门-函数组合
compose&andThen 两个函数组装为一个函数,compose和andThen相反 def f(test: String):String = { "f(" + te ...
- PHP开发工具(CodeLobster PHP Edition)
参考:http://www.uzzf.com/soft/45948.html 产品名:ttrar.com 密 钥:dstp-187c-9cdd-9a60-e185-b280 CodeLobste ...