基于虚拟机+Ubuntu1604的ROS-kinetic配置流程
简单记录一下配置的过程
先换源,以阿里源为例
备份原有源
sudo cp /etc/apt/sources.list /etc/apt/sources_init.list
编辑源文件
sudo gedit /etc/apt/sources.list
将文件内容全部删除 替换成
deb http://mirrors.aliyun.com/ubuntu/ xenial main
deb-src http://mirrors.aliyun.com/ubuntu/ xenial main deb http://mirrors.aliyun.com/ubuntu/ xenial-updates main
deb-src http://mirrors.aliyun.com/ubuntu/ xenial-updates main deb http://mirrors.aliyun.com/ubuntu/ xenial universe
deb-src http://mirrors.aliyun.com/ubuntu/ xenial universe
deb http://mirrors.aliyun.com/ubuntu/ xenial-updates universe
deb-src http://mirrors.aliyun.com/ubuntu/ xenial-updates universe deb http://mirrors.aliyun.com/ubuntu/ xenial-security main
deb-src http://mirrors.aliyun.com/ubuntu/ xenial-security main
deb http://mirrors.aliyun.com/ubuntu/ xenial-security universe
deb-src http://mirrors.aliyun.com/ubuntu/ xenial-security universe
apt二连
sudo apt-get update
sudo apt-get upgrade
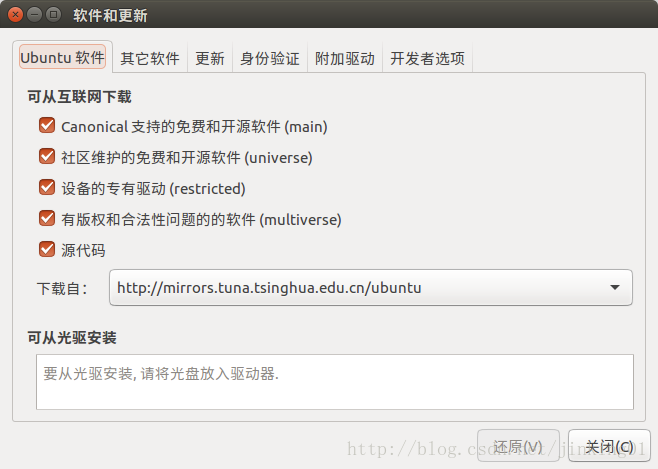
设置“软件和更新”
sudo update-manager -c -d
如果要升级就升级,升级完后点左下角的设置就可以进到界面了,前四个勾选上,第五个可选
添加中科大ROS源
sudo sh -c '. /etc/lsb-release && echo "deb http://mirrors.ustc.edu.cn/ros/ubuntu/ $DISTRIB_CODENAME main" > /etc/apt/sources.list.d/ros-latest.list'
设置秘钥
sudo apt-key adv --keyserver hkp://ha.pool.sks-keyservers.net:80 --recv-key 421C365BD9FF1F717815A3895523BAEEB01FA116
更新软件源并安装ROS
sudo apt-get update
sudo apt-get install ros-kinetic-desktop-full
初始化rosdep
sudo rosdep init
rosdep update
设置环境变量(可选)
echo "source /opt/ros/kinetic/setup.bash" >> ~/.bashrc
source ~/.bashrc
如果不设置则需要每次在包的路径下使用
source setup.bash
安装一些常用工具
sudo apt install python-rosinstall python-rosinstall-generator python-wstool build-essential python-rosdep ninja-build
此时可以测试下例程了,方法见前篇ROSOnWindows,编译方法和Windows下相同,不再赘述
如果要编译,那么还会遇到非常多问题,主要是没有安装上对应的包,这点ROSOnWindows我觉得做的就好很多,这里列出常见的包,其他可以通过百度对应问题来解决
(这里非常建议直接装二进制包,如果不是需要修改该包,就不要将编译包作为源码引入新包,这样“可能”会产生很大的依赖问题)
sudo aptitude install libsdl1.-dev sudo apt-get install libbullet-dev libsdl-image1.-dev libasound2-dev sudo apt-get install ros-kinetic-bfl ros-kinetic-arbotix ros-kinetic-gazebo-ros-control ros-kinetic-gmapping sudo apt-get install ros-kinetic-move-base-msgs ros-kinetic-moveit ros-kinetic-manipulation-msgs ros-kinetic-rplidar-ros sudo apt-get install ros-kinetic-vision-opencv libopencv-dev python-opencv ros-kinetic-map-server
后续缺少相应包的时候也可以用这个方式尝试,package 替换为对应的包名字
sudo apt-get install package
如果遇到了这个报错,那么是内存不足,提高虚拟机的内存即可,如果内存有上限,则开启虚拟内存
c++internalcompiler error:killed(program cc1plus)
如果Gazebo黑屏,那是因为没有加载完模型,可以先把所有模型下载好,笔者下载全部模型用了近一个小时
cd ~/.gazebo/
mkdir -p models
cd ~/.gazebo/models/
wget http://file.ncnynl.com/ros/gazebo_models.txt
wget -i gazebo_models.txt
ls model.tar.g* | xargs -n1 tar xzvf
如果报错“ vmw_ ioctl_command error Invalid argument ”,则关闭虚拟机,然后在设置里面关闭“加速3D图形”即可

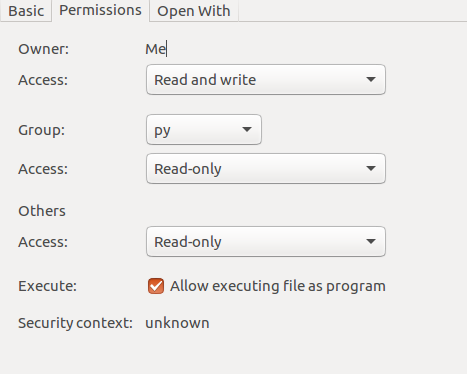
如果遇到执行python脚本时显示“ can't locate node [xxxx] in package [yyyy] ”,假设程序是完整的并且没有问题的(如跑例程),那么就是没有给py权限,勾选上“ Execute ”
感谢以下Geeks
Ubuntu install of ROS Kinetic
http://wiki.ros.org/kinetic/Installation/Ubuntu
ROS学习过程中问题
https://blog.csdn.net/t972409256/article/details/82661633
ubuntu系统下ros系统问题的解决方法示例
https://blog.csdn.net/Groot_Lee/article/details/79202507
虚拟机运行Gazebo问题修复
http://blog.exbot.net/archives/3035
用Python实现ROS节点
https://blog.csdn.net/u013832707/article/details/53980759
基于虚拟机+Ubuntu1604的ROS-kinetic配置流程的更多相关文章
- Ros Kinetic 配置 OpenCV2和CV_bridge (Python, C++)
本篇介绍如何在Ros-kinetic环境下运用opencv2进行开发的配置,系统平台为64位Ubuntu16.04. 需要系统环境: 1.Ros kinetic版本,一般自带cv_bridge, 若没 ...
- QT特供 CGAL配置流程(基于QT5+VS2015)
最近做的QT项目涉及计算几何库,需要用到CGAL,其配置着实麻烦,而且相互关联的软件也存在版本兼容一类的问题,在这里就对其配置流程做一些整理说明,以便后来者能够少些烦恼.(注:以下使用Win10作说明 ...
- 在ROS Kinetic和Gazebo 8中使用智能汽车仿真演示
在ROS Kinetic和Gazebo 8中使用智能汽车仿真演示 智能车无人驾驶技术是目前人工智能和机器人技术的研究热点,有许多开源平台可以使我们零基础零成本入门无人驾驶技术.本文分享一下目前ROS官 ...
- win10下vagrant+centos7 rails虚拟开发机配置流程
此文写于2017.8.21 在写本文前,笔者已经尝试了多种其他的替代方法,例如wmware虚拟机安装kylin.然而发现总是还有各种问题.经大佬指点安装了virtualbox + vagrant.于是 ...
- Linux下双网卡Firewalld的配置流程
实验室拟态存储的项目需要通过LVS-NAT模式通过LVS服务器来区隔内外网的服务,所以安全防护的重心则落在了LVS服务器之上.笔者最终选择通过firewalld放行端口的方式来实现需求,由于firew ...
- ROS_Kinetic_02 ROS Kinetic 迁移指南及中文wiki指南(Migration guide)
ROS_Kinetic_02 ROS Kinetic 迁移指南(Migration guide) 对于ROS Kinetic Kame有些功能包已经更新改变,提供关于这些包的迁移注意或教程.主要针对于 ...
- ROS_Kinetic_01 在ubuntu 16.04安装ROS Kinetic 2017.01更新
ROS_Kinetic系列学习(一),在ubuntu 16.04安装ROS Kinetic. Celebrating 9 Years of ROS! ubuntu16.04已经发布半年多了,ROS的K ...
- SLAM+语音机器人DIY系列:(二)ROS入门——3.在ubuntu16.04中安装ROS kinetic
摘要 ROS机器人操作系统在机器人应用领域很流行,依托代码开源和模块间协作等特性,给机器人开发者带来了很大的方便.我们的机器人“miiboo”中的大部分程序也采用ROS进行开发,所以本文就重点对ROS ...
- Ubuntu 16.04 ROS环境配置
最近新入职一家公司,是搞智能无人驾驶的,用的操作系统是Ubuntu和ros,之前没接触过ros系统,既然公司用那就必须的学习啊,话不多说先装它一个ros玩玩... 1. Ubuntu 安装 ROS K ...
随机推荐
- python基础教程_查询价格
少儿编程和数学是有这一定联系的,若是将编程弄好了,数学成绩也就会有所提高,今天就为大家来介绍一下一个关于数学的相关编程,现在我们就来看看吧! 题目描述 编程实现以下功能:查询水果的单价.有4种水果,苹 ...
- Spring Boot打包运行
一:pom.xml配置修改 <!--如果想打成jar包,修改为jar--> <packaging>war</packaging> <dependency> ...
- 《JAVA高并发编程详解》-并发编程有三个至关重要的特性:原子性,有序性,可见性
- C#JsonConvert.DeserializeObject反序列化json字符
需求:需要把第一个id替换掉,在序列化成json dynamic dyn = Newtonsoft.Json.JsonConvert.DeserializeObject(json); foreach ...
- C# vb .net实现棕褐色效果特效滤镜
在.net中,如何简单快捷地实现Photoshop滤镜组中的棕褐色效果呢?答案是调用SharpImage!专业图像特效滤镜和合成类库.下面开始演示关键代码,您也可以在文末下载全部源码: 设置授权 第一 ...
- 关于Html中的title属性内容换行,以及Bootstrap的tooltip的使用
1.HTML中的title属性的内容换行: 鼠标经过悬停于对象时提示内容(title属性内容)换行排版方法,html title 换行方法总结. html的title属性默认是显示一行的.如何换行呢? ...
- Linux:检查当前运行级别的五种方法
运行级就是Linux操作系统当前正在运行的功能级别.存在七个运行级别,编号从0到6.系统可以引导到任何给定的运行级别.运行级别由数字标识. 每个运行级别指定不同的系统配置,并允许访问不同的进程组合.默 ...
- 水泥caement单词
Caement英语单词,翻译为:水泥 中文名:水泥 外文名:caement 目录 释义 caement 读音:英 [sɪˈment] 美 [sɪˈmɛnt] Noun名词. 水泥; caement在英 ...
- CentOS - Eclipse安装Shelled
一,下载Shelled: https://sourceforge.net/projects/shelled/ 二,打开Eclipse,以离线方式安装: Help->Install New Sof ...
- windows环境下安装mysql5.7.20
配置my.ini文件 [client] port=3306 default-character-set=utf8 [mysqld] # 设置为自己MYSQL的安装目录 basedir=D:\Progr ...