IMU
(1)用IMU来进行预测
读入一个10/20帧的数据集,通过IMU来初步预测出位姿以及显示其路径。
(2)通过光度差或者什么来作为更新部分,通过相机的观测方程算出增益,随后进行更新。
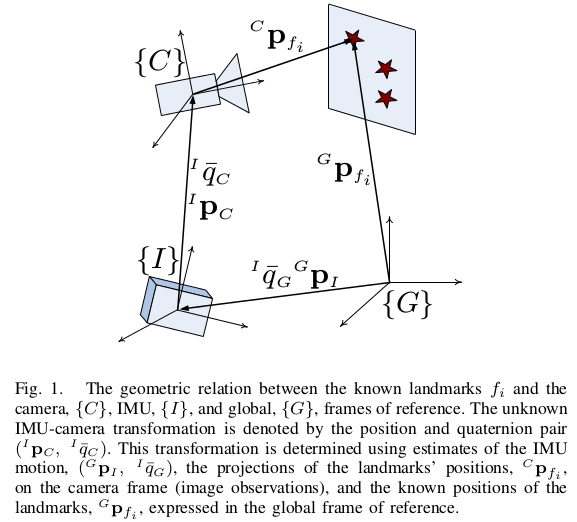
A. Filter Initialization
误差状态的运动方程
2.1连续时间的IMU系统动态方程
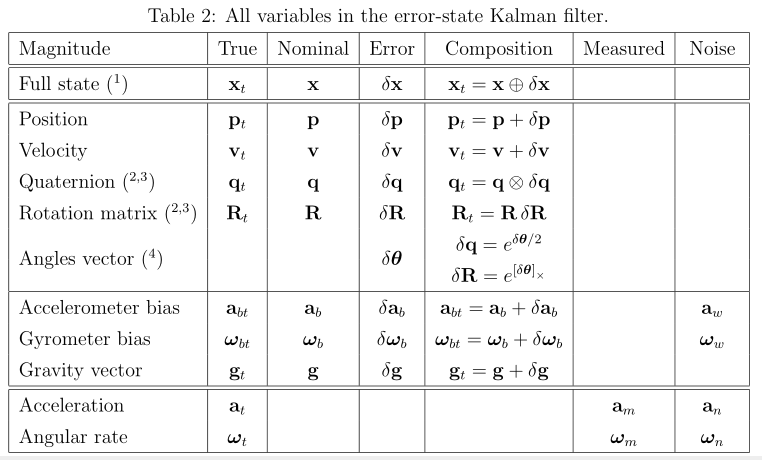
这里涉及到真实值(true-),标称值(nominal-),和误差状态值(error-state)三个量,真实值是有标称值和误差值组合而来。标称值是有非线性方程而来的"大信号",误差值的线性方程而来满足线性高斯滤波的“小信号”。
2.1.1相关变量
- 这里的相关变量中,输入值是IMU的测量值,以及当地重力加速度。其他真值值变量的值都是由他们而来。其中normal值是一个抽象变量,表示理想值,是无法估计的,在融合中我们使用估计的真实值做为标称值来预测。
- 标称值是完全理想值,我们把各种因素产生的真实值和标称值的不确定性归于变量表示。
- 这里采用Hamilton 四元数的表述方法
- 这里的角速率使用的是locally的表述,这样可以直接使用机体系b下的传感器测量值
- 这里的角度误差使用的也是locally的表述,这是很多文献和算法采用的经典方式,不过有证明说采用globally的方式定义的角度误差有更好的性质。
- 这里的加速度定义的是globally,我的理解是,方便计算导航系下的速度和位置。
2.1.2真实状态运动方程(true-state kinematics equations )
- true-state 变量表示的运动方程.IMU bias的噪声定义为随机游走。
由于初始状态姿态未知,这种不确定即重力加速度向量的不确定,但是实际工程中我们是制定初始状态的,即重力加速度不确定不再存在,这里的方程也认为其为恒定值。
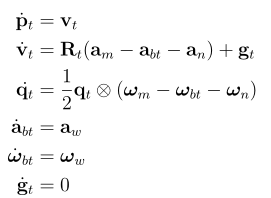
.IMU误差来源分为两种,内部bias
这里的IMU真实值是没有bias和测量噪声的值,IMU加速度计测量加速度不包含重力加速度,即如果自由落体运动,不考虑噪声加速度计的读数是0。
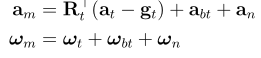
利用IMU测量代替真实值的系统真实状态运动方程,该方程状态为,由IMU的含噪声测量值驱动,并受高斯白噪声干扰.

IMU的更多相关文章
- oracle的IMU和ora-01555
IMU: 01555: 按照上图找啊找,已经提交事物的undo块找不到了,就产生01555错误,解决这样问题:1. 确保undo表空间数据的保留时间至少大于最长sql语句的时间 2. 增大undo表空 ...
- ROS实时采集Android的图像和IMU数据
前言 临近毕业,整理一下之前做的东西.这篇博客来自于博主在2016年3月份投的一篇会议论文(论文主要介绍了一个基于手机摄像头和IMU的简单VIO系统,用于AR的Tracking部分,本博文 ...
- 【浅析】IMU代码
IMU的代码的引自https://storage.googleapis.com/google-code-archive-downloads/v2/code.google.com/imumargalgo ...
- [转]A Guide To using IMU (Accelerometer and Gyroscope Devices) in Embedded Applications.
原文地址http://www.starlino.com/imu_guide.html Introduction There’s now a FRENCH translation of this art ...
- SLAM+语音机器人DIY系列:(三)感知与大脑——2.带自校准九轴数据融合IMU惯性传感器
摘要 在我的想象中机器人首先应该能自由的走来走去,然后应该能流利的与主人对话.朝着这个理想,我准备设计一个能自由行走,并且可以与人语音对话的机器人.实现的关键是让机器人能通过传感器感知周围环境,并通过 ...
- 转载泡泡机器人——IMU预积分总结与公式推导2
本文为IMU预积分总结与公式推导系列技术报告的第二篇. 承接第一篇的内容,本篇将推导IMU预积分的测量值,并分析其测量误差的分布形式. 传统捷联惯性导航的递推算法,以初始状态为基础,利用IMU测量得到 ...
- 转载泡泡机器人——IMU预积分总结与公式推导1
IMU预积分技术最早由T Lupton于12年提出[1],C Forster于15年[2][3][4]将其进一步拓展到李代数上,形成了一套优雅的理论体系.Forster将IMU预积分在开源因子图优化库 ...
- 适合高要求应用的高性能MEMS IMU解决方案
对于复杂且高动态惯性配置的MEMS IMU应用,评估功能时需要考虑许多属性.在设计周期早期评估这些属性优于追逐开放性成果,从而实现“尽可能精确”.ADI近期举行的在线研讨会[适合高要求应用的高性能ME ...
- vins-mono中的imu参数设置
na:加速度计的测量噪声 nw:陀螺仪的测量噪声 nba: randow walk noise随机游走噪声 nbw:randow walk noise随机游走噪声 ba:加速度计的偏差 bw:陀螺仪的 ...
- IMU 标定 | 工业界和学术界有什么不同?
点击"计算机视觉life"关注,置顶更快接收消息! 由于格式问题最好在公众号上观看<IMU 标定-工业界和学术界有什么不同?> 本文主要介绍了IMU基本结构原理和误差的 ...
随机推荐
- C++ Primer Plus (Stephen Prata 著)
第1章 预备知识 (已看) 第2章 开始学习C++ (已看) 第3章 处理数据 (已看) 第4章 复合类型 (已看) 第5章 循环和关系表达式 (已看) 第6章 分支语句和逻辑运算符 (已看) 第7章 ...
- 策略模式(Strategy )
为实现一个目的采用不同的方式都可实现,具体看要采取哪种方式. //接口 public interface Strategy { public void algorithmInterface(); ...
- 网络之 Iptables总结
查询iptables -L 默认 filter表iptables -L -t filteriptables -L -t natiptables -L -t mangle Filter表service ...
- 2.3 Visio画虚线后插入word或PPT变为实线
选中实线后,左键选择->格式->线条->粗细->自定义->设置为0pt
- LOJ 3057 「HNOI2019」校园旅行——BFS+图等价转化
题目:https://loj.ac/problem/3057 想令 b[ i ][ j ] 表示两点是否可行,从可行的点对扩展.但不知道顺序,所以写了卡时间做数次 m2 迭代的算法,就是每次遍历所有不 ...
- 汉语言处理工具pyhanlp的简繁转换
繁简转换 HanLP几乎实现了所有我们需要的繁简转换方式,并且已经封装到了HanLP中,使得我们可以轻松的使用,而分词器中已经默认支持多种繁简格式或者混合.这里我们不再做过多描述. 说明: ·Ha ...
- Excel技巧--分隔工资条
要将上图的工资表,做成每行都带标题而且有空行间隔的工资条,可以这么做: 1.表格右侧添加一列数据列:输入1,2,选定,并双击单元格右下角形成一升序数字列: 2.再将该列复制,粘贴到该列末尾: 3.点一 ...
- linux上静态库和动态库的编译和使用(附外部符号错误浅谈)
主要参考博客gcc创建和使用静态库和动态库 对于熟悉windows的同学,linux上的静态库.a相当于win的.lib,动态库.so相当于win的.dll. 首先简要地解释下这两种函数库的区别,参考 ...
- Delphi调用大漠插件示例
Delphi XE2 版本调用大漠插件方法:打开Component->Import Component->默认Import a Type Library,点击Next->找到Dm.d ...
- 3.STM32复位系统
一.概念 复位: 使系统结束当前运行状态,重新开始运行,并根据复位种类,将系统的寄存器(特定的寄存器除外)恢复到默认状态. 二.复位的种类 1.系统复位 将除了系统后备区域寄存器(BKP)和时钟控制寄 ...