ROS-SLAM-自主导航
前言:无。
前提:已下载并编译了相关功能包集,如还未下载,可通过git下载:https://github.com/huchunxu/ros_exploring.git
一、启动仿真环境
cd ~/catkin_ws/src/robot_mrobot/mrobot_gazebo/launch roslaunch mrobot_laser_nav_gazebo.launch
二、启动slam导航
cd ~/catkin_ws/src/robot_mrobot/mrobot_navigation/launch roslaunch exploring_slam_demo.launch
三、手动探索
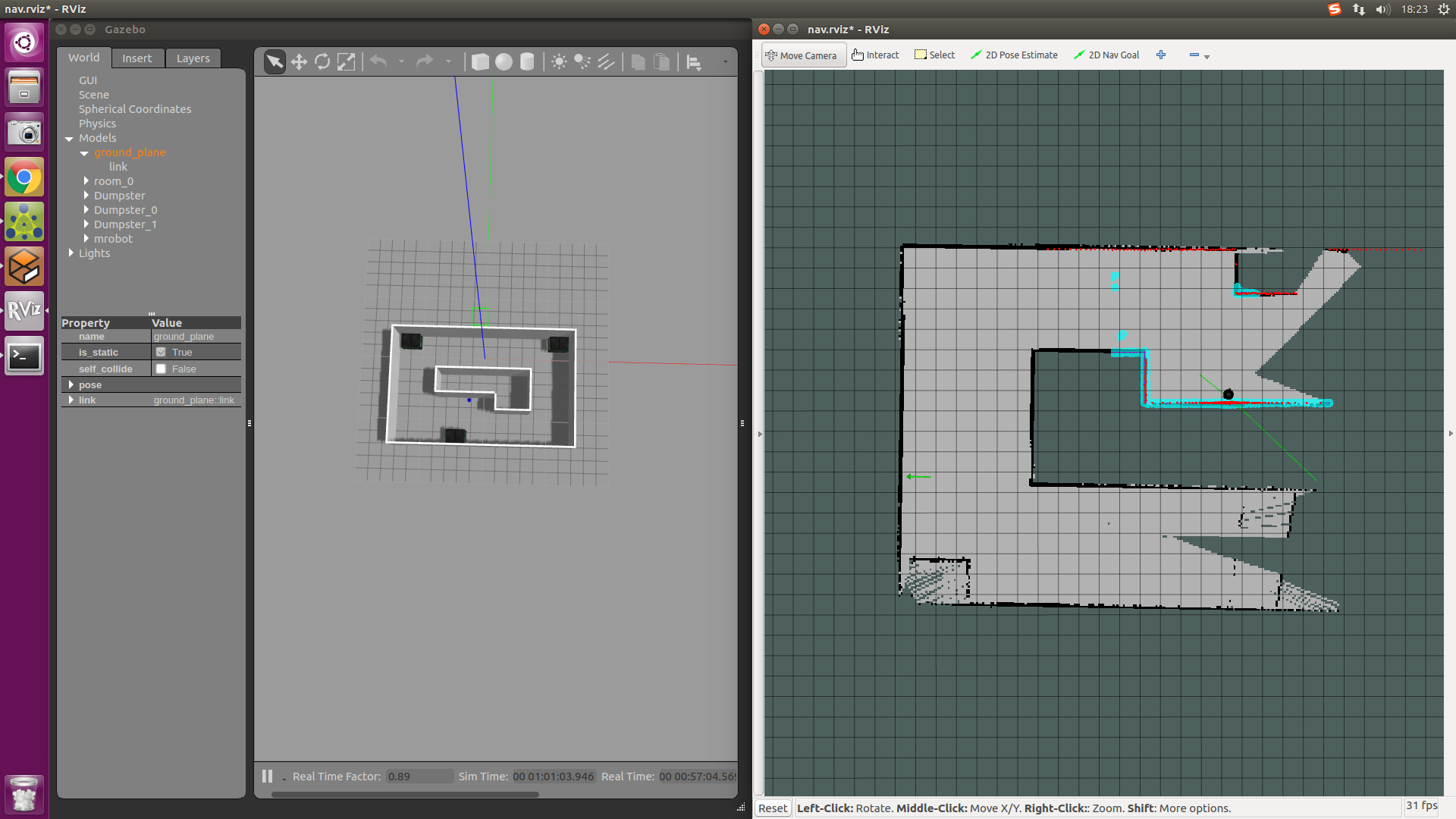
使用rviz的“2D nav goal”手动选择目的地,机器人开始导航,同时使用mapping算法实时构建地图。
效果如下;

如果多次尝试无果,机器人最终会放弃,终端里将看到错误提示。
四、自动slam导航
rosrun mrobot_navigation random_navigation.py
----------------------------------
显示如下:
-END-
ROS-SLAM-自主导航的更多相关文章
- 入门ROS教程与视频汇总(kinetic)
参考网址: Richard Wang 3 Shawn Chen 部分视频网址: http://v.youku.com/v_show/id_XMjUxMTc5MzE5Mg http://i.you ...
- SLAM+语音机器人DIY系列:(二)ROS入门——7.理解tf的原理
摘要 ROS机器人操作系统在机器人应用领域很流行,依托代码开源和模块间协作等特性,给机器人开发者带来了很大的方便.我们的机器人“miiboo”中的大部分程序也采用ROS进行开发,所以本文就重点对ROS ...
- SLAM+语音机器人DIY系列:(二)ROS入门——10.在实际机器人上运行ROS高级功能预览
摘要 ROS机器人操作系统在机器人应用领域很流行,依托代码开源和模块间协作等特性,给机器人开发者带来了很大的方便.我们的机器人“miiboo”中的大部分程序也采用ROS进行开发,所以本文就重点对ROS ...
- 【ros】rplidar Hector Slam
想用rplidar跑一下hector slam,在网上发现了几个教程写的都不错,但是亲测发现都有点不足,综合了一下,进行补充. 1. 安装ros 和 创建工作空间 http://blog.csdn.n ...
- implement Google's Open Source Slam "Cartographer" demos in ROS/rviz
Cartographer is a backpack equipped with Simultaneous Localization and Mapping (SLAM) technology. 1. ...
- ROS_Kinetic_27 在ROS中使用Cartographer进行SLAM
ROS_Kinetic_27 在ROS中使用Cartographer进行SLAM Cartographer是谷歌新開源的通用的2D和3D定位與構圖同步的SLAM工具,並提供ROS接口. 论文Real- ...
- Learning ROS for Robotics Programming Second Edition学习笔记(十) indigo Gazebo rviz slam navigation
中文译著已经出版,详情请参考:http://blog.csdn.net/ZhangRelay/article/category/6506865 moveit是书的最后一章,由于对机械臂完全不知,看不懂 ...
- Learning ROS for Robotics Programming Second Edition学习笔记(三) indigo rplidar rviz slam
中文译著已经出版,详情请参考:http://blog.csdn.net/ZhangRelay/article/category/6506865 Learning ROS for Robotics Pr ...
- SLAM+语音机器人DIY系列:(二)ROS入门——1.ROS是什么
摘要 ROS机器人操作系统在机器人应用领域很流行,依托代码开源和模块间协作等特性,给机器人开发者带来了很大的方便.我们的机器人“miiboo”中的大部分程序也采用ROS进行开发,所以本文就重点对ROS ...
- SLAM+语音机器人DIY系列:(二)ROS入门——2.ROS系统整体架构
摘要 ROS机器人操作系统在机器人应用领域很流行,依托代码开源和模块间协作等特性,给机器人开发者带来了很大的方便.我们的机器人“miiboo”中的大部分程序也采用ROS进行开发,所以本文就重点对ROS ...
随机推荐
- Codeforces Round #455
Generate Login 第二个单词肯定只取首字母 Solution Segments 从1开始的线段和在n结束的线段各自凑一凑,剩下的转化为规模为n-2的子问题. Solution Python ...
- j2ee学习笔记
Servlet: ①字符集问题:②身份验证:③统一的输入输出:类似母版,重写ServletResponeceWraper的getWriter,使用缓存流. 然后输出时,分析stringWriter , ...
- mysql 主从错误情况与原因
mysql 主从错误情况1,master 上删除一条记录是从库报错 找不到该记录引起原因:master出现宕机或者从库已经删除.解决方案:stop slave;set global sql_slave ...
- 使用meta实现页面的定时刷新或跳转
<meta http-equiv="refresh" content="5"> 这个表示当前页面每5秒钟刷一下,刷一下~ <meta http ...
- (转)Bootstrap3 概述
http://blog.csdn.net/duruiqi_fx/article/details/53285607 注意:HTML5 文档类型 Bootstrap 使用到的某些 HTML 元素和 CSS ...
- 企业级任务调度框架Quartz(4) 多个job实例注册到任务调度器上
前序: 在第一个例子我看到了自定义的作业类在任务调度器上注册后,则通过任务调度器来实现启动:下面,我们将同一个作业类执行两个任务,并都将他们注册到任务调度器上! 首先一个job类指向两 ...
- centos7 redmine安装过程(转载)
redmine 部署过程 redmin官方文档写的太烂加上不熟悉ruby搞了半天,回到家后觉得还是记录下好,希望可以帮助有需要的人,少走弯路. 版本说明 下面的版本很重要redmine 版本 3.3 ...
- JS 样式叠加显示
<!DOCTYPE html> <html> <head> <meta charset="UTF-8"> <title> ...
- day22 包,相对/绝对路径
目录 包 包被导入时发生的三件事 为什么要有包 相对路径 绝对路径 包 包是一个文件夹,也是一个模块,只是为了区分单个文件的模块,称之为包.因为单纯的文件夹无法作为模块,文件夹内的__init__.p ...
- Ajax发送GET和POST请求案例
使用ajax实现菜单联动 通常情况下,GET请求用于从服务器上获取数据,POST请求用于向服务器发送数据. 需求:选择第一个下拉框的值,根据第一个下拉框的值显示第二个下拉框的值 首先使用GET方式. ...