ROS-SLAM-自主导航
前言:无。
前提:已下载并编译了相关功能包集,如还未下载,可通过git下载:https://github.com/huchunxu/ros_exploring.git
一、启动仿真环境
cd ~/catkin_ws/src/robot_mrobot/mrobot_gazebo/launch roslaunch mrobot_laser_nav_gazebo.launch
二、启动slam导航
cd ~/catkin_ws/src/robot_mrobot/mrobot_navigation/launch roslaunch exploring_slam_demo.launch
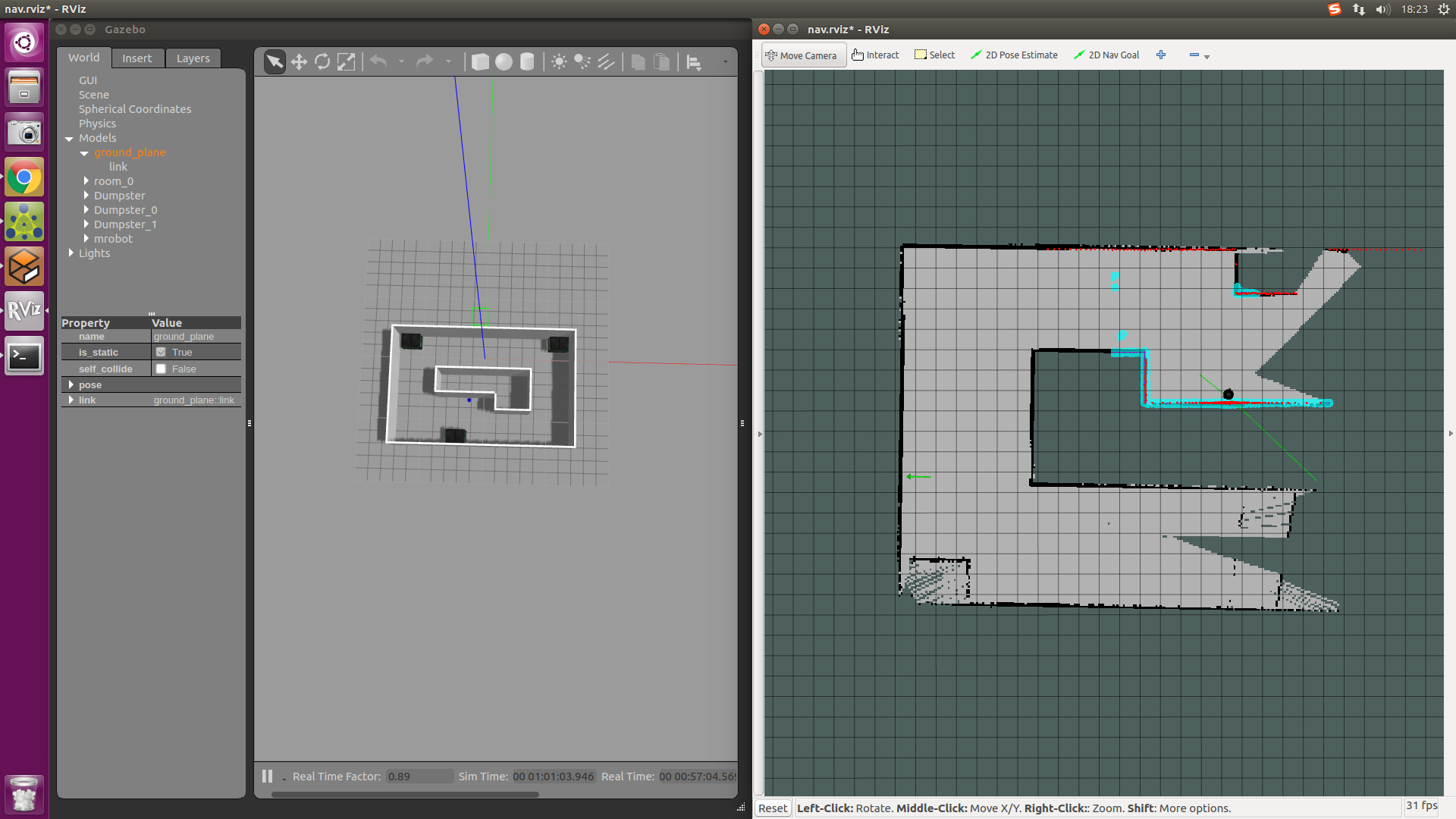
三、手动探索
使用rviz的“2D nav goal”手动选择目的地,机器人开始导航,同时使用mapping算法实时构建地图。
效果如下;

如果多次尝试无果,机器人最终会放弃,终端里将看到错误提示。
四、自动slam导航
rosrun mrobot_navigation random_navigation.py
----------------------------------
显示如下:
-END-
ROS-SLAM-自主导航的更多相关文章
- 入门ROS教程与视频汇总(kinetic)
参考网址: Richard Wang 3 Shawn Chen 部分视频网址: http://v.youku.com/v_show/id_XMjUxMTc5MzE5Mg http://i.you ...
- SLAM+语音机器人DIY系列:(二)ROS入门——7.理解tf的原理
摘要 ROS机器人操作系统在机器人应用领域很流行,依托代码开源和模块间协作等特性,给机器人开发者带来了很大的方便.我们的机器人“miiboo”中的大部分程序也采用ROS进行开发,所以本文就重点对ROS ...
- SLAM+语音机器人DIY系列:(二)ROS入门——10.在实际机器人上运行ROS高级功能预览
摘要 ROS机器人操作系统在机器人应用领域很流行,依托代码开源和模块间协作等特性,给机器人开发者带来了很大的方便.我们的机器人“miiboo”中的大部分程序也采用ROS进行开发,所以本文就重点对ROS ...
- 【ros】rplidar Hector Slam
想用rplidar跑一下hector slam,在网上发现了几个教程写的都不错,但是亲测发现都有点不足,综合了一下,进行补充. 1. 安装ros 和 创建工作空间 http://blog.csdn.n ...
- implement Google's Open Source Slam "Cartographer" demos in ROS/rviz
Cartographer is a backpack equipped with Simultaneous Localization and Mapping (SLAM) technology. 1. ...
- ROS_Kinetic_27 在ROS中使用Cartographer进行SLAM
ROS_Kinetic_27 在ROS中使用Cartographer进行SLAM Cartographer是谷歌新開源的通用的2D和3D定位與構圖同步的SLAM工具,並提供ROS接口. 论文Real- ...
- Learning ROS for Robotics Programming Second Edition学习笔记(十) indigo Gazebo rviz slam navigation
中文译著已经出版,详情请参考:http://blog.csdn.net/ZhangRelay/article/category/6506865 moveit是书的最后一章,由于对机械臂完全不知,看不懂 ...
- Learning ROS for Robotics Programming Second Edition学习笔记(三) indigo rplidar rviz slam
中文译著已经出版,详情请参考:http://blog.csdn.net/ZhangRelay/article/category/6506865 Learning ROS for Robotics Pr ...
- SLAM+语音机器人DIY系列:(二)ROS入门——1.ROS是什么
摘要 ROS机器人操作系统在机器人应用领域很流行,依托代码开源和模块间协作等特性,给机器人开发者带来了很大的方便.我们的机器人“miiboo”中的大部分程序也采用ROS进行开发,所以本文就重点对ROS ...
- SLAM+语音机器人DIY系列:(二)ROS入门——2.ROS系统整体架构
摘要 ROS机器人操作系统在机器人应用领域很流行,依托代码开源和模块间协作等特性,给机器人开发者带来了很大的方便.我们的机器人“miiboo”中的大部分程序也采用ROS进行开发,所以本文就重点对ROS ...
随机推荐
- css3实现3D切割轮播图案例
<!DOCTYPE html> <html> <head lang="en"> <meta charset="UTF-8&quo ...
- hdu1507 最大匹配
题目大意: 在 n*m在矩阵中,有一些点被标记为黑色,问可以多少对相邻的没有重复的白色块. 思路: 看上去与二分匹配毫无关系.但是没有其他好的解法,转化为二分匹配是正解.二分匹配的条件是{X,Y|E} ...
- hdu 2489 dfs枚举组合情况+最小生成树
大家都说,搜索是算法的基础.今天最这题就有体会了.在n个顶点里选择m个顶点,求最小生成树.用到了深搜的回溯.所有情况都能枚举. #include<iostream> #include< ...
- 谷歌C++编程为何禁止缺省参数
C++的缺省参数尽量不要使用,结果可能出乎我们的意料,下面的程序大家看看输出结果是多少? ) cout << num << endl; ...
- JavaScript数组操作函数
A: 购物车会有这样的情况,购物车是一个数组,每一个商品是一个对象,分别对应一个id,和一个num ,然后改变商品的时候需要和购物车对比,如果购物车中有这个商品的话,就只改变这个商品对应的id的num ...
- 洛谷P1120 小木棍 [数据加强版]搜索
玄学剪支,正好复习一下搜索 感觉搜索题的套路就是先把整体框架打出来,然后再一步一步优化剪枝 1.从maxv到sumv/2枚举长度(想一想,为什么) 2. 开一个桶,从大到小开始枚举 3. 在搜索中,枚 ...
- 序列模型(5)-----双向神经网络(BRNN)和深层循环神经网络(Deep RNN)
一.双向循环神经网络BRNN 采用BRNN原因: 双向RNN,即可以从过去的时间点获取记忆,又可以从未来的时间点获取信息.为什么要获取未来的信息呢? 判断下面句子中Teddy是否是人名,如果只从前面两 ...
- 代码检查工具sonarqube介绍及使用
亲测有效 环境:springboot+gradle+jdk1.8+sonarqube7.4 一.说明: SonarQube为静态代码检查工具,采用B/S架构,帮助检查代码缺陷,改善代码质量,提高开发速 ...
- [长期更新]模板&算法学习情况
这里仅作为自我检查用,模板代码请移步其他博文 标+的表示已学完,标?的表示需要进一步学习,标-的表示有计划但未开始学习,标*的表示暂时没有计划学习 数学 ?BSGS +FFT&NTT ?Luc ...
- 【XSY3347】串后缀
原题:2018 ICPC Asia-East Continent Final J 想看原题解的可以去看吉老师的直播题解 题意: 题解: (dllca膜你赛搬原题差评) 考虑题目中给出的式子的含义,实际 ...