ROS计算图级
上一节说到一个 package 可以包含多个可执行文件(节点),可执行文件需要被运行,就要了解ROS的通信架构,也就是计算图级,例:

小萝卜机器人拥有驱动系统,感知系统,控制系统等,要让它从指定位置到另一位置一定得启动多个节点,计算图级展示了 ROS 如何对这些节点进行管理和通信的。
计算图级结构如下:
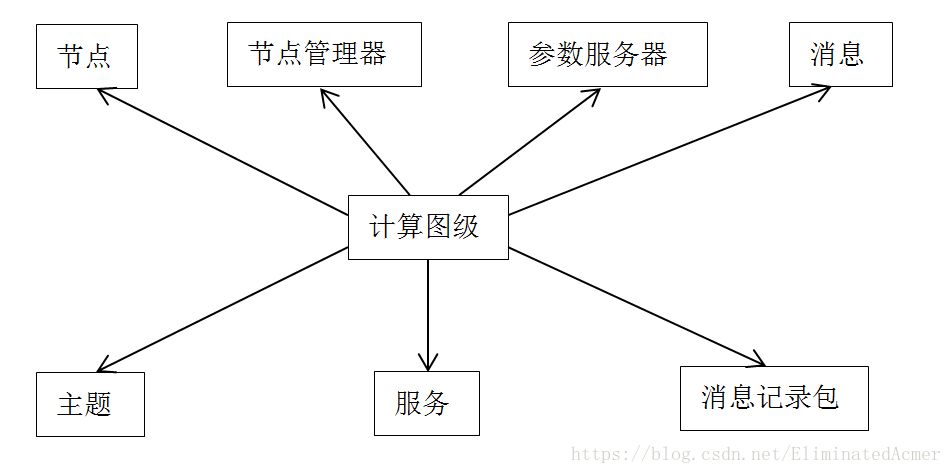
节点管理器(master)和节点(node)
在 ROS 中要管理节点和进程,需要一个节点管理器,它的名称是 master,它的存在有两个作用:
1.每个节点启动时都必须向它注册
2.master管理节点(node)间的通信
因此,在启动节点前,需要使用 roscore 命令启动 master,roscore 还顺带启动了 rosout(日志输出) 和 parameter server(参数服务器)
rosout 也是一个节点,负责记录当前系统中的 error 或 warning 信息,parameter server 则是做一些参数配置。
这里再介绍一下节点(node),一个 node 就是一个进程,进程就是程序的一次执行,因此节点只是 ROS 对进程的专有称呼,接下来介绍一些实例:
首先安装一个模拟器,用你使用的ROS发行版本名称(例如electric、fuerte、groovy、hydro等)替换掉'<distro>'
sudo apt-get install ros-<distro>-ros-tutorials开启一个终端,运行
roscore新开一个终端,运行
rosnode list会看到

只有 roscore 启动的日志输出节点,用
rosnode info /rosout查看特定节点信息

接下来运行节点,用 rosrun 命令
命令格式:rosrun [package_name] [node_name]rosrun turtlesim turtlesim_node出现
此时新开一个终端,再次运行 rosnode list

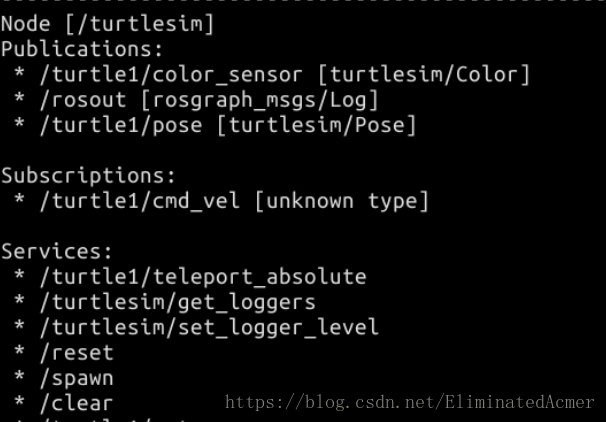
发现多了一个节点,再用 rosnode info /turtlesim
一个节点可以利用 rosrun + 包名 + 节点名,但是如果有几十个几百个呢?这时候 ROS 提供了一个更简单的方法——roslaunch。上一节说到 pkg 下面存放有 launch 文件,这个文件就是 roslaunch 所要运行的文件,因此,roslaunch + 包名 + launch名 就可以启动 master 和 多个节点。
roslaunch 在启动节点前会检测系统是否已经启动 master ,如果没有,它会自动开启 master。
launch 文件写法如下:

通信方式
ROS提供了 主题(topic),服务(service),参数服务器(parameter service) 和动作库(actionlib) 这四种通信方式。
1.topic 通信方式和message
两个节点需要通信,需要先定义一个共同的话题,就像这样

node 之间通过 publish - subscribe 方式通信。即节点 A 通过 topic 发布消息,节点 B 通过 topic 订阅消息。
一个节点可以发布多个话题,一个话题可以订阅多个话题。
举个例子:
在刚才的小乌龟的例子中,新开一个终端,运行这个节点
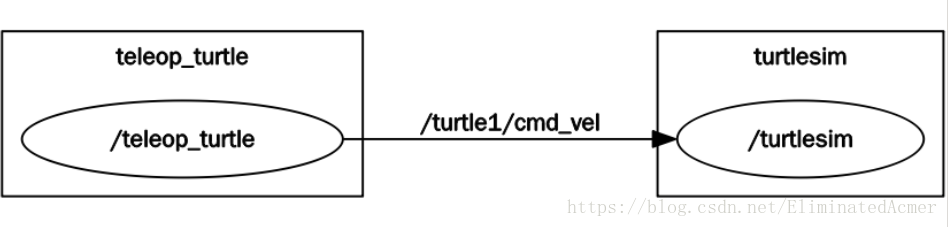
rosrun turtlesim turtle_teleop_key它可以让你用方向键来控制小乌龟的运动,再开一个终端,安装如下软件:
sudo apt-get install ros-indigo-rqt
sudo apt-get install ros-indigo-rqt-common-plugins再运行
rosrun rqt_graph rqt_graph可以看到以下结果
message
message 是 topic 内容的数据类型,定义在 *.msg 文件中。message 可以理解为 C++ 中的int,float,类等,它的数据类型有如下:

常用命令:
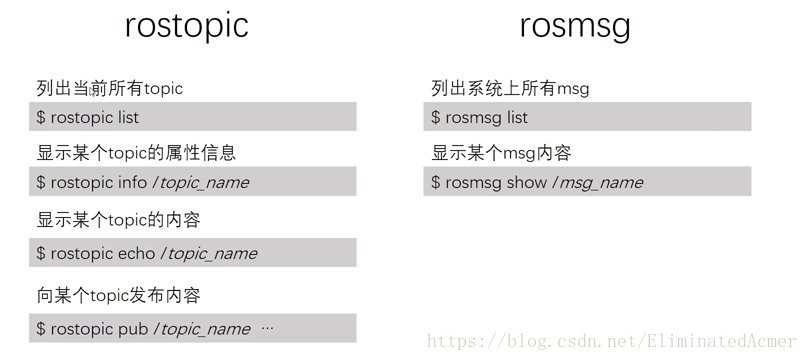
2.service 通信方式
topic 通信方式是异步通信,比如现在有两个检测路障的节点,节点 A 发布路况信息,节点 B 检测,如果是用 topic 通信方式,那么节点 B 会一直订阅话题,可是有效的订阅是检测到路障,因而这种方式会浪费大量的计算资源。而 service 通信方式则实现了同步通信,它会解决这一问题。
service 通信方式中,两个节点之间的通信方式是request - reply 方式。

和 topic 想似,srv 是 service 通信方式的数据格式,定义在 *.srv 文件中。
常用命令:

3.parameter service 参数服务器
参数服务器维护一个存储着各种参数的字典,字典就是为了方便读写一些不常改变的参数,给它们加上索引,这个索引是唯一的。

其中 rosparam load 后面的文件必须遵从 yaml 格式

通俗的说就是 key : 键值 。
4.Action 通信方式
在 service 通信方式中,client 发出请求后,会进入阻塞状态,直到 server 完成了请求,才转而继续运行,在这期间,server 端究竟是在完成别的任务还是 server 也进入阻塞状态,无法知晓。因此,action 是在 service 基础上改进的通信方式。
action 通信过程中,server 会带有一个状态反馈,
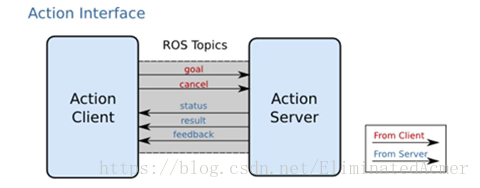
发送的请求有 目标,取消目标,回传的信息有 状态,任务完成后的结果,实时状态。
通常用在 长时间(导航,机械臂运动),可抢占(可被打断)的任务。
和 topic,service 相似,action 是 action 通信方式的数据格式,定义在 *.action 文件中。
关于计算图级的更详细介绍会在后续文章中更新。
ROS计算图级的更多相关文章
- ROS文件系统级
ROS的安装就不介绍了,官方教程是最好的:点击打开链接 ROS是机器人操作系统,它应该有自己的工程结构,Linux系统的文件系统如下: 而ROS的文件系统级如下: 接下来逐一介绍它们: 1. catk ...
- ROS学习笔记二:ROS系统架构及概念
本文主要是了解ROS的系统架构.文件夹结构以及工作所需的核心文件. ROS系统架构主要被设计和划分为三部分,每一部分代表一个层级的概念:文件系统级(The filesystem level).计算图级 ...
- 机器人操作系统(ROS)教程4:ROS的框架【转】
转自:http://www.arduino.cn/thread-11351-1-1.html 在进行ROS的代码开发前,有必要了解一些ROS的概念.首先,ROS的系统代码分为两部分:main和univ ...
- ROS初探:(一)ROS架构
一.ROS架构 ROS架构上分为三个层级: 计算图级(Computation Graph level):体现进程与系统的关系,描述系统怎么运行. 文件系统级(Filesystem level):组织构 ...
- (二)ROS系统架构及概念 ROS Architecture and Concepts 以Kinetic为主更新 附课件PPT
第2章 ROS系统架构及概念 ROS Architecture and Concepts PPT说明: 正文用白色,命令或代码用黄色,右下角为对应中文译著页码. 这一章需要掌握ROS文件系统,运行图级 ...
- ROS机器人程序设计(原书第2版)补充资料 (贰) 第二章 ROS系统架构及概念
ROS机器人程序设计(原书第2版)补充资料 (贰) 第二章 ROS系统架构及概念 书中,大部分出现hydro的地方,直接替换为indigo或jade或kinetic,即可在对应版本中使用. 由于工作事 ...
- SLAM+语音机器人DIY系列:(二)ROS入门——2.ROS系统整体架构
摘要 ROS机器人操作系统在机器人应用领域很流行,依托代码开源和模块间协作等特性,给机器人开发者带来了很大的方便.我们的机器人“miiboo”中的大部分程序也采用ROS进行开发,所以本文就重点对ROS ...
- ROS学习手记 9 -- 阶段性复习
ROS 阶段性总结 1. 基本概念 ROS 是建立在Linux特别是Ubuntu系统上的一套软件系统,它具有操作系统的特征 ,负责管理各个模块的协同运行.设计初衷主要是面向机器人软硬件开发的特点:多 ...
- ROS知识(2)----理解ROS系统结构
学习新事物,方法高于技术本身,如果没有把握"BIG PICTURE"的话很难理解进去.通过以下几点进行理解ROS: ROS实际上不是操作系统,他只是一个通信的框架,一个代码管理的架 ...
随机推荐
- UOJ220 [NOI2016] 网格 【割顶】【并查集】
题目分析: 答案显然只有{-1,0,1,2}四种. 对于答案等于-1的情况,只有两种情况,一种是只剩一只跳蚤,另一种是只剩两只跳蚤且他们四连通,这个很好判. 对于答案等于0的情况,那说明联通块大于1, ...
- 编写Postgres扩展之三:调试
原文:http://big-elephants.com/2015-10/writing-postgres-extensions-part-iii/ 编译:Tacey Wong 在上一篇关于编写Post ...
- robot framework 的关键字Continue For Loop 用法
Continue For Loop关键字就是python的continue的意思,跳出本层循环,继续执行下一个循环. 我先举个栗子: :FOR ${index} IN RANGE 5 ...
- JS 客户端(浏览器)存储数据之 localStorage、sessionStorage和indexDB
基本概念 1.localStorage和sessionStorage是HTML5 Web存储的提供的两种存储方式,在IE7以上以及大多数浏览器都是支持的 2.localStorage和sessionS ...
- Java 之 Properties类 属性集
一.概述 java.util.Properties集合 extends Hashtable<k,v> implements Map<k,v> java.util.Propert ...
- input 框自动检测输入是否为数字
最近做一个公众号,我这个菜鸡不得不学习很多东西,谁让老师要我一个人做这个项目呢? 好,进入正题,因为菜,所以很菜,但是百度很厉害啊,谁让我不好意思问老师,而且我也觉得问这么小的问题,太难以启齿.. 因 ...
- CentOS7安装CDH 第九章:CDH中安装Kafka
相关文章链接 CentOS7安装CDH 第一章:CentOS7系统安装 CentOS7安装CDH 第二章:CentOS7各个软件安装和启动 CentOS7安装CDH 第三章:CDH中的问题和解决方法 ...
- 第一篇:python简介
前言:作为对于python小白而言,我们需要知道什么是python,为什么学习python而不是其他编程语言,它相比于其他语言有什么优势,同时了解python 的执行操作过程又是怎么样的,它有哪些分类 ...
- linux alsa音频中采样率fs、比特率BCLK 、主时钟MCLK关系
转:https://blog.csdn.net/lugandong/article/details/72468831 一.拿512fs说话: 看图知道采样的位深是32bit(位),左右声道各占了8*3 ...
- css详解2
1.伪类选择器 1.1.a标签的爱恨准则 LoVe HAte .一个冒号连接 1.2.a标签的示例 给a标签设置个颜色,生效了 <html lang="en"> < ...