ros下多机器人系统(1)
multi-robot system
经过两个多月的ros学习,对ros的认识有了比较深入的了解,本篇博客主要记录在ros下开发多机器人系统以及对ros更深入的开发。本篇博客是假定读者已经学习完了全部ros tutorials的
Beginner Level 和 Intermediate Level 。
目录:
同一电脑运行多机器人节点
现在我们开始尝试运行两个相同的turtlesim节点(nodes),打开三个运行如下命令:
roscore
rosrun turtlesim turtlesim_node
rosrun turtlesim turtlesim_node
得到的结果如下:
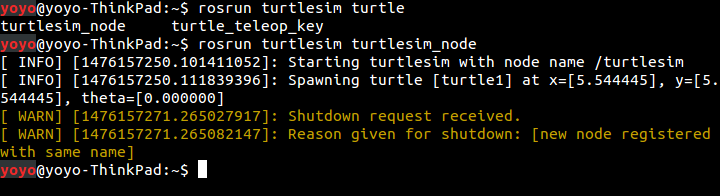
第一次运行的turtlesim_node 被终止了。ros不允许相同名字的节点同时运行,如果第二个节点运行,第一个会被自动终结。
参数重映射(Remapping Arguments):一个节点中的任何ROS名称可以在命令行重映射,这是ROS中的一个非常重要且强大的特征。
有了这个特征,我们就可以实现在同一台电脑中控制多个节点做不同的事了:
如果要同时运行多个节点的话,是一定要改名字的,一下介绍两种改名字的方法:
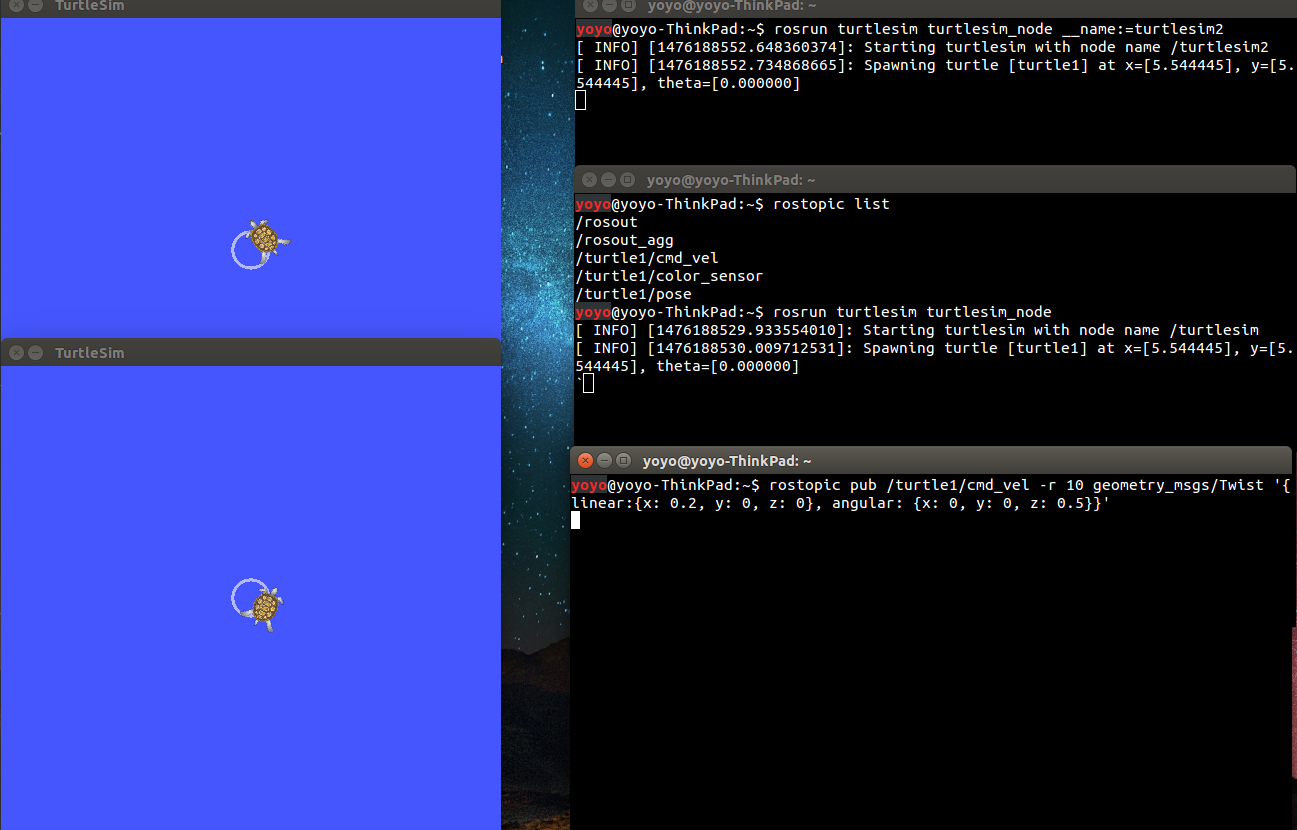
第一种:直接在命令行改名字
更改第二个命令:
rosrun turtlesim turtlesim_node __name:=turtlesim2
再运行:
rostopic pub /turtle1/cmd_vel -r 10 geometry_msgs/Twist '{linear:{x: 0.2, y: 0, z: 0}, angular: {x: 0, y: 0, z: 0.5}}'
现在可以实现同时控制两个turtlesim_node了

第二种:使用launch文件
创建 multi_turtlesim.launch
<launch>
<group ns="sim1">
<node name="turtle" pkg="turtlesim" type="turtlesim_node"/>
<node name="controller" pkg="turtlesim" type="draw_square"/>
</group>
<group ns="sim2">
<node name="turtle" pkg="turtlesim" type="turtlesim_node"/>
<node name="controller" pkg="turtlesim" type="draw_square"/>
</group>
</launch>
我们直接在launch文件中更改了节点的namespaces,运行rqt_graph可以更直接的看到我i们的修改:

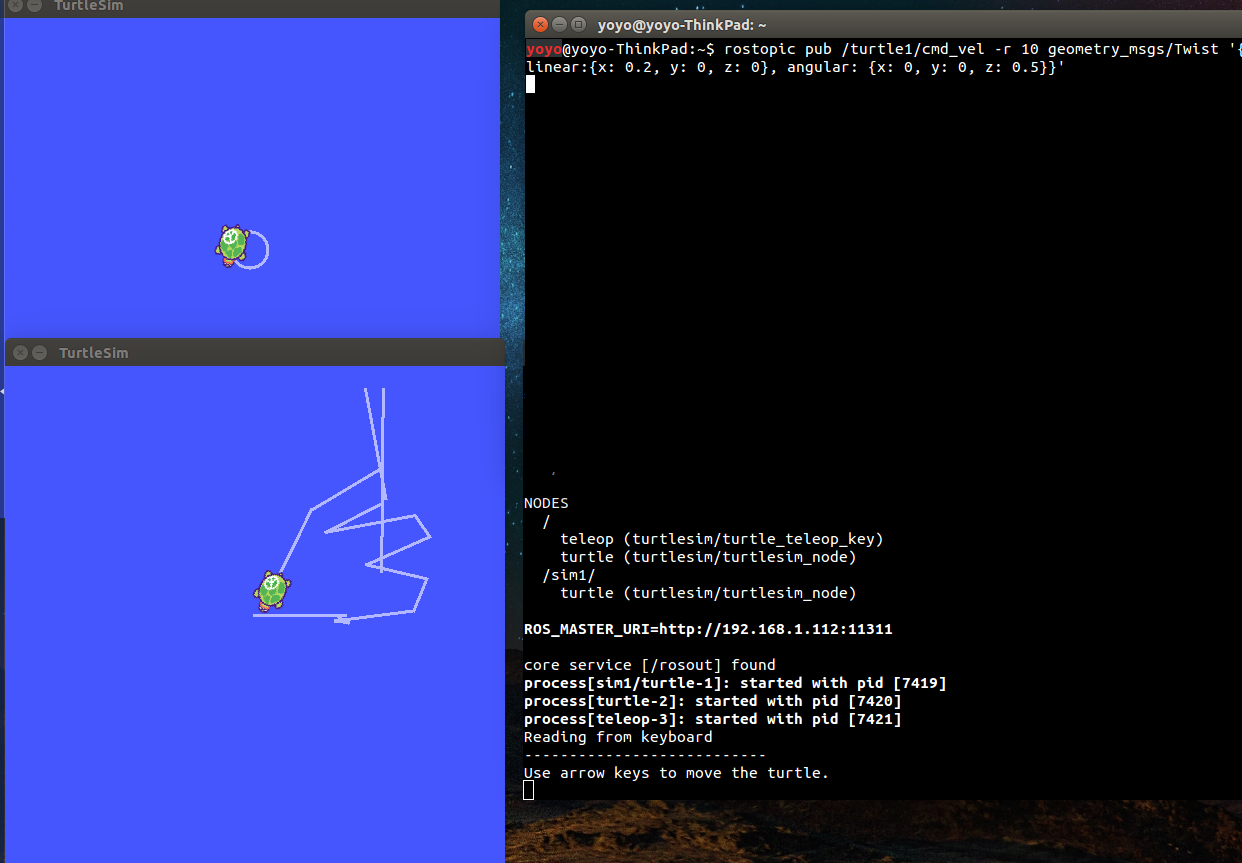
如果要实现多个节点受不同的控制,创建 remapping_turtlesim.launch ,并运行:
<launch>
<group ns="sim1">
<node name="turtle" pkg="turtlesim" type="turtlesim_node"/>
</group>
<group >
<node name="turtle" pkg="turtlesim" type="turtlesim_node"/>
</group>
<node pkg="turtlesim" name="teleop" type="turtle_teleop_key" output="screen">
<remap from="/turtle1/cmd_vel" to="/sim1/turtle1/cmd_vel"/>
</node>
</launch>
这里,我们将 topic /turtle1/cmd_vel 改成 /sim1/turtle1/cmd_vel,
再运行:
rostopic pub /turtle1/cmd_vel -r geometry_msgs/Twist '{linear:{x: 0.2, y: 0, z: 0}, angular: {x: 0, y: 0, z: 0.5}}'
现在我们可以发现,其中一只turtle在转圈,而另外一只受键盘控制。
不同电脑在同一roscore下运行多机器人节点
上面我们已经能在同一电脑中实现多机器人的控制了,接下来,我们将实现在不同电脑中实现多机器人的控制。
首先,准备两台电脑并确保在同一wifi下,然后运行 ifconfig
假设得到的结果为:
192.168.1.151 (machine A)
192.168.1.154 (machine B)
然后,在machine B 上运行:
ping 192.168.1.151
如果有返回,则可以实现两台电脑的通信。
现在,我们以machine A为主机建立多机器人系统。
然后再在machine A的 .bashrc 中添加:
function get_ip_address { ifconfig | fgrep -v 127.0.0.1 | fgrep '掩码:255.255.255.0' | egrep -o '地址:[^ ]*' | sed 's/^.*://'; }
export ROS_IP=$( get_ip_address )
在machine B的 .bashrc中添加:
function get_ip_address { ifconfig | fgrep -v 127.0.0.1 | fgrep '掩码:255.255.255.0' | egrep -o '地址:[^ ]*' | sed 's/^.*://'; }
export ROS_IP=$( get_ip_address )
export ROS_MASTER_URI=http://192.168.1.151:11311
现在,可以实现多电脑的机器人通信了:
在 machine A中运行:roscore
在 machine A中运行:turtlesim 节点
在 machine B中运行:turtlesim2节点
在 machine B中运行:teleop_key 节点
完成上述步骤后,你就会发现,我们可以同时控制A与B两个turtlesim 节点了。
下一篇介绍:
在下一篇中,我们将实现在模拟环境下的多机器人协作,防止机器人之间的碰撞,机器人的同步,以及自定义消息的创建。
ros下多机器人系统(1)的更多相关文章
- Ubuntu与ROS的Docker桌面系统与ROS在线练习课程(在线Linux虚拟机)
ROS在线练习课程正在逐步完善中,目前以ROS官网中文资料制作,可参考: https://www.shiyanlou.com/courses/854 邀请码 U23ERF8H 安装Ubuntu+RO ...
- ZED 相机 && ORB-SLAM2安装环境配置与ROS下的调试
注:1. 对某些地方进行了更新(红色标注),以方便进行配置. 2. ZED ROS Wrapper官方github已经更新,根据描述新的Wrapper可能已经不适用与Ros Indigo了,如果大家想 ...
- ROS中3D机器人建模(一)
一,机器人建模的ROS软件包 *urdf : 机器人建模最重要的ros软件包是urdf软件包.这个软件包包含一个用于统一机器人描述格式(URDF)的C++解析器,它是一个表示机器人模型的XML文件,还 ...
- UEFI+GPT模式下的Windows系统中分区结构和默认分区大小及硬盘整数分区研究
内容摘要:本文主要讨论和分析在UEFI+GPT模式下的Windows系统(主要是最新的Win10X64)中默认的分区结构和默认的分区大小,硬盘整数分区.4K对齐.起始扇区.恢复分区.ESP分区.MSR ...
- LSD-SLAM深入学习(1)-基本介绍与ros下的安装
前言 借鉴来自RGB-D数据处理的两种方法-基于特征与基于整体的,同样可以考虑整个图片的匹配,而不是只考虑特征点的…… 一般这种稠密的方法需要很大的计算量,DTAM: Dense tracking a ...
- Hyper-V下安装Ossim系统
WindowsServer2008Hyper-V下安装Ossim系统 背景:很多朋友在用Hyper-v安装Linux的时候总是抱怨速度很慢,而且装好了系统无法识别网卡,可实际上针对网卡的问题本文提出了 ...
- VM下的linux系统上不了网?? 使用putty远程登录不上linux的解决方法?
背景:昨晚想尝试一下用putty远程登录我的linux系统,悲剧的是,我竟然连接不上,显示 connection refused ,连接被拒绝.于是我就想看看能不能在linux下看看能不能访问百度 ...
- Windows系统下远程Linux系统
Windows系统下远程Linux系统 工具:Xmanager 启动界面: 配置保存路径(win7): C:\Users\Administrator\AppData\Roaming\NetSarang ...
- 1、win10下连接本地系统上的Linux操作系统(分别以Nat方式和桥接模式实现)
1.win10下连接本地系统上的Linux操作系统(分别以Nat方式和桥接模式实现) 一.准备知识:win10下打开Administrator的方式 在win10操作系统中,Administrator ...
随机推荐
- post请求接口
/// <summary> /// post 调用接口 /// </summary> /// <param name="xmlRequest"> ...
- 关于nagios监控远程服务器对服务器性能影响的测试
1. Nagios监视远程服务器时,是通过在控制端执行以下命令进行数据收集的: /usr/local/nagios/libexec/check_http -I 192.168.16.11 /us ...
- SVN-修改已提交的日志
前提:服务器是Windows下的VisualSVN Server 1.在库的属性页面的Hooks选项卡下找到Pre-revision property change hook,2.双击修改其内容,具体 ...
- C# POST请求
public string PostWebRequest(string postUrl, string paramData, Encoding dataEncode) { string ret = s ...
- java 的SPI机制
今天看到spring mvc 使用Java Validation Api(JSR-303)进行校验,需要加载一个 其具体实现(比如Hibernate Validator), 本来没有什么问题,但是突然 ...
- 关于$.fn.*的使用
这个案例是我封装了一个树形插件,也是别人写好的,但是对于我来说调用起来不是很方便,就对他的初始化方法又进行了一次封装,总的来说显得比较麻烦,不过我是新手嘛 DEMO 封装一个jcTree的方法$.fn ...
- MySQL数据库免安装版配置
参考文章: http://www.bkjia.com/Mysql/1093427.html
- Android Studio使用org.apache.http报错
Android Studio使用org.apache.http报错需要加上这句话:useLibrary 'org.apache.http.legacy'
- Visual Studio 2010 插件之Resharper
这一系列不是对每个功能的中文帮助,而是我对开发中可能涉及的功能需求,利用Resharper来完成.有些是Visual Studio有的,但是做的不好,有些是没有而Resharper发明的.总的目的都只 ...
- 04-JAVA中的类和对象
1. Foo对构造函数进行了重载,那么默认的构造函数就不会被使用,在主类中,定义对象的时候,引用构造函数,却没有参数,自然无法通过编译. 2. 当设定字段初始值在初始化块前面的时候, 很明显使用了前者 ...