吴恩达深度学习笔记(五) —— 优化算法:Mini-Batch GD、Momentum、RMSprop、Adam、学习率衰减
主要内容:
一.Mini-Batch Gradient descent
二.Momentum
四.RMSprop
五.Adam
六.优化算法性能比较
七.学习率衰减
一.Mini-Batch Gradient descent
1.一般地,有三种梯度下降算法:
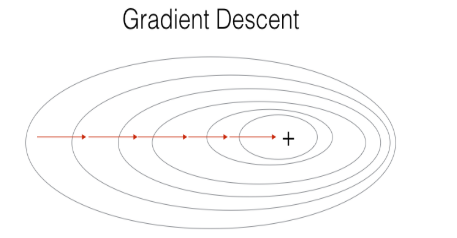
1)(Batch )Gradient Descent,即我们平常所用的。它在每次求梯度的时候用上所有数据集,此种方式适合用在数据集规模不大的情况下。
X = data_input
Y = labels
parameters = initialize_parameters(layers_dims)
for i in range(0, num_iterations):
# Forward propagation
a, caches = forward_propagation(X, parameters)
# Compute cost.
cost = compute_cost(a, Y)
# Backward propagation.
grads = backward_propagation(a, caches, parameters)
# Update parameters.
parameters = update_parameters(parameters, grads)
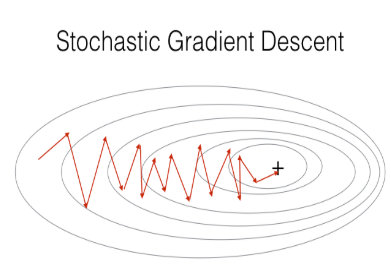
2)Stochastic Gradient Descent,它在每次求梯度的时候只用上一个数据,无疑,这种方式对噪声敏感,且梯度的方向往往偏离较大。
X = data_input
Y = labels
parameters = initialize_parameters(layers_dims)
for i in range(0, num_iterations):
for j in range(0, m):
# Forward propagation
a, caches = forward_propagation(X[:,j], parameters)
# Compute cost
cost = compute_cost(a, Y[:,j])
# Backward propagation
grads = backward_propagation(a, caches, parameters)
# Update parameters.
parameters = update_parameters(parameters, grads)
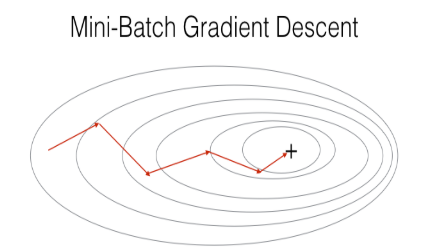
3)Mini-Batch Gradient Descent,就是是在计算梯度时,仅仅利用数据集中的一部分,而不是全部。这样在忽略了梯度准确性的代价下,提升了梯度下降收敛的速度。mini-batch适合用在数据集规模庞大的时。由此可知,min-batch gradient descent 在 batch gradient descent 和 stochastic gradient descent 这两个极端之前采取了折衷的方式,这样既考虑到了梯度的精确性,又考虑到了训练速度,或许这就是中庸之道。
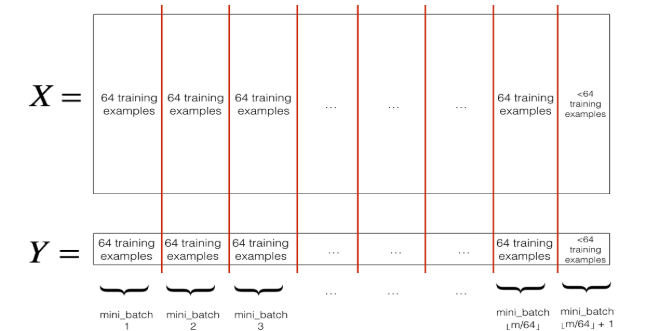
2.执行min-batch gradient descent之前,需要对数据集进行两步操作
1)Shuffle,即打乱数据集的顺序,以此保证数据集随机地分配到mini-batches中。
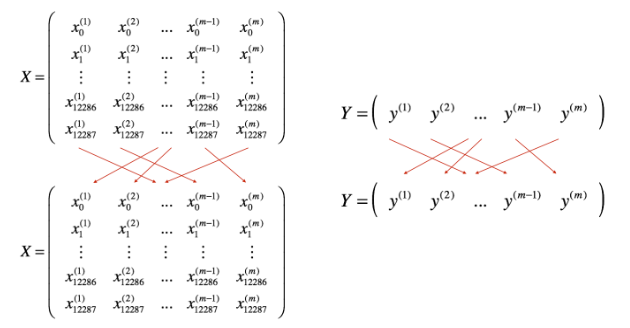
2)Partition,即把数据集分成多个大小相等batches,由于数据集大小可能不被batch size整除,所以最后一个batch的大小可能小于batch size。
代码如下:
# GRADED FUNCTION: random_mini_batches def random_mini_batches(X, Y, mini_batch_size = 64, seed = 0):
"""
Creates a list of random minibatches from (X, Y) Arguments:
X -- input data, of shape (input size, number of examples)
Y -- true "label" vector (1 for blue dot / 0 for red dot), of shape (1, number of examples)
mini_batch_size -- size of the mini-batches, integer Returns:
mini_batches -- list of synchronous (mini_batch_X, mini_batch_Y)
""" np.random.seed(seed) # To make your "random" minibatches the same as ours
m = X.shape[1] # number of training examples
mini_batches = [] # Step 1: Shuffle (X, Y)
permutation = list(np.random.permutation(m))
shuffled_X = X[:, permutation]
shuffled_Y = Y[:, permutation].reshape((1,m)) # Step 2: Partition (shuffled_X, shuffled_Y). Minus the end case.
num_complete_minibatches = math.floor(m/mini_batch_size) # number of mini batches of size mini_batch_size in your partitionning
for k in range(0, num_complete_minibatches):
### START CODE HERE ### (approx. 2 lines)
mini_batch_X = shuffled_X[:,k*mini_batch_size:(k+1)*mini_batch_size]
mini_batch_Y = shuffled_Y[:,k*mini_batch_size : (k+1)*mini_batch_size]
### END CODE HERE ###
mini_batch = (mini_batch_X, mini_batch_Y)
mini_batches.append(mini_batch) # Handling the end case (last mini-batch < mini_batch_size)
if m % mini_batch_size != 0:
### START CODE HERE ### (approx. 2 lines)
mini_batch_X = shuffled_X[:,num_complete_minibatches*mini_batch_size:]
mini_batch_Y = shuffled_Y[:,num_complete_minibatches*mini_batch_size:]
### END CODE HERE ###
mini_batch = (mini_batch_X, mini_batch_Y)
mini_batches.append(mini_batch) return mini_batches
二.Momentum
1.由于min-batch GD在一次迭代求梯度时,只是用了部分数据集,这就不可避免地导致了梯度出现了偏差(因为掌握的信息不足以作出最明智的选择),由此使得在梯度下降的过程中出现了轻微震荡,如下图在纵向出现了震荡,而momentum可以很好地解决这个问题。
2.momentum的核心思想就是指数加权平均,最通俗的解释就是:在求当前的梯度时,把前面一部分的梯度也考虑进来,然后通过权值计算求和,最终确定当前的梯度。与普通gradient descent的每次求梯度都是相互独立的不同,momentum对于当前的梯度加入了“经验”的元素,且如果某一轴出现了震荡,那么“正反经验”相互抵消,慢慢地梯度方向也趋于平滑,最终达到消除震荡的效果。
3.那如何用数学表达式去实现momentum呢?如下:
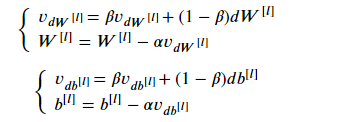
这里引入了v变量,即velocity速度的缩写。那么这个变量与速度又有什么关联?这里或许可以用物理的思想去考虑:dW就是加速度、vdW就是速度。由第一条式子可知,vdW的当前值受到原始速度vdW和加速度dW的加权影响,这样vdW就综合了两者的因素。然后在看第二个式子:W减去学习率乘以vdW,而vdW就是“过往经验”和“当前情况”的综合考虑。
代码如下(v可初始化为0,超级参数 β 一般设置为0.9):
# GRADED FUNCTION: update_parameters_with_momentum def update_parameters_with_momentum(parameters, grads, v, beta, learning_rate):
"""
Update parameters using Momentum Arguments:
parameters -- python dictionary containing your parameters:
parameters['W' + str(l)] = Wl
parameters['b' + str(l)] = bl
grads -- python dictionary containing your gradients for each parameters:
grads['dW' + str(l)] = dWl
grads['db' + str(l)] = dbl
v -- python dictionary containing the current velocity:
v['dW' + str(l)] = ...
v['db' + str(l)] = ...
beta -- the momentum hyperparameter, scalar
learning_rate -- the learning rate, scalar Returns:
parameters -- python dictionary containing your updated parameters
v -- python dictionary containing your updated velocities
""" L = len(parameters) // 2 # number of layers in the neural networks # Momentum update for each parameter
for l in range(L): ### START CODE HERE ### (approx. 4 lines)
# compute velocities
v["dW" + str(l+1)] = beta * v["dW" + str(l+1)] + (1-beta) * grads["dW" + str(l+1)]
v["db" + str(l+1)] = beta * v["db" + str(l+1)] + (1-beta) * grads["db" + str(l+1)]
# update parameters
parameters["W" + str(l+1)] = parameters["W" + str(l+1)] - learning_rate * v["dW" + str(l+1)]
parameters["b" + str(l+1)] = parameters["b" + str(l+1)] - learning_rate * v["db" + str(l+1)]
### END CODE HERE ### return parameters, v
3.指数加权平均的偏差修正:指数加权平均有一个问题,细看表达式: ,一般地v初始化为0,β初始化为0.9,所以v一开始是非常小的,要到后面才进入轨道。如下图,绿色曲线是理想中的曲线,但实际的曲线为紫色曲线:
,一般地v初始化为0,β初始化为0.9,所以v一开始是非常小的,要到后面才进入轨道。如下图,绿色曲线是理想中的曲线,但实际的曲线为紫色曲线:

为了解决这个问题,需要引入修正:即在计算完之后,v还有除以一个系数(1-β^t),即 v = v / (1-β^t),其中t是当前迭代次数。一开始时β^t小于1但接近于1,于是(1-β^t)就是一个比较小的数,v除以它之后,就能够增大数值,随着迭代次数t的增加β^t接近于0,v / (1-β^t) 就约等于v / 1,即在v进入轨道之后,修正就不再其作用,从而起到对前面的值有修正的作用。
四.RMSprop
1.momentum解决震荡的问题,但是所谓精益求精,我们想在距离长的一方向轴上加速,在距离短的一方向轴上减速。如下图,w轴距离长二b轴距离短:

2.根据上图,可以注意到:距离长的一轴,其斜率小(平缓);距离短的一轴,其斜率大(陡峭)。因此可以:当斜率大时,将斜率除以一个大的数;当斜率小时,反之。RMSprop的具体做法如下:

五.Adam
Adam则是moment和RMSprop的综合(且加入了修正),即能避免震荡,又能自动调速。其数学表达是:
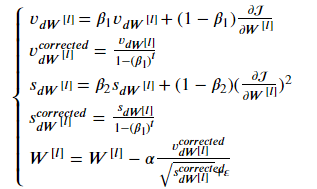

对于上面的几个超级参数,一般如下设置:

初始化v、s(一般初始化为0):
# GRADED FUNCTION: initialize_adam def initialize_adam(parameters) :
"""
Initializes v and s as two python dictionaries with:
- keys: "dW1", "db1", ..., "dWL", "dbL"
- values: numpy arrays of zeros of the same shape as the corresponding gradients/parameters. Arguments:
parameters -- python dictionary containing your parameters.
parameters["W" + str(l)] = Wl
parameters["b" + str(l)] = bl Returns:
v -- python dictionary that will contain the exponentially weighted average of the gradient.
v["dW" + str(l)] = ...
v["db" + str(l)] = ...
s -- python dictionary that will contain the exponentially weighted average of the squared gradient.
s["dW" + str(l)] = ...
s["db" + str(l)] = ... """ L = len(parameters) // 2 # number of layers in the neural networks
v = {}
s = {} # Initialize v, s. Input: "parameters". Outputs: "v, s".
for l in range(L):
### START CODE HERE ### (approx. 4 lines)
v["dW" + str(l+1)] = np.zeros( parameters["W" + str(l+1)].shape)
v["db" + str(l+1)] = np.zeros( parameters["b" + str(l+1)].shape)
s["dW" + str(l+1)] = np.zeros( parameters["W" + str(l+1)].shape)
s["db" + str(l+1)] = np.zeros( parameters["b" + str(l+1)].shape)
### END CODE HERE ### return v, s
Adam更新参数:
# GRADED FUNCTION: update_parameters_with_adam def update_parameters_with_adam(parameters, grads, v, s, t, learning_rate = 0.01,
beta1 = 0.9, beta2 = 0.999, epsilon = 1e-8):
"""
Update parameters using Adam Arguments:
parameters -- python dictionary containing your parameters:
parameters['W' + str(l)] = Wl
parameters['b' + str(l)] = bl
grads -- python dictionary containing your gradients for each parameters:
grads['dW' + str(l)] = dWl
grads['db' + str(l)] = dbl
v -- Adam variable, moving average of the first gradient, python dictionary
s -- Adam variable, moving average of the squared gradient, python dictionary
learning_rate -- the learning rate, scalar.
beta1 -- Exponential decay hyperparameter for the first moment estimates
beta2 -- Exponential decay hyperparameter for the second moment estimates
epsilon -- hyperparameter preventing division by zero in Adam updates Returns:
parameters -- python dictionary containing your updated parameters
v -- Adam variable, moving average of the first gradient, python dictionary
s -- Adam variable, moving average of the squared gradient, python dictionary
""" L = len(parameters) // 2 # number of layers in the neural networks
v_corrected = {} # Initializing first moment estimate, python dictionary
s_corrected = {} # Initializing second moment estimate, python dictionary # Perform Adam update on all parameters
for l in range(L):
# Moving average of the gradients. Inputs: "v, grads, beta1". Output: "v".
### START CODE HERE ### (approx. 2 lines)
v["dW" + str(l+1)] = beta1 * v["dW" + str(l+1)] + (1-beta1) * grads["dW" + str(l+1)]
v["db" + str(l+1)] = beta1 * v["db" + str(l+1)] + (1-beta1) * grads["db" + str(l+1)]
### END CODE HERE ### # Compute bias-corrected first moment estimate. Inputs: "v, beta1, t". Output: "v_corrected".
### START CODE HERE ### (approx. 2 lines)
v_corrected["dW" + str(l+1)] = v["dW" + str(l+1)]/(1-beta1**t)
v_corrected["db" + str(l+1)] = v["db" + str(l+1)]/(1-beta1**t)
### END CODE HERE ### # Moving average of the squared gradients. Inputs: "s, grads, beta2". Output: "s".
### START CODE HERE ### (approx. 2 lines)
s["dW" + str(l+1)] = beta2 * s["dW" + str(l+1)] + (1-beta2) * grads["dW" + str(l+1)]**2
s["db" + str(l+1)] = beta2 * s["db" + str(l+1)] + (1-beta2) * grads["db" + str(l+1)]**2
### END CODE HERE ### # Compute bias-corrected second raw moment estimate. Inputs: "s, beta2, t". Output: "s_corrected".
### START CODE HERE ### (approx. 2 lines)
s_corrected["dW" + str(l+1)] = s["dW" + str(l+1)]/(1-beta2**t)
s_corrected["db" + str(l+1)] = s["db" + str(l+1)]/(1-beta2**t)
### END CODE HERE ### # Update parameters. Inputs: "parameters, learning_rate, v_corrected, s_corrected, epsilon". Output: "parameters".
### START CODE HERE ### (approx. 2 lines)
parameters["W" + str(l+1)] = parameters["W" + str(l+1)] - learning_rate * v_corrected["dW" + str(l+1)]/(s_corrected["dW" + str(l+1)]+epsilon)**0.5
parameters["b" + str(l+1)] = parameters["b" + str(l+1)] - learning_rate * v_corrected["db" + str(l+1)]/(s_corrected["db" + str(l+1)]+epsilon)**0.5
### END CODE HERE ### return parameters, v, s
六.优化算法性能比较
接下来分别用mini-batch gradient descent 、 momentum 、 Adam 来对模型进行训练,并比较三者的性能。
模型如下(需要接收一个参数更新的方式):
# GRADED FUNCTION: update_parameters_with_adam def update_parameters_with_adam(parameters, grads, v, s, t, learning_rate = 0.01,
beta1 = 0.9, beta2 = 0.999, epsilon = 1e-8):
"""
Update parameters using Adam Arguments:
parameters -- python dictionary containing your parameters:
parameters['W' + str(l)] = Wl
parameters['b' + str(l)] = bl
grads -- python dictionary containing your gradients for each parameters:
grads['dW' + str(l)] = dWl
grads['db' + str(l)] = dbl
v -- Adam variable, moving average of the first gradient, python dictionary
s -- Adam variable, moving average of the squared gradient, python dictionary
learning_rate -- the learning rate, scalar.
beta1 -- Exponential decay hyperparameter for the first moment estimates
beta2 -- Exponential decay hyperparameter for the second moment estimates
epsilon -- hyperparameter preventing division by zero in Adam updates Returns:
parameters -- python dictionary containing your updated parameters
v -- Adam variable, moving average of the first gradient, python dictionary
s -- Adam variable, moving average of the squared gradient, python dictionary
""" L = len(parameters) // 2 # number of layers in the neural networks
v_corrected = {} # Initializing first moment estimate, python dictionary
s_corrected = {} # Initializing second moment estimate, python dictionary # Perform Adam update on all parameters
for l in range(L):
# Moving average of the gradients. Inputs: "v, grads, beta1". Output: "v".
### START CODE HERE ### (approx. 2 lines)
v["dW" + str(l+1)] = beta1 * v["dW" + str(l+1)] + (1-beta1) * grads["dW" + str(l+1)]
v["db" + str(l+1)] = beta1 * v["db" + str(l+1)] + (1-beta1) * grads["db" + str(l+1)]
### END CODE HERE ### # Compute bias-corrected first moment estimate. Inputs: "v, beta1, t". Output: "v_corrected".
### START CODE HERE ### (approx. 2 lines)
v_corrected["dW" + str(l+1)] = v["dW" + str(l+1)]/(1-beta1**t)
v_corrected["db" + str(l+1)] = v["db" + str(l+1)]/(1-beta1**t)
### END CODE HERE ### # Moving average of the squared gradients. Inputs: "s, grads, beta2". Output: "s".
### START CODE HERE ### (approx. 2 lines)
s["dW" + str(l+1)] = beta2 * s["dW" + str(l+1)] + (1-beta2) * grads["dW" + str(l+1)]**2
s["db" + str(l+1)] = beta2 * s["db" + str(l+1)] + (1-beta2) * grads["db" + str(l+1)]**2
### END CODE HERE ### # Compute bias-corrected second raw moment estimate. Inputs: "s, beta2, t". Output: "s_corrected".
### START CODE HERE ### (approx. 2 lines)
s_corrected["dW" + str(l+1)] = s["dW" + str(l+1)]/(1-beta2**t)
s_corrected["db" + str(l+1)] = s["db" + str(l+1)]/(1-beta2**t)
### END CODE HERE ### # Update parameters. Inputs: "parameters, learning_rate, v_corrected, s_corrected, epsilon". Output: "parameters".
### START CODE HERE ### (approx. 2 lines)
parameters["W" + str(l+1)] = parameters["W" + str(l+1)] - learning_rate * v_corrected["dW" + str(l+1)]/(s_corrected["dW" + str(l+1)]+epsilon)**0.5
parameters["b" + str(l+1)] = parameters["b" + str(l+1)] - learning_rate * v_corrected["db" + str(l+1)]/(s_corrected["db" + str(l+1)]+epsilon)**0.5
### END CODE HERE ### return parameters, v, s
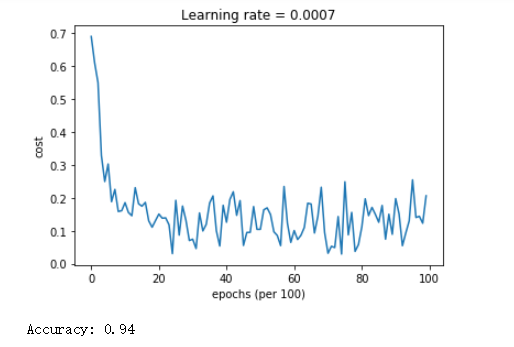
1)mini-batch gradient descent

可见其代价函数抖动得比较厉害,可能这是“mini-batch”这种选取部分数据的方式所无法避免的吧。而且准确率也不高。
2)momentum

momentum居然跟mini-batch gradient descent 的效果无异,在进行理论解释时明明是那么的美好,为什么会这样?

3)Adam
Adam不仅收敛速度快,而且震荡也较之不明显,更重要的是准确率高,性能明显优于mini-batch gradient descent 、 momentum。由此可见,在梯度下降的优化算法方面,Adam做得十分出色!
七.学习率衰减
1.在使用min-batch gradient descent的时候,由于没有使用到全部数据(或者说batch里面存在噪声),梯度下降时方向很可能不是指向局部最优点,而是有些偏差,就像一个醉汉一样颠颠簸簸地往前走,如下图:
2.在靠近局部走优点的过程中,应该逐渐降低学习率,即以更细的步伐行走,才能更加精确地靠近局部最优点。其过程如下图的绿色曲线:

吴恩达深度学习笔记(五) —— 优化算法:Mini-Batch GD、Momentum、RMSprop、Adam、学习率衰减的更多相关文章
- 吴恩达深度学习笔记(十二)—— Batch Normalization
主要内容: 一.Normalizing activations in a network 二.Fitting Batch Norm in a neural network 三.Why does ...
- 【Deeplearning.ai 】吴恩达深度学习笔记及课后作业目录
吴恩达深度学习课程的课堂笔记以及课后作业 代码下载:https://github.com/douzujun/Deep-Learning-Coursera 吴恩达推荐笔记:https://mp.weix ...
- 吴恩达深度学习笔记(八) —— ResNets残差网络
(很好的博客:残差网络ResNet笔记) 主要内容: 一.深层神经网络的优点和缺陷 二.残差网络的引入 三.残差网络的可行性 四.identity block 和 convolutional bloc ...
- 吴恩达深度学习笔记(deeplearning.ai)之卷积神经网络(二)
经典网络 LeNet-5 AlexNet VGG Ng介绍了上述三个在计算机视觉中的经典网络.网络深度逐渐增加,训练的参数数量也骤增.AlexNet大约6000万参数,VGG大约上亿参数. 从中我们可 ...
- 吴恩达深度学习笔记(deeplearning.ai)之卷积神经网络(CNN)(上)
作者:szx_spark 1. Padding 在卷积操作中,过滤器(又称核)的大小通常为奇数,如3x3,5x5.这样的好处有两点: 在特征图(二维卷积)中就会存在一个中心像素点.有一个中心像素点会十 ...
- 吴恩达深度学习笔记(deeplearning.ai)之循环神经网络(RNN)(三)
1. 导读 本节内容介绍普通RNN的弊端,从而引入各种变体RNN,主要讲述GRU与LSTM的工作原理. 事先声明,本人采用ng在课堂上所使用的符号系统,与某些学术文献上的命名有所不同,不过核心思想都是 ...
- 吴恩达深度学习笔记(deeplearning.ai)之卷积神经网络(一)
Padding 在卷积操作中,过滤器(又称核)的大小通常为奇数,如3x3,5x5.这样的好处有两点: 在特征图(二维卷积)中就会存在一个中心像素点.有一个中心像素点会十分方便,便于指出过滤器的位置. ...
- 吴恩达深度学习笔记(九) —— FaceNet
主要内容: 一.FaceNet人脸识别简介 二.使用神经网络对人脸进行编码 三.代价函数triple loss 四.人脸库 五.人脸认证与人脸识别 一.FaceNet简介 1.FaceNet是一个深层 ...
- 吴恩达深度学习笔记(七) —— Batch Normalization
主要内容: 一.Batch Norm简介 二.归一化网络的激活函数 三.Batch Norm拟合进神经网络 四.测试时的Batch Norm 一.Batch Norm简介 1.在机器学习中,我们一般会 ...
随机推荐
- WordPress常用标签和调用总结
调用头部模板<?php get_header();?> 调用尾部模板<?php get_footer();?> 调用侧边栏<?php get_sidebar();?> ...
- 【BZOJ4199】[Noi2015]品酒大会 后缀数组+并查集
[BZOJ4199][Noi2015]品酒大会 题面:http://www.lydsy.com/JudgeOnline/wttl/thread.php?tid=2144 题解:听说能用SAM?SA默默 ...
- mongodb基础操作
查询选择器>db.customers.find({age:{$lt:102}})查询age小于102的数据$lte表示小于或等于$gt表示大于$gte表示大于或等于>db.customer ...
- JavaScript数据结构与算法-链表练习
链表的实现 一. 单向链表 // Node类 function Node (element) { this.element = element; this.next = null; } // Link ...
- Json模块的详细介绍(序列化)
什么叫序列化——将原本的字典.列表等内容转换成一个字符串的过程就叫做序列化. 比如,我们在python代码中计算的一个数据需要给另外一段程序使用,那我们怎么给? 现在我们能想到的方法就是存在文件里,然 ...
- jQuery 属性操作
1 css操作 2 文本操作 3 属性操作 4 位置 5 尺寸 1.css操作 addClass();// 添加指定的CSS类名. removeClass();// 移除指定的CSS类名. hasCl ...
- Springboot 错误信息:Required String parameter 'loginname' is not present 引发的研究
@PostMapping("/reg/change")public CommonSdo change( @RequestParam(value = "oldPasswor ...
- C# emoji 表情如何插入mssql
如何将emoji表情存入mssql 呢? 在Windows显示emoji(win7需要安装补丁) 在MAC完美支持 步骤就是将显示不出来的emoji UrlEncode=>进入MSsql 然后拿 ...
- (扫盲)WebSocket 教程
原文地址:http://www.ruanyifeng.com/blog/2017/05/websocket.html WebSocket 是一种网络通信协议,很多高级功能都需要它. 本文介绍 WebS ...
- GPS坐标(WGS84)转换百度坐标(BD09) python测试
基础知识坐标系说明: WGS84:为一种大地坐标系,也是目前广泛使用的GPS全球卫星定位系统使用的坐标系. GCJ02:是由中国国家测绘局制订的地理信息系统的坐标系统.由WGS84坐标系经加密后的坐标 ...