PID程序实现
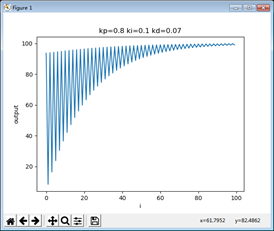
传统PID(位置式PID控制)调节:
这种算法的缺点是,由于全量输出,每次输出均与过去的状态有关,计算时要对
e(k) 进行累加,计算机运算工作量大。而且,因为计算机输出的 u(k) 对应的是执行机构的实际位置,如计算机出现故障, u(k) 的大幅度变化,会引起执行机构位置的大幅度变化,这种情况往往是生产实践中不允许的,在某些场合,还可能造成重大的生产事故,因而产生了增量式
PID 控制算法。
代码如下:
import matplotlib.pyplot as plt
class Pid:
def __init__(self,set_value = 100,now_value = 0,error_sum = 0,error_value = 0,error_last = 0,kp = 0,ki = 0,kd = 0):
self.set_value = set_value
self.now_value = now_value
self.error_sum = error_sum
self.error_value = error_value
self.error_last = error_last
self.kp = kp
self.ki = ki
self.kd = kd
pid = Pid(100,100,0,0,0,0.7,0.1,0.1)
data = []
i = 100
while i:
pid.error_value = pid.set_value - pid.now_value
pid.error_sum += pid.error_value
pid.now_value = pid.kp * (pid.error_value + pid.ki * pid.error_sum + pid.kd * (pid.error_value - pid.error_last))
print(pid.now_value)
data.append(pid.now_value)
pid.error_last = pid.error_value
i = i - 1
#打印输出图表的部分
plt.plot(data)
plt.title("kp=" + (str)(pid.kp) + " ki=" + (str)(pid.ki) + " kd=" + (str)(pid.kd))
plt.ylabel('output')
plt.xlabel('i')
plt.show()
波形如下(kp,ki,kd的参数需自行调节):
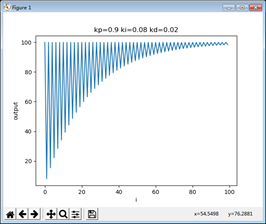
增量式PID控制调节:
代码如下:
import matplotlib.pyplot as plt
class Pid:
def __init__(self,set_value = 100,now_value = 0,add_value = 0,last_value = 0,error_value = 0,error_last = 0,error_last_last = 0,kp = 0,ki = 0,kd = 0):
self.set_value = set_value
self.now_value = now_value
self.add_value = add_value
self.last_value = last_value
self.error_value = error_value
self.error_last = error_last
self.error_last_last = error_last_last
self.kp = kp
self.ki = ki
self.kd = kd
pid = Pid(100,100,0,0,0,0,0,0.9,0.07,0.02)
data = []
i = 100
while i:
pid.error_value = pid.set_value - pid.now_value
pid.add_value = pid.kp * (pid.error_value - pid.error_last) + pid.ki * pid.error_value + pid.kd * (pid.error_value - 2 * pid.error_last + pid.error_last_last)
pid.now_value += pid.add_value
print(pid.now_value)
data.append(pid.now_value)
pid.error_last = pid.error_value
pid.error_last_last = pid.error_last
i = i - 1 plt.plot(data)
plt.title("kp=" + (str)(pid.kp) + " ki=" + (str)(pid.ki) + " kd=" + (str)(pid.kd))
plt.ylabel('output')
plt.xlabel('i')
plt.show()
波形如下((kp,ki,kd的参数需自行调节)):
PID程序实现的更多相关文章
- 增量式PID计算公式4个疑问与理解
一开始见到PID计算公式时总是疑问为什么是那样子?为了理解那几道公式,当时将其未简化前的公式“活生生”地算了一遍,现在想来,这样的演算过程固然有助于理解,但假如一开始就带着对疑问的答案已有一定看法后再 ...
- PID控制器的数字实现及C语法讲解
PID控制器的数字实现及C语法讲解 概述 为方便学习与交流,根据自己的理解与经验写了这份教程,有错误之处请各位读者予以指出,具体包含以下三部分内容: (1) PID数字化的推导过程(实质:微积分的近 ...
- android 卸载程序、清除数据、停止服务用法
要实现卸载程序.清除数据.停止正在执行的服务这几大模块,如今将代码粗略总结例如以下: 主要运用到的类有 PackageManager ActivityManager ApplicationInfo R ...
- Android学习-应用程序管理
在前段时间,公司要求做一个Android系统的应用程序管理,要实现卸载程序.清除数据.停止正在运行的服务这几大模块,现在将代码粗略总结如下: 主要运用到的类有 PackageManager Activ ...
- linux 之程序管理
一个程序的父进程可以用PPID来判断 命令ps -l 可以用来观察程序相关的输出信息 被关闭的程序又产生:crontab或者父进程产生的 我们将常驻在系统中的程序称为:服务(daemon) ...
- Python编写守护进程程序
Python编写守护进程程序思路 1. fork子进程,父进程退出通常,我们执行服务端程序的时候都会通过终端连接到服务器,成功连接后会加载shell环境,终端和shell都是进程,shell进程是终端 ...
- perf + Flame Graph火焰图分析程序性能
1.perf命令简要介绍 性能调优时,我们通常需要分析查找到程序百分比高的热点代码片段,这便需要使用 perf record 记录单个函数级别的统计信息,并使用 perf report 来显示统计结果 ...
- [转]perf + 火焰图分析程序性能
1.perf命令简要介绍 性能调优时,我们通常需要分析查找到程序百分比高的热点代码片段,这便需要使用 perf record 记录单个函数级别的统计信息,并使用 perf report 来显示统计结果 ...
- SIMATIC PID温度控制
SIMATIC PID温度控制 // VAR_INPUT ------------------------------------------------------------------- #if ...
随机推荐
- hive安装常见错误
hive编译出错 mvn clean package -DskipTests -Phadoop-2 -Pdist 失败日志1 Failed to execute goal on project hiv ...
- 自制操作系统-使用16进制文件显示 hello world
1.下载qemu: https://www.cnblogs.com/sea-stream/p/10849382.html 2.制作软盘镜像 使用010editor,新建文件 图2 另保存为cherry ...
- springboot 出现 org.hibernate.LazyInitializationException: could not initialize proxy
org.hibernate.LazyInitializationException: could not initialize proxy [com.example.shop.dataobject.U ...
- CF1208C
CF1208C 这场杜老师大战tourist的比赛怎么这么多人类智慧题... 题意: 构造一个 $ n \times n $ 的矩阵,使得该矩阵每一行与每一列的元素的异或和全部相等. 解法: 异或的神 ...
- servlet容器:jetty,Tomcat,JBoss
一.几款servlet容器对比:jetty,Tomcat,JBoss 二.JBOSS相关问题解决 1.JBOSS下载安装 2.处理jboss-as-7.1.1.Final与jdk1.8及1.8以上版本 ...
- js面向对象入门
通常我们写js以及调用: function init(){ console.log("init") } function load(){ console.log("loa ...
- Airbnb架构要点分享——阅读心得
目前,Airbnb已经使用了大约5000个AWS EC2实例,其中大约1500个实例用于部署其应用程序中面向Web的部分,其余的3500个实例用于各种分析和机器学习算法.而且,随着Airbnb的发展, ...
- WIN7+QT5.2.0 连接oracle11g问题及解决方法
用下面的代码建立连接之后,出现了几个问题 //连接数据库 QSqlDatabase db = QSqlDatabase::addDatabase("QOCI"); /**连接Ora ...
- Swift 条件语句
条件语句通过设定的一个或多个条件来执行程序,在条件为真时执行指定的语句,在条件为 false 时执行另外指定的语句. 可以通过下图来简单了解条件语句的执行过程: Swift 提供了以下几种类型的条件语 ...
- 007-log-log4j2、slf4j+log4j2
一.概述 而log4j2的性能无论在同步日志模式还是异步日志模式下都是最佳的. 根本原因在于log4j2使用了LMAX, 一个无锁的线程间通信库代替了, logback和log4j之前的队列. 并发性 ...