RVIZ实现模拟控制小车
RVIZ是一个强大的可视化工具,可以看到机器人的传感器和内部状态。
1.安装rbx1功能包
Rbx1是国外一本关于ros的书中的配套源码,包含了机器人的基本仿真、导航、路径规划、图像处理、语音识别等等。
获得资源:google再svn上发布的源码,无奈墙太高,梯子太矮。好在github上也有相关资源。
cd ~/catkin_ws/src
git clone https://github.com/pirobot/rbx1.git
编译过程参见:创建、编译、运行rospackage
rospack profile //加入ROS package路径
2.安装arbotix simulator
下载源码:
git clone https://github.com/vanadiumlabs/arbotix_ros.git
编译并且添加至ros环境。
3.启动roscore
4.启动模拟小车
roslaunch rbx1_bringup fake_pi_robot.launch
启动失败的话,在该terminal下重新catkin_make, 然后source devel/setup.sh
Tips:rosrun是运行一个单独节点的命令,如果要运行多个节点,则需要使用多次rosrun命令。而roslaunch采用XML的格式对需要运行的节点进行描述,可以同时运行多个节点。例如:
<launch>
<node name="listener" pkg="rospy_tutorials" type="listener.py" output="screen"/>
<node name="publish_on_shutdown" pkg="rospy_tutorials" type="publish_on_shutdown.py" output="screen"/>
</launch>
5.启动可视化
rosrun rviz rviz -d `rospack find rbx1_nav`/sim.rviz
启动失败的话,在该terminal下重新catkin_make, 然后source devel/setup.sh
避免每次都source 可以修改~/.bashrc文件,在文件末尾添加 source ~/catkin_ws/devel/setup.sh
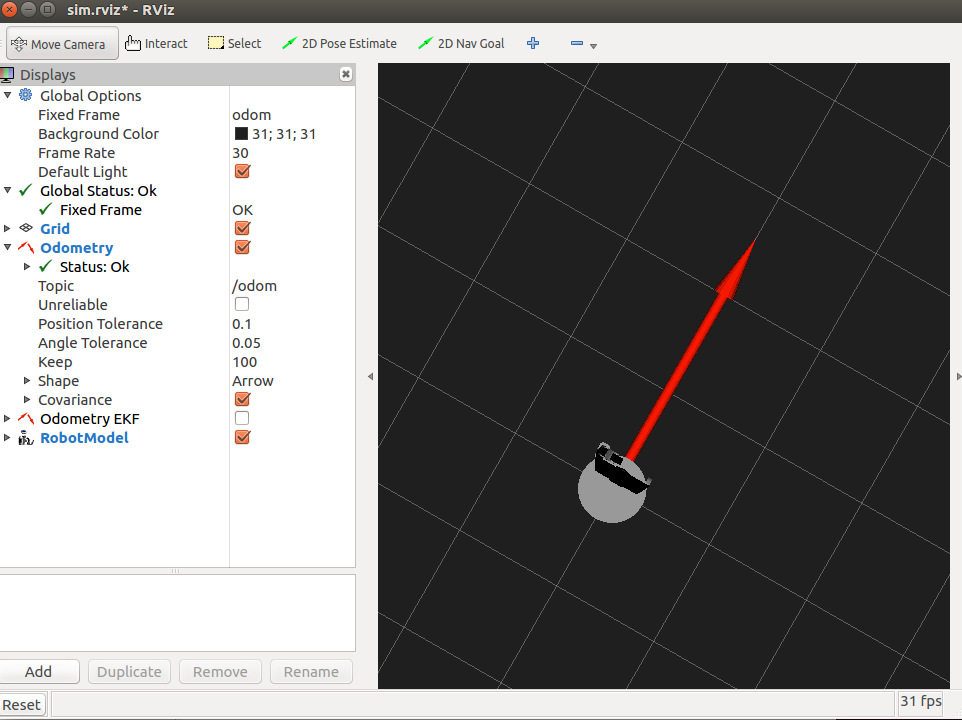
启动小车:rostopic pub -r 10 /cmd_vel geometry_msgs/Twist '[1,0,0]' '[0,0,1]'
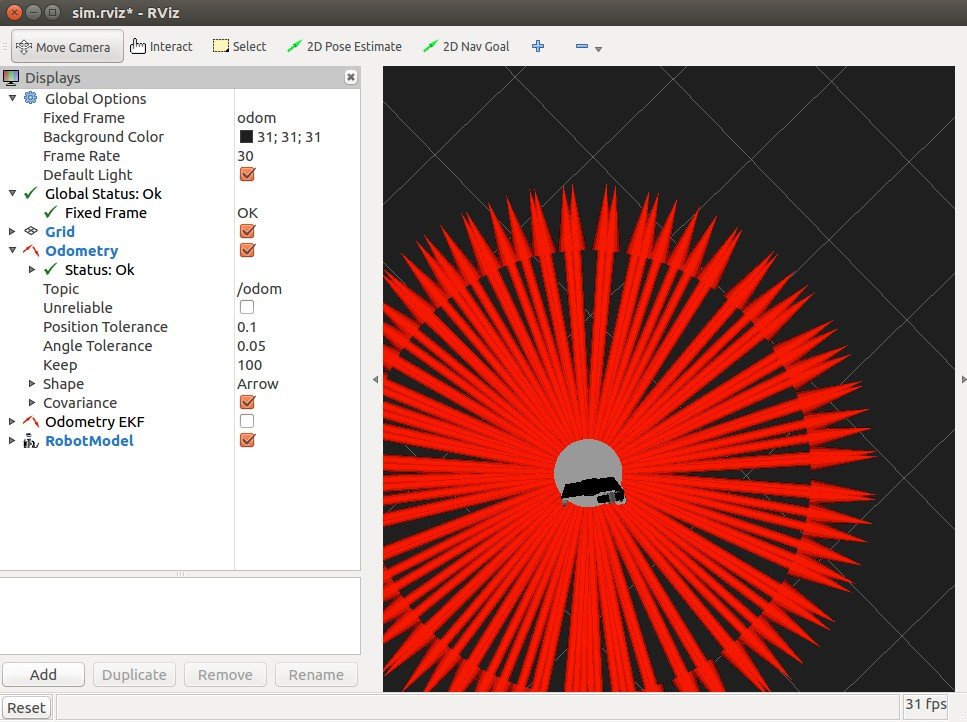
停止小车:
Ctrl+c

RVIZ实现模拟控制小车的更多相关文章
- Linux模拟控制网络时延
之前以为可以使用Linux自带的工具模拟控制网络时延,所以上网找了一些资料.后来发现,找到的资料目前只支持在一个网卡上模拟发送报文的时延,而不能设置有差别的网络时延,或者说当要模拟的向A发送的时延与要 ...
- Qt on android 蓝牙开发(控制小车)
因为要做一个用蓝牙控制小车的app,就用着QT搞了下,网上关于QT蓝牙开发的资料比较少,我在这里记录下过程希望对看到了人有所帮助 首先在项目文件里添加 QT += bluetooth 这样就可以用QT ...
- Arduino开发版学习计划--蓝牙控制小车行走
蓝牙模块一共6个引脚,我们一般只需要接4个线就可以了,分别是VCC.GND.TXD.RXD这四个引脚,我们分别接到arduino板子上,VCC接3.3V,GND接板子的GND,蓝牙TXD接板子的RXD ...
- 制作Kinect体感控制小车教程 <一>
转载请注明出处:http://blog.csdn.net/lxk7280 Kinect体感控制小车 Kine ...
- [转]基于ROS平台的移动机器人-4-通过ROS利用键盘控制小车移动
原文出处: https://blog.csdn.net/Forrest_Z/article/details/55002484 准备工作 1.下载串口通信的ROS包 (1)cd ~/catkin_ws/ ...
- 树莓派小车(三)Python控制小车
正文之前 由于最近忙于复习赶考,所以暂时没有拿起树莓派小车,直到昨天,终于空出时间来把代码整理一下来和大家分享. 正文 在树莓派小车系列之二中,讲到了树莓派的引脚定义方式有两种: PHYSICAL N ...
- 利用DoHome APP和音箱控制小车的实验参考步骤
准备材料: Arduino Uno 一块 Arduino 扩展板 购买链接 DT-06模块一个 购买链接 安卓手机一个 小度音箱一个 小车一个 杜邦线若干 1.DT-06固件 ...
- python-web-selenium模拟控制浏览器
用 selenium 模块控制浏览器 启动 selenium 控制的浏览器 from selenium import webdriver brower = webdriver.Firefox() br ...
- Unity2D模拟控制位移
using UnityEngine; using System.Collections; public class PlayerController : MonoBehaviour { public ...
随机推荐
- asp.net mvc 根据浏览器判断,如果是微信浏览器则进行网页授权,否则直接访问
遇到这个需求,想到的第一点就是,这个肯定是需要写在一个通用的地方.方便调用.一般可以定义个 父类控制器在OnActionExcuting方法执行前写逻辑,先上代码,一边写代码一边讲解: /// < ...
- svn安装教程
svn服务器端下载(VisualSVN) 安装包,选择windows版的VisualSVN-Server https://www.visualsvn.com/downloads/ svn客户端下载(T ...
- C++ 函数模板的返回类型如何确定?
函数模板 #include <iostream> // 多个参数的函数木板 template<typename T1, typename T2> T2 max(T1 a, T2 ...
- 【转】Cowboy 开源 WebSocket 网络库
原文链接: http://www.cnblogs.com/gaochundong/p/cowboy_websockets.html
- linux下好玩或者好用的小工具
本篇文章用于记录自己认为很好玩的linux下的小工具,不断添加中..大家如果有什么好玩的小工具的话,欢迎留言告诉我. 1. cmatrix工具 功能介绍: 可以产生黑客帝国中字符满屏幕飞的效果,当你离 ...
- 让windows 2003启动后直接进入桌面
windows 2003启动后进入桌面需要解决的几个问题 1.如何去除掉 ctrl+alt+del的提示界面 2.如何设置自动登录的用户名密码 3.在异常启动时会出现关闭事件跟踪程序 也会导致不能直接 ...
- SpringMVC+ Mybatis 配置多数据源 + 自动数据源切换 + 实现数据库读写分离
现在大型的电子商务系统,在数据库层面大都采用读写分离技术,就是一个Master数据库,多个Slave数据库.Master库负责数据更新和实时数据查询,Slave库当然负责非实时数据查询.因为在实际的应 ...
- error connecting: Timeout expired 超时时间已到. 达到了最大池大小 错误及Max Pool Size设置
[参考]Timeout expired 超时时间已到. 达到了最大池大小 错误及Max Pool Size设置 [参考][数据库-MySql] MySqlConnection error connec ...
- Oracle 11G 安装文档
一. 将文件win32_11gR2_database_1of2.zip和win32_11gR2_database_2of2.zip解压. 注意:这两个文件解压到同一个目录下,即:将Components ...
- 10.Oracle Golden Date(ogg)的搭建和管理
一. GoldenGate 概述 GoldenGate现在是业内成熟的数据容灾与复制产品:GoldenGate是一种基于日志的结构化数据复制方式,它通过解析源数据库在线日志或归档日志获得数据的增删改变 ...