创建一个ROS工作空间(ROS Workspace)
详细参照 http://wiki.ros.org/ROS/Tutorials/InstallingandConfiguringROSEnvironment
1.
mkdir -p ~/catkin_ws/src
解析:
在 /home/你的用户名目录/ 下创建一个ROS工作空间,即文件夹catkin_ws,
然后在工作空间 catkin_ws 下创建一个文件夹 src
你也可以将工作空间 catkin_ws 起成其他名字,例如:mkdir -p ~/tutorial/src ,那么下面的所有命令中的catkin_ws都要对应换成 tutorial(命令 ls 的功能即查看当前所在目录里有哪些文件)
2.
cd ~/catkin_ws/src
解析:
打开工作空间catkin_ws下的文件夹src(命令 pwd 的功能即查看当前所在目录)
3.
catkin_init_workspace
解析:
执行完该命令后,src目录下会多出一个 CMakeLists.txt 文件。

4.
cd ~/catkin_ws/
解析:
返回到上层目录
5.
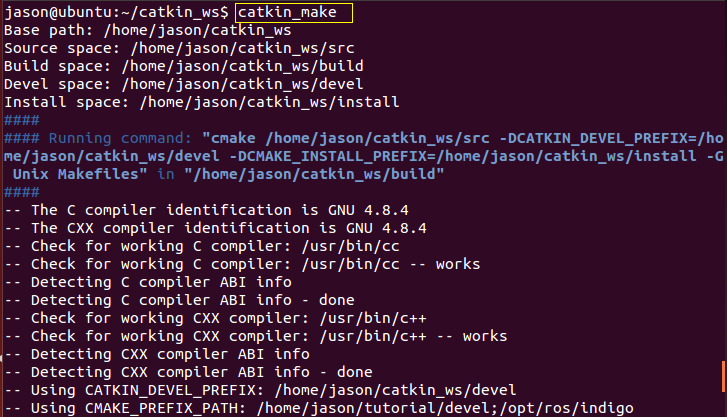
catkin_make
解析:
执行完该命令后,发现工作空间catkin_ws中有三个目录: build devel src
其中,src是我们创建工作空间时创建的目录,另外两个是执行完 catkin_make 后生成的。


6.
source devel/setup.bash
解析:
将对应的工作空间的路径加入环境变量ROS_PACKAGE_PATH中。
如果新开了一个终端命令行,在使用该工作空间前,必须先将该工作空间的路径加入环境变量ROS_PACKAGE_PATH中。
7.
echo $ROS_PACKAGE_PATH
解析:
查看当前环境变量如果打印出以下信息,说明你的工作环境设置好了:
/home/你的用户名/你的工作空间名/src:/opt/ros/indigo/share:/opt/ros/indigo/stacks
创建一个ROS Workspace 的方法总结:
mkdir -p ~/catkin_ws/src cd ~/catkin_ws/src catkin_init_workspace cd ~/catkin_ws/ catkin_make
source devel/setup.bash
创建一个ROS工作空间(ROS Workspace)的更多相关文章
- 创建一个catkin工作空间
先确定自己的环境变量是否设置正确 export | grep ROS 若出现如下的,说明是正确的 declare -x ROSLISP_PACKAGE_DIRECTORIES="" ...
- ROS工作空间和程序包创建
预备工作后面操作中我们将会用到ros-tutorials程序包,请先安装: $ sudo apt-get install ros-<distro>-ros-tutorials 将 < ...
- ROS的初步学习--创建一个工作空间和一个程序包
快速开始 创建工作区(workspace) 工作区可以作为一个独立的项目进行编译,存放ROS程序的源文件.编译文件和执行文件.建立工作区的方法如下: mkdir -p ~/catkin_ws/src ...
- 创建一个ROS包
先前笔者不知道catkin到底是个什么东东,后来终于在官方网站上找到了答案,原来catkin是ROS的一个官方的编译构建系统,是原本的ROS的编译构建系统rosbuild的后继者.catkin的来源有 ...
- (二)创建ROS工作空间
ROS 教程中涉及的和编写的所有 ROS 代码需要有一个地方存放它,这个地方叫做工作空间.可以说,这个工作空间应该是一个大的集合.当我们要编译程序的时候,我们是对整个工作空间进行编译的. 这个工作空 ...
- ROS Learning-003 beginner_Tutorials 创建ROS工作空间
ROS Indigo beginner_Tutorials-02 创建ROS工作空间 我使用的虚拟机软件:VMware Workstation 11 使用的Ubuntu系统:Ubuntu 14.04. ...
- ROS笔记1 安装及创建一个ROS Package
安装 跟着官方的安装指引来就行了.安装前要先确定自己的ros版本和ubuntu版本.这二者是一一对应的. http://wiki.ros.org/ROS/Installation 主要是package ...
- Ros使用Arduino 3用rosserial创建一个subscriber
在前面的一节中,我们已经使用arduino创建了一个publisher节点,接下来将会用arduino来创建一个subscriber,接收电脑传去的信息并做出相应的反应. 1启动Arduino 将ar ...
- Ros使用Arduino 2 使用rosserial创建一个publisher
1 启动arduino 将arduino开发板连接到电脑的usb口,在arduino IDE中进行设置. 选择Tools->Board,选择你所使用的arduino开发板的类型,所使用的ardu ...
随机推荐
- 201521123018 《Java程序设计》第6周学习总结
1. 本章学习总结 2. 书面作业 一.clone方法 1.1 Object对象中的clone方法是被protected修饰,在自定义的类中覆盖clone方法时需要注意什么? 用protected修饰 ...
- 201521123101 《Java程序设计》第4周学习总结
1. 本周学习总结 1.1 尝试使用思维导图总结有关继承的知识点. 1.2 使用常规方法总结其他上课内容. 理解类的继承的概念,明白父与子之间关系的 2. 书面作业 1.注释的应用,使用类的注释与方法 ...
- 201621123067《JAVA程序设计》第一周学习总结
第一周-JAVA基本概念 1.本周学习总结 本周初次接触Java这一工程语言,我也首次接触了类名和面向对象这两个关键术语,虽然有C的基础但还是觉得有点不同.同时也学习到了Java的安装,eclipse ...
- Java+大数据开发——HDFS详解
1. HDFS 介绍 • 什么是HDFS 首先,它是一个文件系统,用于存储文件,通过统一的命名空间--目录树来定位文件. 其次,它是分布式的,由很多服务器联合起来实现其功能,集群中的服务器有各自的角 ...
- 运用GRASP原则来做uml交互类图-------pos机实例
重要的几个GRASP原则:1.控制器模式 2.创建者模式 (原则)3.信息专家模式(原则) 4. 高内聚 低耦合 这里所说的模式并不是java中针对具体的事件的设计模式 主成功场景的几个操作: ...
- MyBatis框架(二)
导包, 配置mybatis的总配置文件: mybatis-config.xml, <?xml version="1.0" encoding="UTF-8" ...
- 网站如何集成百度UEditor编辑器
在平时的网站维护使用过程中,富文本编辑器是网站必不可少的元素之一.现在市面上各种编辑器功能设计参差不齐,自己做了几个网站都是用蝉知建站系统做的,而蝉知默认内置的编辑器是KindEditor,功能简单, ...
- Spring-boot:5分钟整合Dubbo构建分布式服务
概述: Dubbo是Alibaba开源的分布式服务框架,它最大的特点是按照分层的方式来架构,使用这种方式可以使各个层之间解耦合(或者最大限度地松耦合).从服务模型的角度来看,Dubbo采用的是一种非常 ...
- AES加密解密——AES在JavaWeb项目中前台JS加密,后台Java解密的使用
一:前言 在软件开发中,经常要对数据进行传输,数据在传输的过程中可能被拦截,被监听,所以在传输数据的时候使用数据的原始内容进行传输的话,安全隐患是非常大的.因此就要对需要传输的数据进行在客户端进行加密 ...
- Spark sql ---JSON
介绍Spark SQL的JSON支持,这是我们在Databricks中开发的一个功能,可以在Spark中更容易查询和创建JSON数据.随着网络和移动应用程序的普及,JSON已经成为Web服务API以及 ...