Ros使用Arduino 3用rosserial创建一个subscriber
在前面的一节中,我们已经使用arduino创建了一个publisher节点,接下来将会用arduino来创建一个subscriber,接收电脑传去的信息并做出相应的反应。
1启动Arduino
将arduino开发板连接到电脑的usb口,在arduino IDE中进行设置。
选择Tools->Board,选择你所使用的arduino开发板的类型,所使用的arduino开发板是arduino pro min。
设置好开发板之后,继续选择Tools->Serial Port->/dev/ttyUSB0。
2编译程序
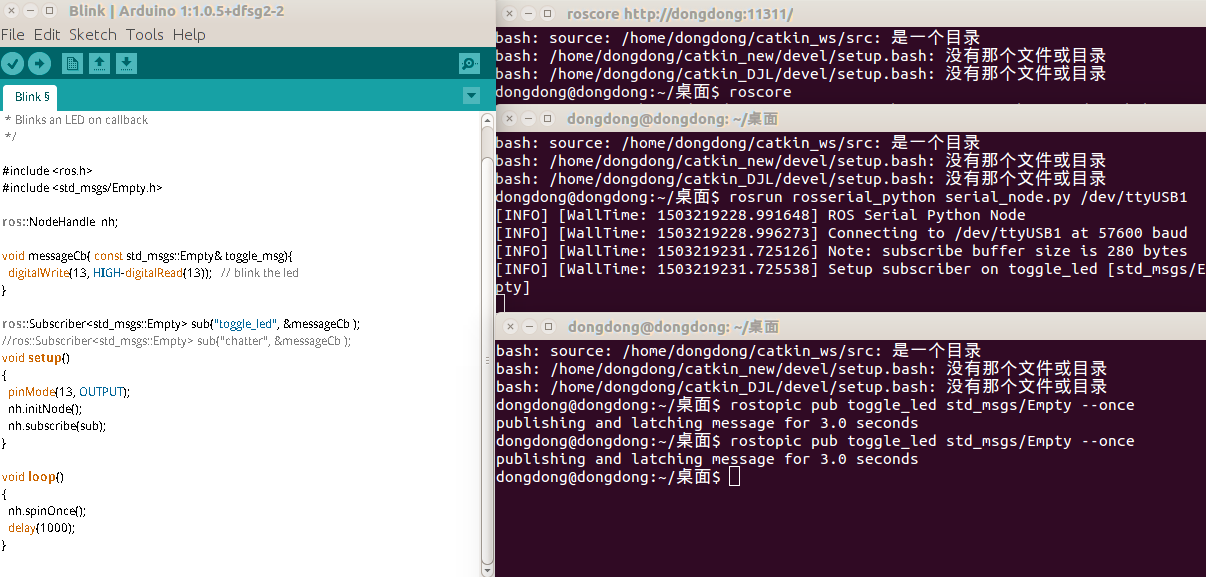
选择File->Examples->ros_lib->Blink,就可以打开一个示例程序,代码如下:
/*
* rosserial Subscriber Example
* Blinks an LED on callback
*/ #include <ros.h>
#include <std_msgs/Empty.h>
//创建了一个节点句柄,这允许我们的程序能够创建发布者和订阅者,节点句柄同样和串口通信有关系。
ros::NodeHandle nh;
// 创建回调函数,必须使用一个消息的常引用作为一个参数。
// 消息类型是 std_msgs::Empty 消息的名字是toggle_msg
// 回调函数中,我们可以引用 toggle_msg,因为他是空的,所以就没必要了。接受到一次,让LED闪烁一次。
void messageCb( const std_msgs::Empty& toggle_msg){
digitalWrite(13, HIGH-digitalRead(13)); // blink the led
}
//创建一个订阅者subscriber , 订阅消息 toggle_led,消息类型是 std_msgs::Empty,回调函数是messageCb()
ros::Subscriber<std_msgs::Empty> sub("toggle_led", &messageCb );
//初始化ros的节点句柄,告知所有将要订阅的话题,订阅你想收听的任何话题。
void setup()
{
pinMode(13, OUTPUT);
nh.initNode();
nh.subscribe(sub);
}
//调用了ros::spinOnce(),在这个函数中,所有ROS通信的回调函数都被处理。
//在loop函数中,我们不需要去做任何其它的处理。因为这个函数ros::spinOnce()将会传递消息给subscriber的回调函数。
void loop()
{
nh.spinOnce();
delay(1);
}
烧录程序
在arduino IDE中点击upload按钮,运行程序。
运行ROS
新建窗口
roscore
接着运行rosserial客户端应用,它把你的arduino消息转发到ROS系统的其它部分:
rosrun rosserial_python serial_node.py /dev/ttyUSB0
最后你可以输入一下命令来查看你的arduino板子上的LED灯的变化情况:
rostopic pub toggle_led std_msgs/Empty --once
上述命令运行一次后LED灯亮了,再运行一下次又灭了,如此反复的运行,会发生相应的变化。
Ros使用Arduino 3用rosserial创建一个subscriber的更多相关文章
- Ros使用Arduino 2 使用rosserial创建一个publisher
1 启动arduino 将arduino开发板连接到电脑的usb口,在arduino IDE中进行设置. 选择Tools->Board,选择你所使用的arduino开发板的类型,所使用的ardu ...
- ROS学习记录(三)————创建一个简单的发布节点和订阅节点
暑假在家有些懈怠,不,非常懈怠- -||!良心已经发痛了,想快些补回原来的进度,但忽然发现,中断了一段时间再重新去学习,有的地方连最基本的符号都忘记了 ,这次特意弄个最最基础的,恢复一下,以前的进度. ...
- 创建一个ROS包
先前笔者不知道catkin到底是个什么东东,后来终于在官方网站上找到了答案,原来catkin是ROS的一个官方的编译构建系统,是原本的ROS的编译构建系统rosbuild的后继者.catkin的来源有 ...
- 创建一个ROS工作空间(ROS Workspace)
详细参照 http://wiki.ros.org/ROS/Tutorials/InstallingandConfiguringROSEnvironment1.mkdir -p ~/catkin_ws/ ...
- ROS笔记1 安装及创建一个ROS Package
安装 跟着官方的安装指引来就行了.安装前要先确定自己的ros版本和ubuntu版本.这二者是一一对应的. http://wiki.ros.org/ROS/Installation 主要是package ...
- ROS的初步学习--创建一个工作空间和一个程序包
快速开始 创建工作区(workspace) 工作区可以作为一个独立的项目进行编译,存放ROS程序的源文件.编译文件和执行文件.建立工作区的方法如下: mkdir -p ~/catkin_ws/src ...
- Ros使用Arduino 1安装Arduino IDE
安装Arsuino IDE sudo apt-get install arduino 设置库文件路径 在使用ROS的库文件时,必须在代码的开头包括: #include <ros.h> 接下 ...
- ROS学习笔记(六)——创建、编译包
$ cd ~/catkin_ws #如果新开一个终端,就需要先吧ROS的工作空间配置好 $ source devel/setup.bash #工作空间的环境配置 #正式开始创建包 $ catkin_c ...
- ROS Learning-015 learning_tf(编程) 编写一个监听器程序 (Python版)
ROS Indigo learning_tf-02 编写一个 监听器 程序 (Python版) 我使用的虚拟机软件:VMware Workstation 11 使用的Ubuntu系统:Ubuntu 1 ...
随机推荐
- 启动设置mongodb
启动 ①:启动之前,我们要给mongodb指定一个文件夹,这里取名为”db",用来存放mongodb的数据. ②:微软徽标+R,输入cmd,首先找到“mongodb”的路径,然后运行mong ...
- 使用Nexus2.x为Maven3.x搭建私服构件仓库
前言 在笔者的前一篇博文<Use Maven3.x>中,笔者详细的讲解了如何通过使用Maven3.x来构建及管理你的项目.其中笔者提到过些关于私服的概念,但却没有明确的对私服做出详细的阐述 ...
- [PHP] 数据结构-循环链表的PHP实现
1.将单链表中终端结点的指针端由空指针改为指向头结点,单循环链表,循环链表和单链表的主要差异就在于循环的判断条件上原来是判断p->next是否为空,现在则是p->next不等于头结点,则循 ...
- docker构建自定义镜像
docker构建自定义镜像 要构建一个镜像,第一步准备所需要的文件,第二步编写Dockerfile文件,比如我现在构建一个java web镜像 第一步:准备java web工程的war包文件(这里假设 ...
- JVM内存:年轻代、老年代、永久代(推荐 转)
参考文章: 1.Java 新生代.老年代.持久代.元空间 2.Java内存与垃圾回收调优 3.方法区的Class信息,又称为永久代,是否属于Java堆? Java 中的堆是 JVM 所管理的最大的一块 ...
- csharp: using HtmlAgilityPack and ScrapySharp reading Url find text
https://github.com/exaphaser/ScrapySharp https://github.com/zzzprojects/html-agility-pack https://gi ...
- python之socketserver ftp功能简单讲解
TCP协议中的socket一次只能和一个客户端通信,然而socketserver可以实现和多个客户端通信. 它是在socket的基础上进行了一层封装,底层还是调用的socket # 服务端 impor ...
- Kotlin入门(10)七十二变的输入参数
上一篇文章介绍了Kotlin对函数的基本用法,包括函数的定义.输入参数的声明.输出参数的声明等等,这些足够对付简单的场合了.当然了,倘若一门新语言仅仅满足于这些雕虫小技,那也实在没什么前途.既然Kot ...
- JavaScript大杂烩8 - 理解文本解析的"黄金搭档"
文本解析"黄金搭档" - String与RegExp对象 文本解析是任何语言中最常用的功能,JavaScript中也是一样,而正则表达式作为最常用的方式,JavaScript也同样 ...
- Vue状态管理
1.导出Vuex import Vuex from 'vuex' 2.定义store /*状态管理*/ const store = new Vuex.Store({ state: { headerSh ...