3. Vector Spaces and Subspaces
3.1 Vector Spaces
The space \(R^n\) consists of all colunm vectors \(v\) with n components. We can add any vectors in \(R^n\) , and we can multiply any vector \(v\) by any scalar c , the result stays in the space \(R^n\).
examples:
columns between brackets : \(\left[ \begin{matrix} 4 \\ \pi \end{matrix} \right]\) is in \(R^2\)
commas and parentheses : (1,1,0,1,1) is in \(R^5\)
complex numbers spaces : \(\left[ \begin{matrix} 1 + i \\ 1-i \end{matrix} \right]\)
3.2 Subspaces
A subspace of a vector space is a set of vectors (including 0) that satisfies two requirements.
If \(v\) and \(w\) are vectors in the subspace and c is any scalar, then:
- rule 1 : \(v + w\) is in the subspace.
- rule 2 : \(cv\) is in the subspace.
- rule 1 + rule 2 : $cv + dw $ is in the subspace. (subspace is closed.)
Every subspace contains the zero vector.
Example: \(R^3\) subspaces
- The whole space \(R^3\) is a subspace (of itself)-- The largest one.
- Any lines through (0,0,0) -- L
- Any plane through (0,0,0) -- P
- The single vector (0,0,0) -- Z (zero vectors space--The littlest one)
3.3 Column Space
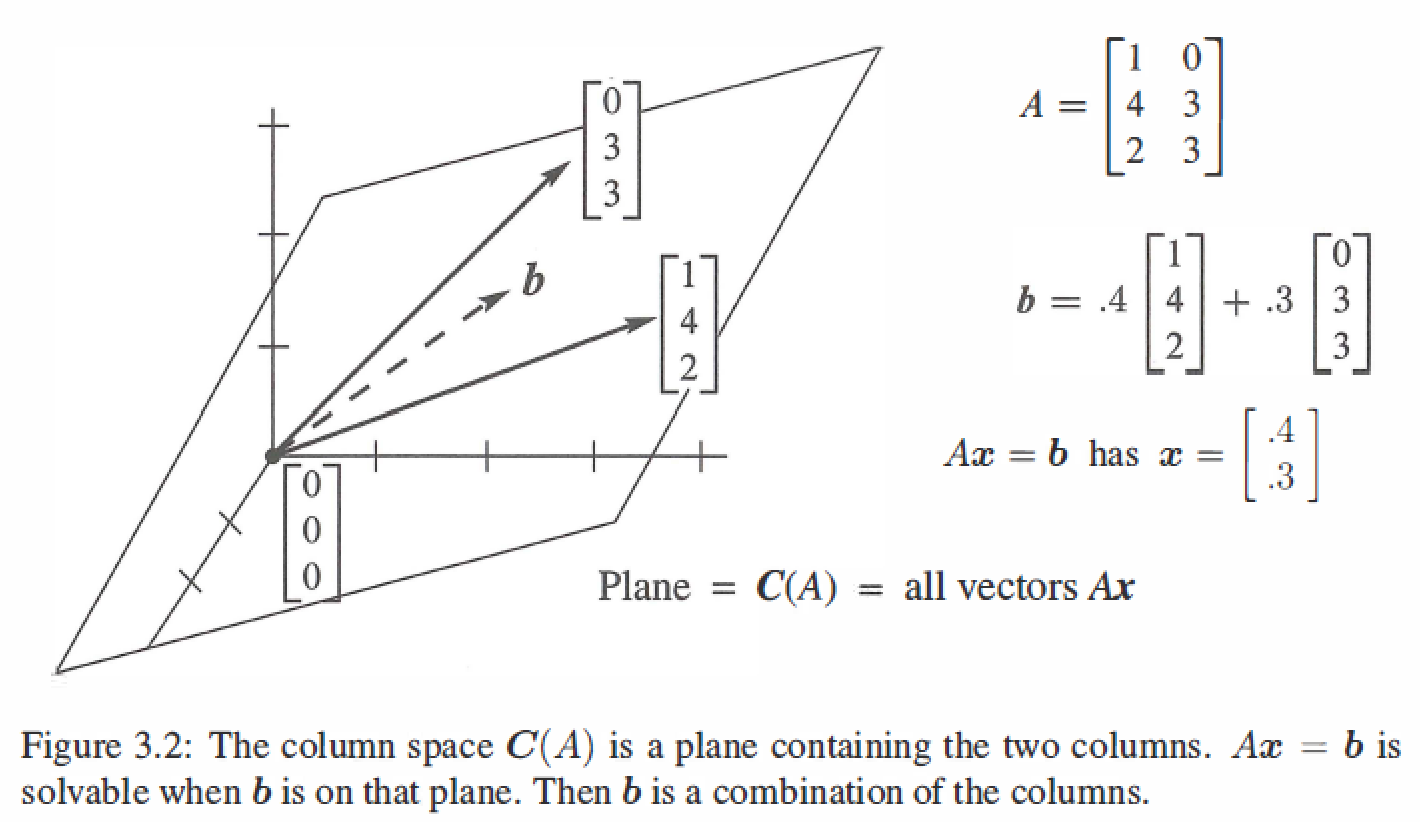
Ax =b , the column space of A is denoted by C(A) , C(A) contains not just the n columns of A, but all their combinations Ax,C(A) is a subspace of \(R^m\).
The system Ax=b is solvable if and only if b is in the column space of A.
\]
example:
\left[ \begin{matrix} x_1 \\ x_2 \end{matrix}\right] =
x_1\left[ \begin{matrix} 1 \\ 4 \\ 2 \end{matrix}\right] +
x_2\left[ \begin{matrix} 0 \\ 3 \\ 3 \end{matrix}\right]
\]
3.4 The Nullspace : Ax=0 or Rx=0
Key notes:
- The nullspace N(A) in \(R^n\) contains all solutions x to \(Ax=0\). This includes x=0.
- Elimination (from A to U to R) does not change the nullspace : N(A)=N(U)=N(R).
- The reduced row echelon form R=rref(A) has all pivots = 1, with zeros above and below.
- If column j of R is free (no pivot), there is "special solution" to Ax=0 with \(x_j=1\).
- Number of pivots = number of nonzero rows in R = rank r . There are n-r free columns(variables\dimensions).
- Every matrix with m<n has nonzero solutions to Ax=0 in its nullspace.
Solution steps:
- reducing A to its row echelon form R.
- finding the special solutions to Ax=0. ( Ux = 0 or Rx = 0)
- N(A) = N(U) = N(R) = all combinations of special solutions.
(3 \ \ pivot \ \ columns \ \ p ,2 \ \ free \ \ columns \ \ f) \\
step \ \ 1 \Downarrow \\
R = \left [ \begin{matrix} 1&0&a&0&c \\ 0&1&b&0&d \\ 0&0&0&1&e \\ 0&0&0&0&0 \end{matrix}\right] \\
(I \ \ in \ \ pivot \ \ columns ,F \ \ in \ \ free \ \ columns, 3 \ \ pivots: rank=3 ) \\
step \ \ 2 \Downarrow \\
s_1 =\left[ \begin{matrix} -a \\ -b \\ 1 \\ 0 \\ 0 \end{matrix}\right] \ \
s_2 =\left[ \begin{matrix} -c \\ -d \\ 0 \\ -e \\ 1 \end{matrix}\right] \\
step \ \ 3 \Downarrow \\
N(A) = N(U) = N(R) = all \ \ combinations \ \ of \ \ s_1 \ \ and \ \ s_2.
\]
3.5 The Complete solutions : Ax=b or Rx = d
Key notes:
- Complete solution to Ax=b : x = (one particular solution \(x_p\)) + (any \(x_n\) in the nullspace).
- Elimination on [A b] leads to [R d]. Then Ax=b is equivalent to Rx=d.
- Ax = b and Rx=d are solvable only when all zero rows of R have zeros in d.
- When Rx=d is solvable, one very particular solution \(x_p\) has all free variables equal to zero.
- A has full rank r=n when its nullspace N(A) = zero vector : no free variables.
- A has full row rank r = m when its column space C(A) is \(R^m\) : Ax=b is always solvable.
Solution steps:
- Produce the augmented matrix [A b]
- Get Elimination form [R d]
- Set free variables = 0, and get a particular solution -- \(x_p\)
- Set free variables = 1 or 0,and get n - r special solutions -- \(x_n\)
- Complete solution: \(x = x_p + x_n\)
example:
\Downarrow \\
\left [ \begin{matrix} 1&3&0&2 \\ 0&0&1&4 \\ 1&3&1&6 \end{matrix}\right]
\left [ \begin{matrix} x_1 \\ x_2 \\ x_3 \\ x_4 \end{matrix}\right]
= \left [ \begin{matrix} 1 \\ 6 \\ 7 \end{matrix}\right] \\
\Downarrow \\
[A \ \ b] = \left [ \begin{matrix} 1&3&0&2&1 \\ 0&0&1&4&6 \\ 1&3&1&6&7 \end{matrix}\right] \\
\Downarrow \\
[R \ \ d] = \left [ \begin{matrix} 1&3&0&2&1 \\ 0&0&1&4&6 \\ 0&0&0&0&0 \end{matrix}\right] \\
\Downarrow \\
Pivot \ \ variables(x_1, x_3) = 1, 6 \\
Free \ \ variables (x_2, x_4) = 0, 0 \\
Solution \ \ x_p = (1, 0, 6, 0) \\
\Downarrow \\
Free \ \ variables (x_2, x_4) = 1 \ \ or \ \ 0 \\
s_1 = [-3, 1, 0, 0] \\
s_2 = [-2, 0, -4, 1] \\
x_n =c\left [ \begin{matrix} -3 \\ 1 \\ 0 \\ 0 \end{matrix}\right] + d\left [ \begin{matrix} -2 \\ 0 \\ -4 \\ 1 \end{matrix}\right] \\
\Downarrow \\
x = x_p + x_n = \left [ \begin{matrix} 1 \\ 0 \\ 6 \\ 0 \end{matrix}\right] +
c\left [ \begin{matrix} -3 \\ 1 \\ 0 \\ 0 \end{matrix}\right] +
d\left [ \begin{matrix} -2 \\ 0 \\ -4 \\ 1 \end{matrix}\right]
\]
The four possibilities for linear equations depend on the rank k :
- r = m = n , square and invertible, \(R = [I]\),Ax = b has 1 solution (unkowns=equations)
- r = m < n, short and wide, \(R = [I \ \ F]\),Ax = b has infinite solutions (unkowns > equations)
- r = n < m,Tall and thin,\(R = \left [ \begin{matrix} I \\ F\end{matrix}\right]\), Ax = b 0 or 1 solutions (unkonwns < equations)
- r < n and r < m,not full rank,\(R = \left [ \begin{matrix} I&F \\ 0&0 \end{matrix}\right]\), Ax=b has 0 or infinite solutions
3.6 Independence, Basis and Dimension
Independent
- Independent columns of A : The only solution to Ax=0 is x=0, the nullspace is Z.
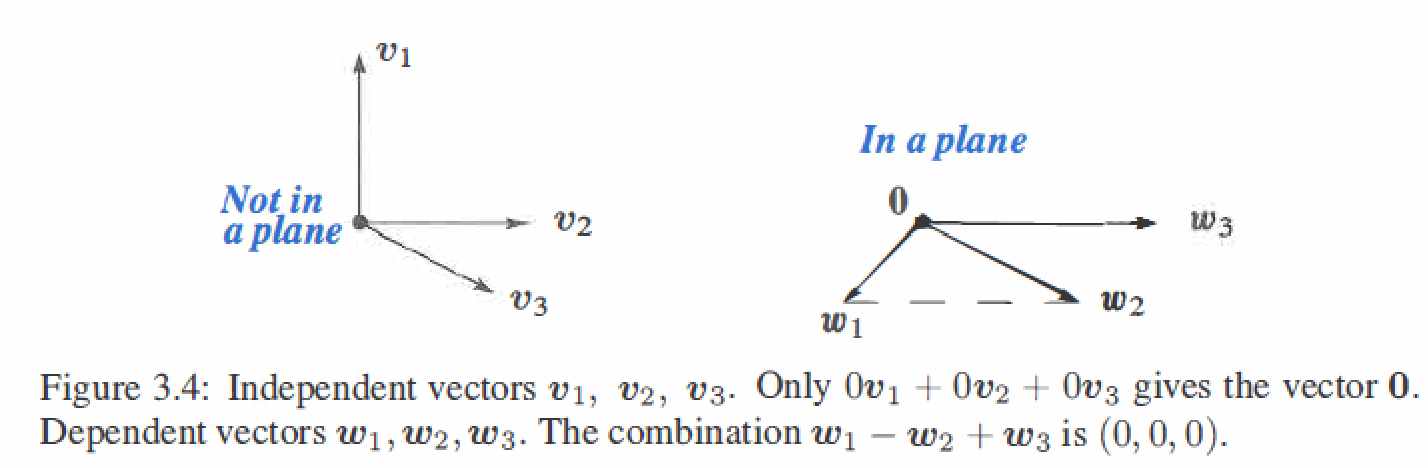
- Independent vectors : The only zero combination \(c_1v_1 + c_2v_2 + ... + c_kv_k = 0\) has all c's = 0.
- A matrix with m<n has dependent columns : At least n-m free variables/special solutions.
Basis
A basis for a vector space is a sequence of vectors with two properties:
- The basis vectors are linearly independent.
- They span the space.
- The rows are in \(R^n\) spanning the row space.
- The columns are in \(R^m\) spanning the column space.
Every vector \(v\) in the space is a combination of the basis vectors, because they span the space, and there is only one way to write \(v\) as a combination of the basis vectors.
The pivot columns of A are a basis for its column space. The pivot rows of A are a basis for its row space. So are the pivot rows of its echelon form R.
- a basis of \(C(A)\) = pivots columns of A.
- a basis of \(C(A^T)\) = pivots rows of A.
example:
\quad reduces
\quad to
\quad
R = \left[ \begin{matrix} 1&2 \\ 0&0 \end{matrix}\right]
\]
The column spaces of A and R are different and their bases are different.
Column 1 of R is the pivot column, which alone is a basis for C(R): \(\left[ \begin{matrix} 1 \\ 0\end{matrix} \right]\)
Column 1 of A is the pivot column, which alone is a basis for C(A): \(\left[ \begin{matrix} 2 \\ 3\end{matrix} \right]\)
Row 1 of R is the pivot row, which alone is a basis for \(C(R^T)=C(A^T)\): \(\left[ \begin{matrix} 1&2 \end{matrix} \right]\)
Dimension
The dimension of a space is the number of vectors in every basis.
Bases for Matrix Spaces and Function Spaces
Matrix spaces:
- The vector space M contains all n by n matrices, its dimension is \(n^2\).
- The dimension of the subspace of upper triangular matrices is \(1/2n^2 + 1/2 n\).
- The dimension of the subspace of diagonal matrices is n.
- The dimension of the subspace of symmetric matrices if \(1/2n^2 + 1/2 n\).
example:
One basis
\left[ \begin{matrix} 0&1 \\ 0&0 \end{matrix}\right],
\left[ \begin{matrix} 0&0 \\ 1&0 \end{matrix}\right],
\left[ \begin{matrix} 0&0 \\ 0&1 \end{matrix}\right]
\]
Every A combines the basis matrices
\]
Function spaces:
- \(y''=0\) is solved by any linear function \(y = cx + d\),the space bases has x and 1.
- \(y'' = -y\) is solved by any combination \(y= csinx + dcosx\), the space bases has \(sinx\) and \(cosx\).
- \(y'' = y\) is solved by any combination \(y=ce^x + de^{-x}\),the space bases has \(e^x\) and \(e^{-x}\).
3.7 Dimensions of the Four Subspaces
Keys notes:
The column space is \(C(A)\),a subspace of \(R^m\), has a dimensions r,\(r=pivot \ \ columns\)
The row space is \(C(A^T)\),a subspace of \(R^n\), has a dimensions r, \(r=pivot \ \ rows\)
The nullspace is \(N(A)\),a subspace of \(R^n\), has a dimensions \(n-r\), numbers of free variables
The left nullspace is \(N(A^T)\),a subspace of \(R^m\), has a dimensions \(m-r\), numbers of free rows
example : Ax = b
\quad reduces \ \ to \ \
R = \left[ \begin{matrix} 1&0&0&-1 \\ 0&1&0&-1 \\ 0&0&1&-1 \\ 0&0&0&0 \\ 0&0&0&0 \end{matrix}\right]
\]

- The column space \(C(A)\) : r = 3 independent columns, a basis is the columns 1,2,3 of A.
- The row space \(C(A^T)\) : r = 3 independent rows, a basis is the rows 1,2,4 of A or R. (\(P_{34}EA=R\))
- The nullspace N(A) : Set b = 0, N(A) = N(R),n - r = 4 - 3 = 1 free variables, x = (1, 1, 1, 1) is the basis for N(A).
- The nullspace \(N(A^T)\) :
- m-r = 5 - 3 = 2 dimensions;
- Solve \(A^Ty = 0\),combinations of the rows give zero, get special solutions \(y_1 = (1, -1, 1, 0, 0), y_2 = (0,0,-1,1,-1)\),a basis of \(N(A^T)\) is \(y_1, y_2\).
- If EA=R, the last m-r rows of R are a basis for the left nullspace of A.
3.8 Rank One Matrices
Every rank one matrix is one column times one row : \(A=uv^T\)
\[\left[ \begin{matrix} 2&3&7&8 \\ 2a&3a&7a&8a \\ 2b&3b&7b&8b \end{matrix} \right]
= \left[ \begin{matrix} 1 \\ a \\ b \end{matrix} \right] \left[ \begin{matrix} 2&3&7&8 \end{matrix} \right]
= uv^T
\]Every rank r matrix is a sum of r rank one matrices.
\[A =\left[ \begin{matrix} &&& \\ u_1&u_2&u_3 \\ &&& \end{matrix} \right]
\left[ \begin{matrix} v_1^T \\ v_2^T \\ zero \ \ row \end{matrix} \right]
= u_1v_1^T + u_2v_2^T\\rank_A = rank1 + rank1
\]
3. Vector Spaces and Subspaces的更多相关文章
- 【读书笔记】:MIT线性代数(2):Vector Spaces and Subspaces
Vector Space: R1, R2, R3,R4 , .... Each space Rn consists of a whole collection of vectors. R5 conta ...
- 向量空间(Vector Spaces)
向量空间(Vector Spaces) 向量空间又称线性空间,是线性代数的中心内容和基本概念之一.在解析几何里引入向量的概念后,是许多问题的处理变得更为简洁和清晰,在此基础上的进一步抽象化,形成了与域 ...
- Linear Algebra lecture6 note
Vector spaces and subspaces Column space of A solving Ax=b Null space of A Vector space requiremen ...
- Linear Algebra Lecture5 note
Section 2.7 PA=LU and Section 3.1 Vector Spaces and Subspaces Transpose(转置) example: 特殊情况,对称 ...
- 线性代数导论 | Linear Algebra 课程
搞统计的线性代数和概率论必须精通,最好要能锻炼出直觉,再学机器学习才会事半功倍. 线性代数只推荐Prof. Gilbert Strang的MIT课程,有视频,有教材,有习题,有考试,一套学下来基本就入 ...
- 【读书笔记】:MIT线性代数(5):Four fundamental subspaces
At the beginning, the difference between rank and dimension: rank is a property for matrix, while di ...
- Discrete.Differential.Geometry-An.Applied.Introduction(sig2013) 笔记
The author has a course on web: http://brickisland.net/DDGSpring2016/ It has more reading assignment ...
- 【Math for ML】线性代数之——向量空间
I. Groups 在介绍向量空间之前有必要介绍一下什么Group,其定义如下: 注意定义中的\(\bigotimes\)不是乘法,而是一种运算符号的统一标识,可以是乘法也可以是加法等. 此外,如果\ ...
- 特征向量-Eigenvalues_and_eigenvectors#Graphs 线性变换
总结: 1.线性变换运算封闭,加法和乘法 2.特征向量经过线性变换后方向不变 https://en.wikipedia.org/wiki/Linear_map Examples of linear t ...
- [线性代数] 矩阵代数基础 Basic Matrix Algebra
Overview: Matrix algebra Matrix algebra covers rules allowing matrices to be manipulated algebraical ...
随机推荐
- 第122篇: JS函数一些基本概念
好家伙,本篇为<JS高级程序设计>第十章"函数"学习笔记 1.函数的三种定义方式:函数表达式.函数声明及箭头函数 函数声明: function sum(a) { ret ...
- Spring Boot+Thymeleaf+MyBatis--推荐一个后端练手极佳的商城项目
项目整体架构 newbee-mall ├── src/main/java └── ltd.newbee.mall ├── common // 存放相关的常量配置及枚举类 ├── config // 存 ...
- Autofac入门与替代ASP.NET Core、ABP依赖注入容器
目录 Autofac 的使用 1,简单的实践 2,注册组件 3,Lambda 注册组件 4,注册泛型 5,属性注入 6,解析服务 7,生命周期 8,实例作用域 9,Autofac 其它需要学习的知识 ...
- VC-MFC 在磁盘中读取文件
1 // ReadDlg.cpp : 实现文件 2 // 3 4 #include "stdafx.h" 5 #include "Read.h" 6 #incl ...
- python用matplotlib或boxplot作图的时候,中文标注无法正常显示,乱码为小方框的解决办法
第一种 import matplotlib.pyplot as plt plt.rc("font",family="SimHei",size="22& ...
- java项目-尚硅谷项目三员工调度系统
导入工具类和数据 创建TeamSchedule项目,com.atguigu.team. view,com.atguigu.team.service,com.atguigu.team.domain包 , ...
- html5与css3新特性
HTML5新特性 增加了一些新的标签.新的表单以及新的表单属性等 这些新特性都有兼容性问题,基本上IE9+以上版本浏览器才支持,如果不考虑兼容性问题,可以大量使用这些新特性 新增语义化标签 - < ...
- 添加 alt + d 打开 dicts.cn 网址
代码 autohotkey 代码 限制在双核浏览器 内部使用 #IfWinActive ahk_exe ChromeCore.exe !d:: Run, http://www.dicts.cn/ Re ...
- windows10 中为文件添加让自己可以使用查看、修改、运行的权限
在Win10中添加权限的方法 前一段时间重装了系统,然后,突然间就因为权限原因没法查看一些文件了.所以就想办法添加权限.尝试很多次后终于成功了,这篇文章记录一下如何为自己添加权限. 选中需要添加权限的 ...
- 两个int变量交换
两个变量int a,int b,不用临时变量过渡,两种方法: 第一种: a= a+b; b= a-b; a= a-b; 第二种:异或的方法,也就是位运算,两个相同的数异或是为0的. a= a^b; b ...