西门子PLC1200内使用SCL实现简化版PID算法
西门子自带的PID效果很好,但是会比较吃性能,使用次数有限,很多地方需要PID但不需要这么精准的PID,所以网上找个简单的算法自己调用。
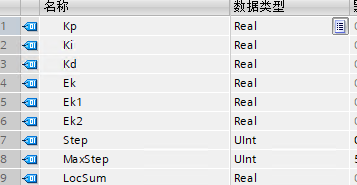
新建数据类型
前三个就是PID三个参数
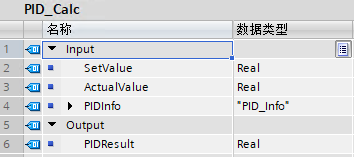
新建FC块:
#PIDInfo.Step += ;
IF #PIDInfo.Step >= #PIDInfo.MaxStep- THEN
#PIDInfo.Step := ;
#PIDInfo.Ek := #SetValue - #ActualValue;
#PIDInfo.LocSum += #PIDInfo.Ek; //累计误差
#PIDResult := #PIDInfo.Kp * #PIDInfo.Ek + (#PIDInfo.Ki * #PIDInfo.LocSum) + #PIDInfo.Kd * (#PIDInfo.Ek1 - #PIDInfo.Ek);
#PIDInfo.Ek1 := #PIDInfo.Ek;
END_IF;
调用:
DB块内增加变量

Step和MaxStep用于控制扫描多少次调用一次,以及可以错开调用

左边填入设置值,实际值,和刚才添加的变量,右边输出PID,PID输出值没有明确的范围,自己用Limite限制范围,调整P值让输出值在范围内浮动
附C#实现
class PID_Info
{
float Kp = ; //比例系数Proportional
float Ki = 0.2f; //积分系数Integral
float Kd = 0.1f; //微分系数Derivative float Ek; //当前误差
float Ek1; //前一次误差 e(k-1)
float Ek2; //再前一次误差 e(k-2)
float LocSum; //累计积分位置 public static float PID_Calc1(float SetValue, float ActualValue, PID_Info PID)
{
float PIDLoc; //位置 PID.Ek = SetValue - ActualValue;
PID.LocSum += PID.Ek; //累计误差 PIDLoc = PID.Kp * PID.Ek + (PID.Ki * PID.LocSum) + PID.Kd * (PID.Ek1 - PID.Ek); PID.Ek1 = PID.Ek;
return PIDLoc;
} public float Calc1(float SetValue, float ActualValue)
{
return PID_Calc1(SetValue, ActualValue, this);
} public static float PID_Inc(float SetValue, float ActualValue, PID_Info PID)
{
float PIDInc; //增量 PID.Ek = SetValue - ActualValue;
PIDInc = (PID.Kp * PID.Ek) - (PID.Ki * PID.Ek1) + (PID.Kd * PID.Ek2); PID.Ek2 = PID.Ek1;
PID.Ek1 = PID.Ek;
return PIDInc;
} public float Inc(float SetValue, float ActualValue)
{
return PID_Inc(SetValue, ActualValue, this);
}
}
算法来自
blog。csdn。net/weibo1230123/article/details/80812211
西门子PLC1200内使用SCL实现简化版PID算法的更多相关文章
- 线性控制原理——PID算法应用
使用控制系统(PID)控制被控对象 PID控制的三要素:控制器,被控对象,反馈器.控制器就是一个数学模型,就PID来说,等同于PID算法.是对反馈量的一个处理与输出.通俗的说就是对于每个被控的量,我的 ...
- PID算法笔记2
总所周知,PID算法是个很经典的东西.而做自平衡小车,飞行器PID是一个必须翻过的坎.因此本节我们来好好讲解一下PID,根据我在学习中的体会,力求通俗易懂.并举出PID的形象例子来帮助理解PID.一. ...
- PID算法(c 语言)(转)
PID算法(c 语言)(来自老外) #include <stdio.h> #include<math.h> //定义PID 的结构体 struct _pid { int pv; ...
- 单片机之PID算法
说到PID算法,想必大部人并不陌生,PID算法在很多方面都有重要应用,比如电机的速度控制,恒温槽的温度控制,四轴飞行器的平衡控制等等,作为闭环控制系统中的一种重要算法,其优点和可实现性都成为人们的首选 ...
- PID算法通俗理解,平衡车,倒立摆,适合不理解PID算法的人来看!
先插句广告,本人QQ522414928,不熟悉PID算法的可以一起交流学习,随时在线(PID资料再我的另一篇博客里) 倒立摆资料连接↓ https://www.cnblogs.com/LiuXinyu ...
- PID算法的理解及场景模拟
增量式PID算法的简化版之后的公式: △u(t)=Ae(t)-Be(t-1)+Ce(t-2) △u:PID控制器输出的下一时刻的调整量 e(t):PID控制器在当前时刻的状态变化量-给定值 e(t-1 ...
- 023_STM32之PID算法原理及应用
(O)关于程序BUG说明,看最后面的红色字体,视频和源代码中都没有说明 (一)PID控制算法(P:比例 I:积分 D:微分) (二)首先先说明原理,使用的是数字PID算法,模拟PID算法在计算机这样的 ...
- 某科学的PID算法学习笔记
最近,在某社团的要求下,自学了PID算法.学完后,深切地感受到PID算法之强大.PID算法应用广泛,比如加热器.平衡车.无人机等等,是自动控制理论中比较容易理解但十分重要的算法. 下面是博主学习过程中 ...
- 广告成本控制-PID算法
今天我们来聊聊广告成本控制中常用的PID算法. 0.PID算法简介 首先我们可以看下维基百科中给PID算法的定义:由比例单元(Proportional).积分单元(Integral)和微分单元(Der ...
随机推荐
- anyproxy学习3-修改返回内容(beforeSendResponse)
前言 fiddler可以抓包打断点后,修改返回的内容,便于模拟各种返回结果.anyproxy也可以通过写rule模块规则,模拟返回状态码.头部.body beforeSendResponse befo ...
- SQL异常总结
1.resultType和resultMap写错时,启动时就会报错 原因: 2.The error occurred while handling results ### SQL: select US ...
- K-means:如何选择K(cluster的数目)
目前决定cluster数目的常用方法是手动地决定cluster的数目 哪个K是正确的? 上图中的数据集,我们可以说它有4个clusters,也可以说它有2个clusters,但哪个是正确答案呢?其实这 ...
- 【Selenium-WebDriver实战篇】java测试使用HttpClient debug日志关闭
在上一篇设置完Tess4J之后,引用jar包之前,我的日志体系一直是只出现info级别的,但是引用之后出现很多httpClient的请求. 于是网上调查了下,可以通过代码实现,就在入口程序增加该部分代 ...
- shell脚本 mysql主从
#!/bin/bash systemctl stop firewalld setenforce user="tom" password=" slave_ipaddr=&q ...
- 极限挑战----3小时完成OA系统(失败)
今天老师要求三小时把OA系统做出了,之前一点也没接触过,对其不了解,而且这几天一直把时间放在六级了,对Web重视有点少. 最终我只做了登录和校验,可以显示富文本框,但不能提交数据库. 总之还有还多没有 ...
- BZOJ 4103: [Thu Summer Camp 2015]异或运算 可持久化trie
开始想了一个二分+可持久化trie验证,比正解多一个 log 仔细思考,你发现你可以直接按位枚举,然后在可持久化 trie 上二分就好了. code: #include <bits/stdc++ ...
- Windbg妙用
计算器 当你在调试,需要做一些从十六进制到十进制的简单转换,一些整数计算你不需要切换到calc.exe,你可以只使用windbg的表达式计算器.假设你得到了一个十六进制的大小,比如说2e903000, ...
- cube.js 学习 cube docker-compose 运行
cube.js 官方为我们也提供了backeng 部署的模型,为了测试方便以下是一个使用docker-compose 运行的demo 项目是一个集成gitbase 的demo,实际可以按照自己的项目修 ...
- HTML5 Geolocation(地理定位)
一.背景 在HTML规范中,增加了获取用户地理信息的API,这样使得可以基于用户位置开发互联网应用,即基于位置服务 鉴于该特性可能侵犯用户的隐私,除非用户同意,否则用户位置信息是不可用的. Inter ...