奥比中光3D视觉传感器--OpenNI 2配置
PrimeSense是Kinect一代的芯片供应商,位于以色列,也是开源体感开发包OpenNI 的维护者。自从被 Apple 收购后,销声匿迹,OpenNI 也停止更新。现在可以从网站http://structure.io/openni下载到OpenNI 2 SDK和文档。
本人之前使用过华硕的Xtion Pro摄像头,不过由于其也使用了PrimeSense的技术,现在已经停产了,但是还可以在淘宝上面买到。

目前一家位于中国深圳的企业奥比中光,成为继Primesense(苹果收购)、Microsoft、Intel后,全球第四家量产全自主知识产权3D传感器厂商。深圳奥比中光科技有限公司,成立于2013年,总部设立在深圳,在上海、广州、美国Seattle和Troy均设有分部。奥比中光3D传感在智能客厅、机器人、AR/VR、智能安防、辅助驾驶等不同领域都有超强应用。
下面这款乐视3D体感摄像头就是使用的奥比中光的技术:

其性能参数如下:

可以看出,摄像头只能检测出0.4~8米范围内的物体的深度:

在其英文网站https://orbbec3d.com/develop/上提供了Windows、Linux、MacOS等系统下的SDK。二次开发可以使用OpenNI 2或者奥比中光自己的Orbbec Astra SDK。如果有技术问题也可以在网站:https://3dclub.orbbec3d.com/上找到解答。下面简单记录一下在Windows 7和Ubuntu 14.04的64位系统下配置OpenNI 2开发环境的步骤。
- Windows
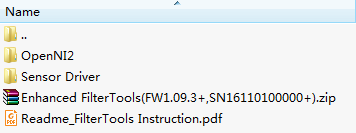
进入下载页面,下载Windows下的驱动和OpenNI 2

下载后解压文件,安装Sensor Driver文件夹中的驱动安装程序
然后就可以按照OpenNI 2的帮助文档配置Visual Studio项目属性:

这里需要注意一点,在奥比中光英文网站下载的OpenNI 2文件夹中Redist\OpenNI2\Drivers下有两个文件:orbbec.dll和orbbec.ini
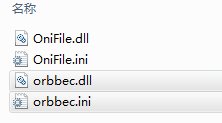
而在structure.io或PCL等网站上下载的OpenNI的对应文件中没有这两个文件。如果要使用从别处下载的OpenNI,需要将上述两个文件复制到Redist\OpenNI2\Drivers文件夹中才能正常使用,否则会提示找不到摄像头。
- Ubuntu
我们可以在网址Universal Download Thread for Astra Series Cameras下载OpenNI 2 for Linux,这个网站在国外,下载链接可能打不开,可以科学上网进行下载...注意要根据你的系统信息选择合适的驱动,我的电脑是64位Ubuntu 14.04系统,因此选择OpenNI-Linux-x64-2.3.zip。注意这里有一个Readme.txt文件,这个文件提供了Linux系统下的安装使用说明。

如果不理解英文说明,可以参考CSDN上的文章:turtlebot3D传感器的配置,或 奥比中光Orbbec Astra Pro RGBD 3D视觉传感器在ROS使用说明
下面就记录下容易出错的地方:
1. 要运行带图形界面的示例程序(比如SimpeViewer),需要额外安装freeGLUT库。如果只是运行命令行程序(如SimpleRead),则不必安装
# To run visual samples(e.g., SimpleViewer), you will need freeglut3 header and libaries, please install:
$ sudo apt-get install build-essential freeglut3 freeglut3-dev
2. 要给安装文件install.sh加上可执行权限。运行安装脚本,可以产生OpenNIDevEnvironment,其中包含了OpenNI的开发环境
# run install.sh to generate OpenNIDevEnvironment, which contains OpenNI development environment
#(sudo chmod a+x install.sh)
$ sudo ./install.sh
3. 添加环境变量,OpenNI要依据一些环境变量来定位文件。
# add environment variables
$ source OpenNIDevEnvironment
4. 可以在Samples的对应文件夹中使用make生成示例程序,或者直接运行Samples/Bin中已有的示例程序,注意要添加可执行权限。另外我是在VMware虚拟机上的Ubuntu系统中执行的上述操作,运行时显示错误信息:无法找到摄像头。后来发现需要在虚拟机软件中连接到可移动设备才能正常使用。注意,摄像头连接到虚拟机中的Ubuntu后会与Win7系统断开:
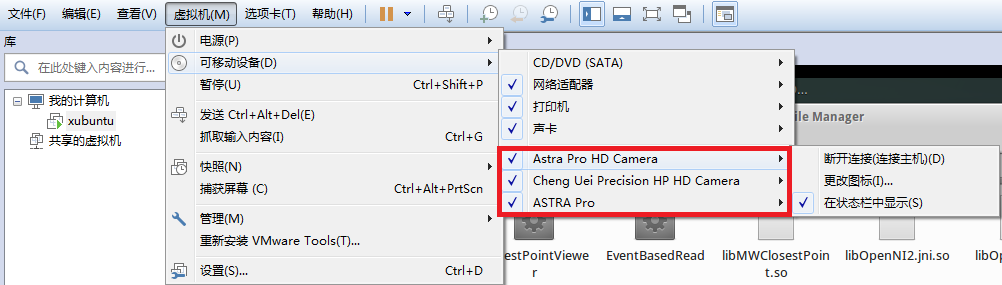
将可移动设备与虚拟机断开后,虚拟机右下角状态栏中的设备图标会变灰色:

# run sample
# connect sensor
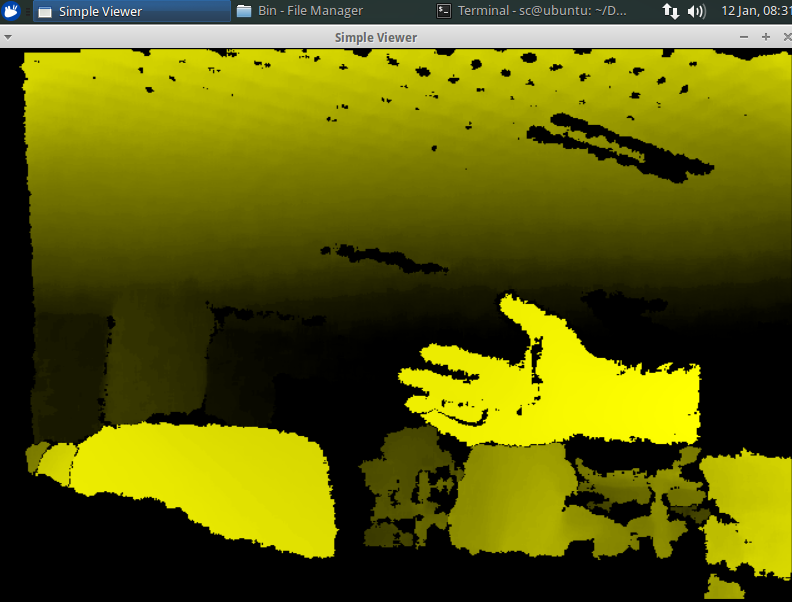
$ ./SimpleViewer # now you should be able to see a GUI window showing the depth stream video
参考:
Universal Download Thread for Astra Series Cameras
体感设备:因特尔 Intel RealSense R200,乐视LeTV Pro Xtion和Orb奥比中光bec Astra比较
奥比中光3D视觉传感器--OpenNI 2配置的更多相关文章
- 奥比中光Orbbec Astra Pro RGBD 3D视觉传感器在ROS(indigo和kinetic)使用说明 rgb depth同时显示
Orbbec Astra Pro传感器在ROS(indigo和kinetic)使用说明 rgb depth同时显示 这款摄像头使用uvc输入彩色信息,需要libuvc和libuvc_ros这样才能在R ...
- 3D视觉基础(基本原理及3D传感器基本参数)
本人所在行业属于3D视觉方向,因此最近也是学习了很多3D视觉的知识,这次专门总结一下. 传统工业机器视觉中,2D指的是X方向加Y方向,那么3D视觉自然就是加了一个Z方向.目前我接触到的公司产品是3D激 ...
- V-rep学习笔记:视觉传感器2
视觉传感器的属性设置栏中还有如下几个选项: Ignore RGB info (faster): if selected, the RGB information of the sensor (i.e. ...
- V-rep学习笔记:视觉传感器1
Vision sensors, which can detect renderable entities(Renderable objects are objects that can be seen ...
- 奥比中光Astra Pro在ROS系统中的使用
奥比中光Astra Pro在ROS系统中的使用 上一次介绍了Astra Pro在ubuntu中的使用,由于Astra Pro使用uvc传输彩色图像,所以当用rqt_image_view窗口 时,看不到 ...
- 3D视觉 之 线激光3D相机
1 3D 视觉 常见的三维视觉技术,包含双目.ToF.激光三角.结构光等,如下图: 1)毫米级 双目.ToF.结构光(散斑)的精度为 mm 级,多见于消费领域,如:导航避障,VR/AR,刷脸 ...
- 体感设备:因特尔 Intel RealSense R200,乐视LeTV Pro Xtion和Orb奥比中光bec Astra比较
最近调试三个个厂家的体感设备,第一个是Intel的RealSense R200(参数规格:分辨率:1080p,深度有效距离:0.51-4,USB3.0),第二个是乐视LeTV Pro Xtion(参数 ...
- [3d跑酷] Xcode5 打包 发布配置
主题 Unity导出Xcode项目,使用Xocde打包ipa并提交到AppStore xcode发布配置 1.设置发布相关参数,比如 包名,版本,证书,ios设备版本 2.设置体系结构,支持的平台(I ...
- 奥比中光Astra Pro的使用(1)
在ubuntu上的使用 首先下载SDK以及OpenNI安装包,下载地址: 解压两个安装包 切换目录到AstraSDK-Linux下的install目录,并输入命令:sudo sh ./install. ...
随机推荐
- [Android Security] APK自我保护 - DEX/APK校验
cp : https://segmentfault.com/a/1190000005105973 DEX校验 classes.dex 是 Android 虚拟机的可执行文件,我们所写的 java 代码 ...
- Prometheus 初体验
本文环境 Redhat Linux 6.7, Prometheus 2.2.1,node_exporter 1.5.2 介绍 Prometheus 是2012年由 SoundCloud 开源的系统监控 ...
- Linux文本行倒序排列6种方法
Linux文本行倒序排列6种方法 1. 命令方法: nl filename | sort -nr | cut -f2 这个方法很unix风格,使用多命令组合完成某种功能是典型的unix特点 单命令: ...
- .NetCore中EFCore for MySql整理
一.MySql官方提供了Ef Core对MySql的支持,但现在还处于预览版 Install-Package MySql.Data.EntityFrameworkCore -Pre Install-P ...
- Grizzly HTTP CoDec ThreadCache 浅析
Grizzly 的 HTTP CoDec 实现方法更 Netty 的 CoDec 完全不同, 他们思想上的差异主要在于: 1. 解码方式 Grizzly 使用流式解码, 它的HttpHeader对象内 ...
- String hashCode 方法为什么选择数字31作为乘子
1. 背景 某天,我在写代码的时候,无意中点开了 String hashCode 方法.然后大致看了一下 hashCode 的实现,发现并不是很复杂.但是我从源码中发现了一个奇怪的数字,也就是本文的主 ...
- scrapy框架系列 (2) 一个简单案例
学习目标 创建一个Scrapy项目 定义提取的结构化数据(Item) 编写爬取网站的 Spider 并提取出结构化数据(Item) 编写 Item Pipelines 来存储提取到的Item(即结构化 ...
- 会动的文字Marquee应用(转)
想要做个滚动公告,看了网上的教程,无一不是很恐怖的场频啊java语言编制的JS,或者就是各种复杂,无意中发现了Marquee这东西,用了一下,很简单,只需两行代码,即可以实现很好的效果,特此分享一下. ...
- Android -- View流程
在自定义view中打log,view的显示共有三种,visible.invisible和gone,分别看一下log: gone onVisibilityChanged construct 2 para ...
- 推文《阿里凑单算法首次公开!基于Graph Embedding的打包购商品挖掘系统解析》笔记
推文<阿里凑单算法首次公开!基于Graph Embedding的打包购商品挖掘系统解析>笔记 从17年5月份开始接触Graph Embedding,学术论文读了很多,但是一直不清楚这技术是 ...