Mixed Precision Training —— caffe-float16
简介
最近有了突如其来的想法,如何把caffe的变得更小更快。后来翻到Nvidia开发caffe-float16,同时也看到它的论文。看完大致了解一番后,就做一下记录。
该工作的目标是,减少网络的所需的内存大小和提升网络的 inference(推理)速度。nvidia通过才用自己开发的 float16 半精度 cuda_fp16.h 数据类型,在forward和backward propagation中代替 float 32 bits的单精度数据类型。因此,在降低网络的数据的 precision 时候,导致产生了网络 accuracy 降低和 gradient 消失无法收敛的问题。当然,我在这里并不想重复的写出文中所有的点(因为其中总体的idea在量化quantization 方面是“general” 的),仅对该工作我觉得特有的点或感兴趣的点进行简述。
Mixed Precision
在caffe-float16 中的Blob重写,改为data和diff分别用不同的数据类型表示,这可以选着你所需的精确的数据类型:
//blob.hpp
protected:
Blob(Type data_type, Type diff_type)
: data_tensor_(make_shared<Tensor>(data_type)),
diff_tensor_(make_shared<Tensor>(diff_type)),
count_(0) {}
而Master-Weights(F32)-->float2half的实现就是每次this->blobs_[0]->template gpu_data<Ftype>(); 中做一次类型转换:
//conv_layer.cu
const Ftype* weight = this->blobs_[0]->template gpu_data<Ftype>();
//blob.hpp
template<typename Dtype>
const Dtype* gpu_data() const {
convert_data(tp<Dtype>());
return static_cast<const Dtype*>(data_tensor_->synced_mem()->gpu_data());
}
void convert_data(Type new_data_type) const {
data_tensor_->convert(new_data_type);
}
//tensor.cpp
void Tensor::convert(Type new_type) {
if (new_type == type_) {
return;
}
const shared_ptr<SyncedMemory>& current_mem = synced_mem();
shared_ptr<SyncedMemory>& new_mem = synced_arrays_->at(new_type);
if (!new_mem || !new_mem->is_valid()) {
const std::size_t new_cap = even(count_) * tsize(new_type);
if (!new_mem || new_mem->size() != new_cap) {
new_mem = make_shared<SyncedMemory>(new_cap);
}
const bool data_gpu = Caffe::mode() == Caffe::GPU;
if (current_mem->head() != SyncedMemory::UNINITIALIZED) {
copy_helper(data_gpu, count_,
data_gpu ? current_mem->gpu_data() : current_mem->cpu_data(),
type_,
data_gpu ? new_mem->mutable_gpu_data() : new_mem->mutable_cpu_data(),
new_type);
}
} // we just trust its current status otherwise
type_ = new_type;
new_mem->validate();
}
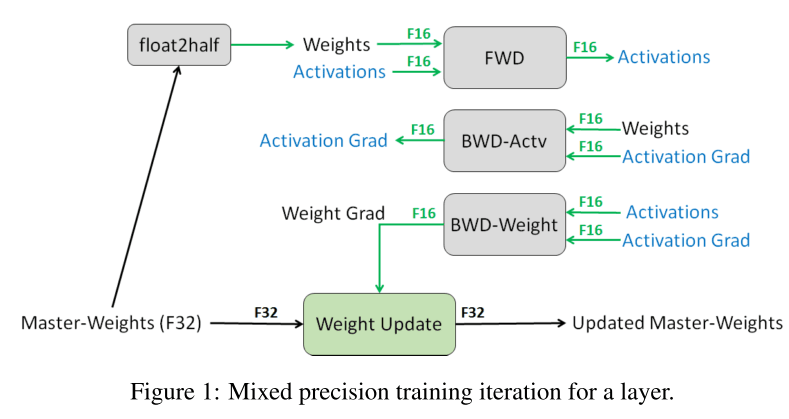
神经网络的 quantization 一般可分 activation、weight 部分,当然也存在继续对不同类型 layer 的 weghit 进行 quantization 的。而 Nvidia 则提出了 gradient 也是要 quantization 。上图是文中的整个方法的流程图,为了防止用无法拟合,采用全精度的 flaot32 来保存完整的权重信息(其他文章又叫 full precision shadow weight ),每次 forward 是都做copy 和 round/quantization 。 这是有两个原因:
- 因为 gradient x learning rate < \(2^{-24}\) ,小于float16 范围,导致梯度消失无法更新。
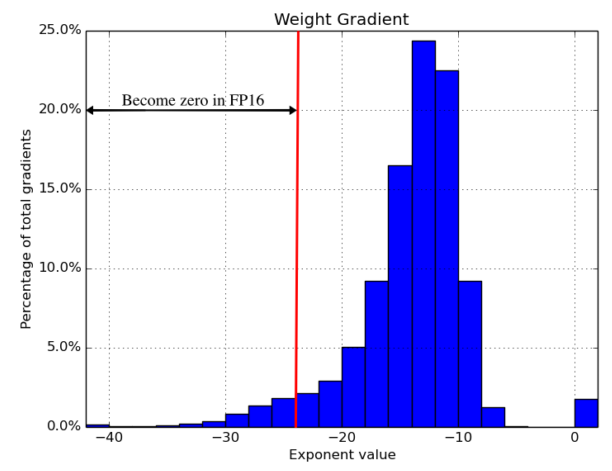
2.由于浮点型的特性,相加时会进行小数点对齐(即对其 exponent)。由于float16 表示的weight 与 float16表示的 gradient 相差2048倍(因为float16 的 mantissa 只有 10bits,有右移超过11bits ,即2048倍),则 gradient 变成0。float16 各个部分:
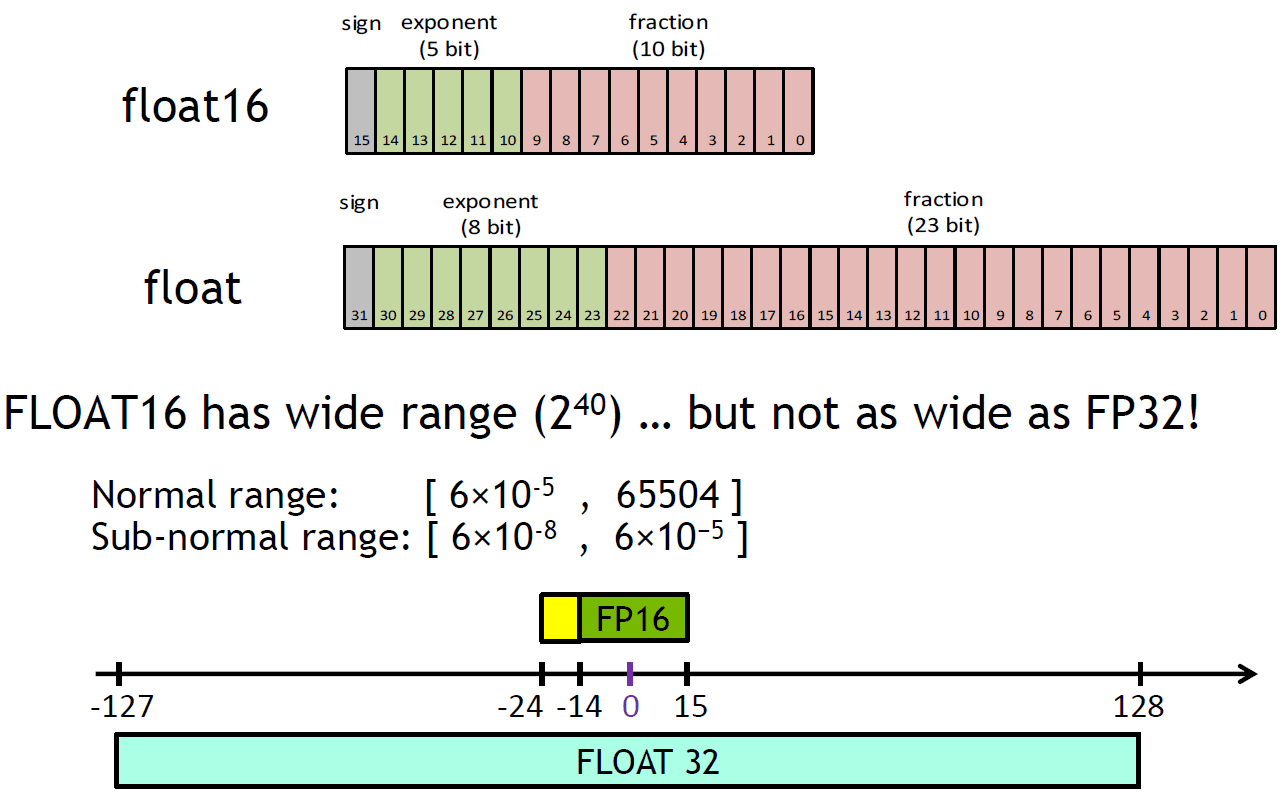
除非指数位全是0,否则就会假定隐藏的起始位是1。因此只有10位 mantissa在内存中被显示出来,而总精度是11位。据IEEE 754的说法,虽然尾数只有10位,但是尾数精度是11位的(log10(211) ≈ 3.311 十进制数).
而Weight Update,会对diff进行类型转换
//blob.hpp
// The "update" method is used for parameter blobs in a Net, which are stored
// as TBlob<float> or TBlob<double> -- hence we do not define it for
// TBlob<int> or TBlob<unsigned int>.
void Blob::Update() {
convert_diff(data_type()); // align data&diff types
shared_ptr<SyncedMemory>& data_mem = data_tensor_->mutable_synced_mem();
const shared_ptr<SyncedMemory>& diff_mem = diff_tensor_->synced_mem();
// We will perform update based on where the data is located.
switch (data_mem->head()) {
case SyncedMemory::HEAD_AT_CPU:
// perform computation on CPU
cpu_axpy(count_, data_type(), -1.F,
diff_mem->cpu_data(), data_mem->mutable_cpu_data());
break;
case SyncedMemory::HEAD_AT_GPU:
case SyncedMemory::SYNCED:
#ifndef CPU_ONLY
gpu_axpy(count_, data_type(), -1.F,
diff_mem->gpu_data(), data_mem->mutable_gpu_data());
#else
NO_GPU;
#endif
break;
default:
LOG(FATAL) << "Syncedmem not initialized.";
}
CHECK(is_current_data_valid());
CHECK(is_current_diff_valid());
}
Lose Scaling
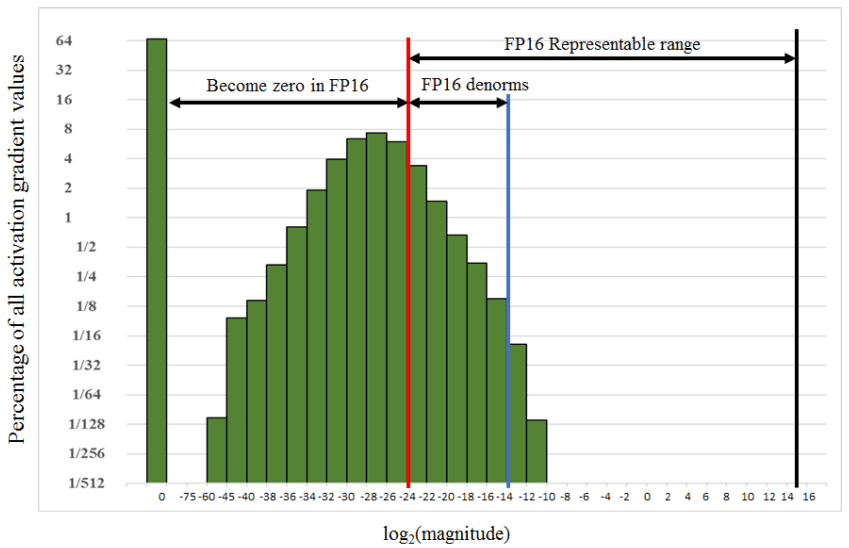
从上面float16 各个部分位宽可以得到,float16 可以表示的范围是\([2^{-24},2^{15}]\)(exponent表示范围是\([2^{-14},2^{15}]\),其中 mantissa是10bits)。但是 activation的 gradient的分布却在 \([2^{-60},2^{-10}]\),在float16 中有非常大的表示范围并没用,同时导致大多数的activation gradient变成0。因此,对activation gradient在forward后,backward propagation前做scaling/shift 。并且,在链式法则backward propagation 中的所有activation gradient按想用的量进行scaling。
具体操作(因为activation gradient做scaling,那么也要对learning rate和weight_decay做scaling):
#caffe train_val.prototxt
#To sfift gradients dE/dX we will scale up the loss function by constant (e.g. by 1000):
layer {
type: "SoftMaxWithLoss"
loo_weight: 1000.
}
#and adjust learning rate and weights decay accordingly
base_lr: 0.00001 #(original value is 0.01, 0.01 / 1000)
weight_decay: 0.5 #(original value is 0.0005, 0.5 * 1000)
其中decay_weight公式为:
\]
而在softmax_loss_layer.cu的实现为:
template <typename Ftype, typename Btype>
void SoftmaxWithLossLayer<Ftype, Btype>::Backward_gpu(const vector<Blob*>& top,
const vector<bool>& propagate_down, const vector<Blob*>& bottom) {
...
float loss_weight = float(top[0]->cpu_diff<Btype>()[0]) /
get_normalizer(normalization_, valid_count);
if (this->parent_net() != NULL) {
loss_weight *= this->parent_net()->global_grad_scale();
}
caffe_gpu_scal<Btype>(prob_->count(), loss_weight , bottom_diff);
}
}
FP16 Master Weight Storage
在该论文之外,Nvidia还考虑避免每次foward都复制权重,用float16进行权重更新的问题。
- 最核心一点就是避免gradient \(\eta{{\partial E}\over \partial \omega_i}=\eta\Delta \omega_i\)消失。
那么Nvidia提出对momentum SGD 进行改进
- Compute momentum \(H\) : \(H(t+1)=m*H(t)-\lambda \Delta W(t)\)
- Update wights with \(H\): \(W(t+1)=W(t)+H(t+1)\)
假设\(\lambda\)为常数,把式①展开:
\]
\]
因此新的公式:
- Compute momentum \(H\) : \(H(t+1)=m*H(t)-\color{#F00}{\cancel{\lambda}}\Delta W(t)\)
- Update wights with \(H\): \(W(t+1)=W(t)+\color{#F00}{\lambda} H(t+1)\)
这样可以避免\(H\)在\(\lambda \Delta W(t)\)消失时,momentum不断的消失。因为新的公式避免了\(\Delta W(t)\)的消失,而且momentum会不断更新。
ps:这里Nvidia解释是 Moment works as average of gradients.
Nvidia的总结
懒癌犯了- -!!
Mixed Precision Training —— caffe-float16的更多相关文章
- [源码解析] 深度学习分布式训练框架 horovod (5) --- 融合框架
[源码解析] 深度学习分布式训练框架 horovod (5) --- 融合框架 目录 [源码解析] 深度学习分布式训练框架 horovod (5) --- 融合框架 0x00 摘要 0x01 架构图 ...
- [源码解析] 深度学习分布式训练框架 horovod (6) --- 后台线程架构
[源码解析] 深度学习分布式训练框架 horovod (6) --- 后台线程架构 目录 [源码解析] 深度学习分布式训练框架 horovod (6) --- 后台线程架构 0x00 摘要 0x01 ...
- 使用 PyTorch Lightning 将深度学习管道速度提高 10 倍
前言 本文介绍了如何使用 PyTorch Lightning 构建高效且快速的深度学习管道,主要包括有为什么优化深度学习管道很重要.使用 PyTorch Lightning 加快实验周期的六种 ...
- Bag of Tricks for Image Classification with Convolutional Neural Networks笔记
以下内容摘自<Bag of Tricks for Image Classification with Convolutional Neural Networks>. 1 高效训练 1.1 ...
- Pytorch原生AMP支持使用方法(1.6版本)
AMP:Automatic mixed precision,自动混合精度,可以在神经网络推理过程中,针对不同的层,采用不同的数据精度进行计算,从而实现节省显存和加快速度的目的. 在Pytorch 1. ...
- [源码解析] 深度学习分布式训练框架 Horovod (1) --- 基础知识
[源码解析] 深度学习分布式训练框架 Horovod --- (1) 基础知识 目录 [源码解析] 深度学习分布式训练框架 Horovod --- (1) 基础知识 0x00 摘要 0x01 分布式并 ...
- 用NVIDIA A100 GPUs提高计算机视觉
用NVIDIA A100 GPUs提高计算机视觉 Improving Computer Vision with NVIDIA A100 GPUs 在2020年英伟达GPU技术会议的主题演讲中,英伟达创 ...
- 基于OpenSeq2Seq的NLP与语音识别混合精度训练
基于OpenSeq2Seq的NLP与语音识别混合精度训练 Mixed Precision Training for NLP and Speech Recognition with OpenSeq2Se ...
- 用NVIDIA Tensor Cores和TensorFlow 2加速医学图像分割
用NVIDIA Tensor Cores和TensorFlow 2加速医学图像分割 Accelerating Medical Image Segmentation with NVIDIA Tensor ...
随机推荐
- three.js 几何体(三)
上一篇介绍了几何体的构造体参数,这篇郭先生就接着上一篇说. 1. ExtrudeGeometry挤压几何体 挤压几何体允许我们从一条形状路径中,挤压出一个Geometry.ExtrudeGeometr ...
- Monster Audio 使用教程(三)多音轨录音、播放
在工作站音轨上,把需要进行录音的音轨的录音按钮点亮,然后点击液晶屏旁边的[录音]按钮,开始录音 导出干声 如果希望录音后,导出干声(干声为录下的原始声音,不受效果器的作用),用其他宿主软件进行处理, ...
- vue学习(十七) 使用自定义指令 使文本框获得鼠标焦点
需求:当我们进入某个页面,页面中的第一个input会自动获得焦点 光标闪烁,代表可输入 <div id="app"> //v-focus 是自定义的 <input ...
- git问题解决
1.如果系统中有一些配置文件在服务器上做了配置修改,然后后续开发又新添加一些配置项的时候, 在发布这个配置文件的时候,会发生代码冲突: error: Your local changes to the ...
- [leetcode/lintcode 题解] Amazon面试题:连接棒材的最低费用
为了装修新房,你需要加工一些长度为正整数的棒材 sticks. 如果要将长度分别为 X 和 Y 的两根棒材连接在一起,你需要支付 X + Y 的费用. 由于施工需要,你必须将所有棒材连接成一根. 返回 ...
- ORACLE_19c用户密码登录失败的问题以及ORA-28040
测试环境19c 本地登录无异常,创建测试用户,电脑Plsql登录提示报错ORA-28040,处理后再次登录提示密码错误,最后重置密码再次登录OK? 通过这个问题再次测试及反思: 1.ORA-28040 ...
- Markdown显示测试
这是一个一级标题 文本1 文本2 这是一个二级标题 斜体 粗体 粗斜体 下面是分割线 上面是分割线 删除线 下划线 脚注[1] 这是一个三级标题 无序列表1 内容 无序列表2 内容 无序列表3 有序列 ...
- Java SE基础知识
Java SE面试题 目录 Java SE基础 基本语法 数据类型 关键字 面向对象 集合 集合类概述 Collection接口 List Set Map Java SE基础 基本语法 数据类型 Ja ...
- lemon使用方法
1.打开lemon,点击文件--新建比赛 2.输入比赛标题.保存文件名.比赛目录,点击确定 3.打开主文件夹,找到刚才创建的目录,双击打开 4.进入文件夹\(data\) 5.建立一个名为T1的文件夹 ...
- VulnHub靶场学习_HA: Pandavas
HA: Pandavas Vulnhub靶场 下载地址:https://www.vulnhub.com/entry/ha-pandavas,487/ 背景: Pandavas are the warr ...