【转】ROS之topic和service通信比较
实验速度
1. via topic
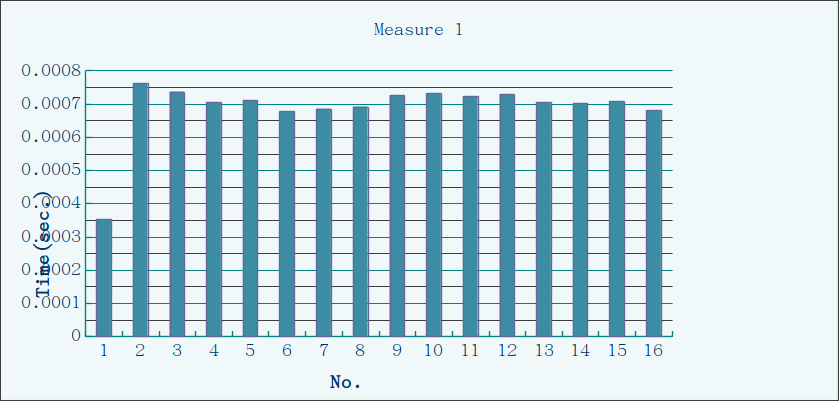
上图是以前ROS课上做的一个实验,内容是测试一个publisher和一个subscriber之间通讯所用的时间。两个node都很简单,publisher发送一个字符串,字符串带有标号;subscriber回显该字符串,字符串长度不超过20个char。
怎么去标定发送时间是接收时间呢?目前使用的方法就是在publisher发送前使用ROS_INFO输出一个消息,消息会带有ROS的时间戳;subscriber的callback函数里边也使用ROS_INFO输出一个带时间戳的消息。虽然说这种方法并不是非常精准,但目前也没有想到更好的办法了,哪怕是使用header里边的time stamp也有一个获得当前时间和赋值的过程,难以百分百精确,所以目前只能这样粗略测量。
根据实验数据可以发现在同一台机器上,两个node通过topic通讯,大致产生0.7ms的延迟。(本人机子i5-3210M/4G)
2. via service
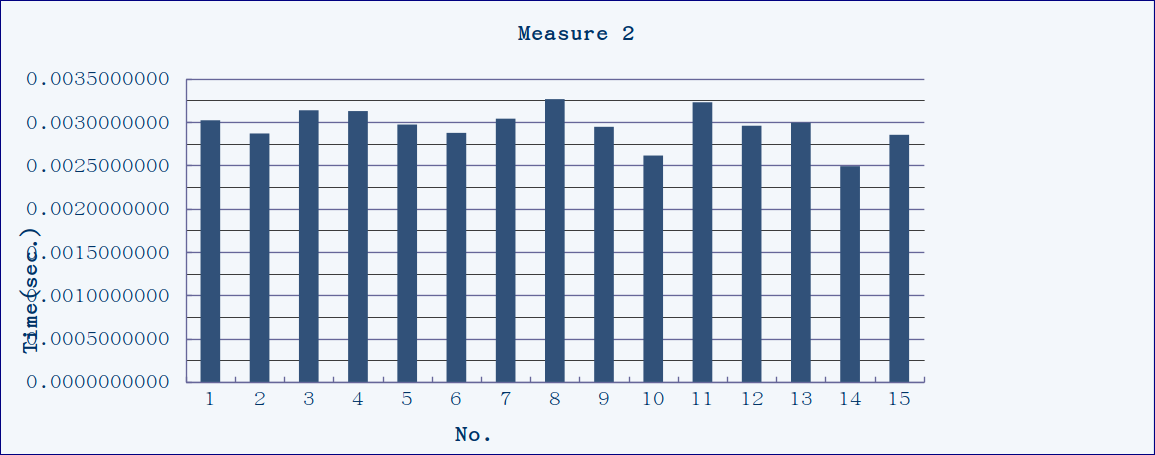
这张图是今天自己做的测试,可以看到平均时间大约在3ms左右。
测量的方法也是跟上面的类似。Client在call之前先输出一个带时间戳的消息,server在接收到请求执行操作前也会输出一个带时间戳的消息。这次client与server之间传递的消息更短,是两个int。
从上图我们不难发现,通过service通讯居然比topic延迟要高?实在是不愿意相信,因为这跟我一开始的理解是相违背的。为了控制实验环境平台的一致性(我从groovy换到了indigo),于是重做了以前的那个实验,粗测通过topic传输的延迟时间,发现依然是0.7ms左右。
理论速度
为何前面的实验结果让我如此惊讶?
官方文档中写明,client与server之间维持着一个持久连接。对于这种RPC请求/回复机制,官方给出的评价是“面对低鲁棒性的服务程序变更有着更好的性能表现”(higher performance at the cost of less robustness to service provider changes)1。
说到持久连接,不禁让人想起ROSTCP。照这么说,如果在ROS架构下node之间通讯的底层实现都是通过ROSTCP/ROSUDP的话,那理应via service应该跟via topic的速度相当,如果将“持久性”纳入考虑范围的话,service甚至应该比topic更快一些才对。但实际情况是via service的时延是via topic的4倍左右。如此大的差距,实在让人百思不得其解。
实现机制——同步与异步
其实在开始写这篇博文的时候,我都依然没有想明白这个问题。边写边查资料,看到ros answer上一位大大在描述这两种机制时,用到了asynchronous和synchronous这两个字眼2。回到宿舍一边洗着冷水澡一边在想,忽然灵光一现!是的,实验的结果是没有问题的,有问题的是我的实验方法!
- Asynchronous Topic
Topic是异步的。简简单单的一句话,里边却隐含了千言万语。让我关注起这一点的原因除了ros answer上面的那篇问答,还有一个就是自己做的另一个实验:创建一个publisher,pub的速度是100Hz,发送缓冲区的大小只有1;创建一个subscriber,调用callback函数的的速度是1Hz(用spinOnce),但接收缓冲区的大小是1000。这样的效果就是,publisher近乎匀速地发送着数据,每秒100次;而subscriber每一秒调用一次callback函数(spinOnce),每次调用都一次性地处理接收缓冲区内的所有数据。由于接收缓冲区大小远大于发送频率,所以接收缓冲区不存在满的情况,所以就能看到subscriber每秒都会很快地处理完100条消息,然后进入休眠,再被唤醒执行callback,再休眠……
而之前用于测试的subscriber,我使用的是spin。这也就意味着,回调函数一直是处于类似于忙等待的状态的,一旦发现接收缓冲区内有数据,即刻取出作运算(前提当然是获得CPU分片时间)。这也就说明了为什么实验得出的结果via topic会更快!但要注意了,忙等待是会占用硬件资源的。在这种简单的实验条件下,via topic固然是很快,但当一个大项目跑起来时,它之前的高性能表现可能要大打折扣。
- Synchronous Service
至于server,在基于RPC请求/回复机制的前提下,它在接收到调用请求前都是处于休眠状态的。Client的call请求将server唤醒,然后server执行请求,再返回结果给client。所以之前在计时的时候,大部分的时间都是消耗在将server从休眠状态唤醒上了!所以才会看起来比via topic慢。
分析到这里,我就在想,那真正的client与server之间通讯的时延,是不是可以利用server返回结果给client这段时间算出呢?这才是真正抛开了将server从休眠唤醒的时间影响,是client与server通讯的真正时延!于是又有了下图:
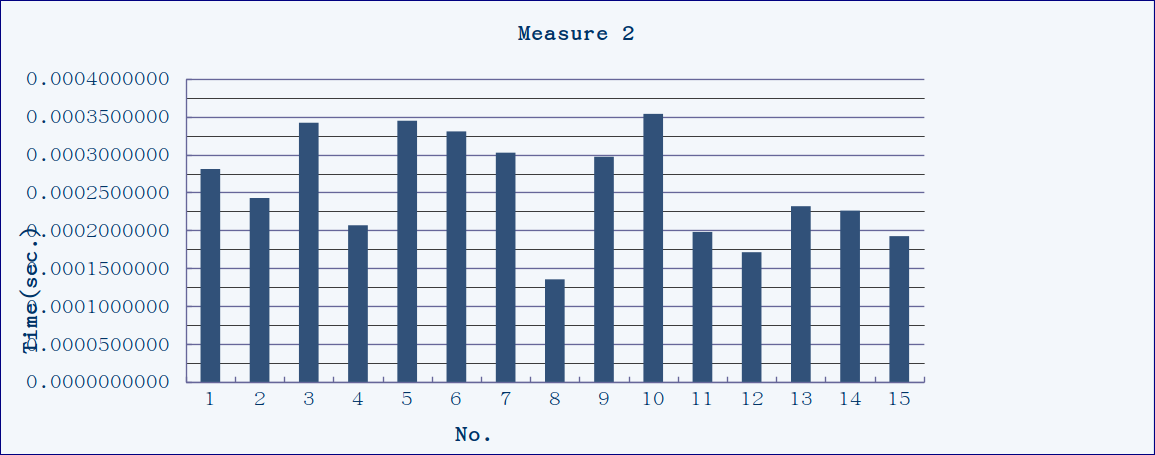
果不其然!表中数据的中位数应该在0.3ms左右,也就是说,从server返回结果到client接收到结果,只需要0.3ms的时间!尽管使用spin通过topic转发数据类似于忙等待(也许ROS的内部机制会对spin的频率作最高限制),但也需要大约0.7ms的时间!而service机制中,client发出call请求之后就会进入阻塞状态,直至server返回结果,期间的时延是via topic的一半而已!
而从这个数据我们还可以估计出将休眠状态的server唤醒,所需要的时间大约是2.7ms。如果计算一来一回,client从发出call请求到接收返回结果,除去请求被执行的时间,在通讯上耗费的时间约是3.3ms,其中将server唤醒的时间约占82%!
- Conclusion
Topic与Service各有优劣。在设计项目的时候,要周全考虑各个方面的因素。Service比较适合用于执行复杂的、调度次数较低的任务。而topic则适合在通讯频率高的情况下使用。再者,使用ros::Rate和sleep合理设置程序的执行速率,能使程序弹性更大,增强可维护性。使用topic时,也别忘了关注一下缓冲区的大小设置。
优劣分析
Service
- 优点:
- Client只需要关注发出命令请求、接收反馈,而无须关注底层实现,系统可维护性高
- Client维护着一个与server的持久连接(persistent connection),在单纯的数据传输上可以做到更快,尤其是在分布式作业时
- 缺点:
- 当server单方改变执行模式或者存在bug的时候,client无法得知具体情况,因为server程序对client而言是透明的。在这种情况下,client只能得到一个错误的数据,或者被告知执行失败,甚至是等待超时
- Server唤醒耗时太大,不建议用于通讯频率高的情况
Topic
- 优点:
- 能非常方便地通过监听topic的方法查看各个node的运行状态等信息,可维护性高
- 能根据实际情况调整发送速率、发送/接收缓冲区大小,使之适应项目需求
- Topic是多对多的,可操作性强;而service只能一对多(一个server应对多个client)
- 缺点:
- 因为是异步架构,回调函数的执行频率设计对系统整体性能影响很大
- 对于使用频率不高的程序,若使用topic进行信息交换,想要减少额外系统开销的办法就是降低回调的速率。但一旦降低回调的速率,同时受到负面影响的还有系统的实时性
【转】ROS之topic和service通信比较的更多相关文章
- ROS(二)Service通信
使用自定义的消息类型,实现service方式的节点间双向通信 在package目录下创建msg和srv目录,存放package需要使用的.msg和.srv文件. 在ROS中,message被设计为一种 ...
- ROS Node/Topic/Message/Service的一些问题
1.Node http://blog.exbot.net/archives/1412 (摘自老王说ros) node干的什么活?callback queue里的活.这个callback queue里的 ...
- ROS学习(七)—— 理解ROS Topic
一.准备工作 1.打开roscore roscore 2.turtlesim 打开一个turtulesim节点 rosrun turtlesim turtlesim_node 3.turtle key ...
- Service通信
1.简介 Service通信是双向的, 它不仅可以发送消息, 同时还会有反馈. 所以service包括两部分, 一部分是请求方( Clinet) , 另一部分是应答方/服务提供方( Server) . ...
- 为应用程序池“XX”提供服务的进程在与 Windows Process Activation Service 通信时出现严重错误
场景 WCF应用程序部署在IIS7中,使用net.tcp协议对外给几百台客户端提供服务,应用程序池不断崩溃重启. 分析过程 在事件查看器中看到的错误信息类似于 为应用程序池“XX”提供服务的进程在与 ...
- 通过AIDL在两个APP之间Service通信
一.项目介绍 [知识准备] ①Android Interface definition language(aidl,android接口定义语言),其目的实现跨进程的调用.进程是程序在os中执行的载体, ...
- [转帖]为应用程序池“XXX”提供服务的进程在与 Windows Process Activation Service 通信时出现严重错误。该进程 ID 为“XXXX”。数据字段包含错误号。
[终极解决方案]为应用程序池“XXX”提供服务的进程在与 Windows Process Activation Service 通信时出现严重错误.该进程 ID 为“XXXX”.数据字段包含错误号. ...
- IIS 为应用程序池提供服务的进程在与 Windows Process Activation Service 通信时出现严重错误的解决方法
系统环境:Windows Server 2008 R2 64位, IIS 7.0 错误信息: 为应用程序池提供服务的进程在与 Windows Process Activation Service 通信 ...
- Activity与Service通信
Activity与Service通信的方式有三种: 继承Binder类 这个方式只有当你的Acitivity和Service处于同一个Application和进程时,才可以用,比如你后台有一个播放背景 ...
随机推荐
- ESRI,空间数据处理,WKT,GeoJson
ESRI,空间数据处理,WKT,GeoJson 一.WKT 二.GeoJson 三.WKT转GeoJson 四.GeoJson 转 WKT 一.WKT WKT(well-known text)是一种文 ...
- Calendar 日期判断 等于 。小于。大于
public static void main(String[] args) throws Exception { String startTime = "2012-12-12 12:45: ...
- 1. Centos 7重置root密码
1.开机启动系统,不断按"↑"和"↓",在如下引导界面按"e",编辑引导项 2.按"↓"找到下图显示的代码 删除代码最后 ...
- shell脚本的使用该熟练起来了,你说呢?(篇四)
继续前一篇的文章: shell脚本的使用该熟练起来了,你说呢?(篇一) shell脚本的使用该熟练起来了,你说呢?(篇二) shell脚本的使用该熟练起来了,你说呢?(篇三) 文章里面测试的命令脚本文 ...
- 克鲁斯卡尔算法(Kruskal算法)求最小生成树
题目传送:https://loj.ac/p/10065 1.排序函数sort,任何一种排序算法都行,下面的示例代码中,我采用的是冒泡排序算法 2.寻源函数getRoot,寻找某一个点在并查集中的根,注 ...
- c文件二进制读取写入文件、c语言实现二进制(01)转化成txt格式文本、c读取文件名可变
c语言实现二进制(01)转化成txt格式文本: 下面的程序只能实现ascall对应字符转换,如果文件内出现中文字符,则会出现错误. 本程序要自己创建个文本格式的输入文件a1.txt,编译后能将文本文件 ...
- js面向对象封装级联下拉菜单列表
本实例开发的级联下拉菜单是根据已有json数据创建的DOM元素.点击文本框后,显示一级菜单.如果菜单中包含子菜单,菜单右侧会有指示箭头.点击菜单之后,会再显示下一级菜单,以此类推.当菜单下无子菜单时, ...
- Nginx 动静分离概述
目录 Nginx 动静分离是什么 Nginx 动静分离配置 Nginx 动静分离是什么 Nginx 动静分离,指的是静态资源请求由 Nginx 处理,动态资源请求由 php-fpm 处理或 tomca ...
- codeforces 1045I Palindrome Pairs 【stl+构造】
题目:戳这里 题意:给1e5个字符串,问有多少对字符串组合,满足最多只有一种字符有奇数个. 解题思路:每种情况用map存一下就行了.感觉这题自己的代码思路比较清晰,所以写个题解记录一下 附ac代码: ...
- KafkaBroker 简析
Kafka 依赖 Zookeeper 来维护集群成员的信息: Kafka 使用 Zookeeper 的临时节点来选举 controller Zookeeper 在 broker 加入集群或退出集群时通 ...