Openwrt Image Builder/SDK 初探
image builder和SDK既可以从官网上下载,又可以自己进行编译(make menuconfig)。
官网上下载的是预先帮你编译好的,这样可以大量节省自己编译源码花的时间,
这两个东西相当于半成品,最后的东西还是要你自己生成的。
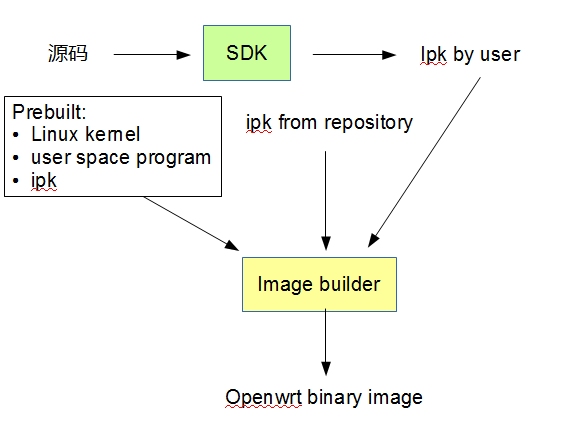
开发流程如下:
在编译时将image builder和sdk这两项勾上之后,它们就可以被编译出来的。
当然也可以从官网下载,不过官网编译出来的包只支持X64
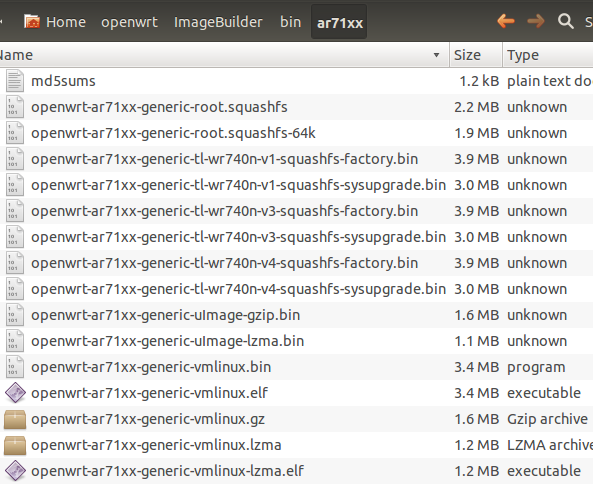
最下面两个就是Image builder和SDK。
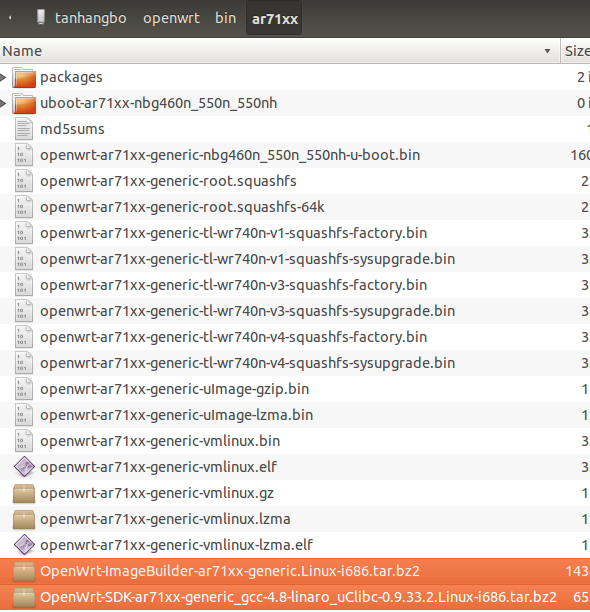
然后将它们分别解压,名字太长了,改的短一点:

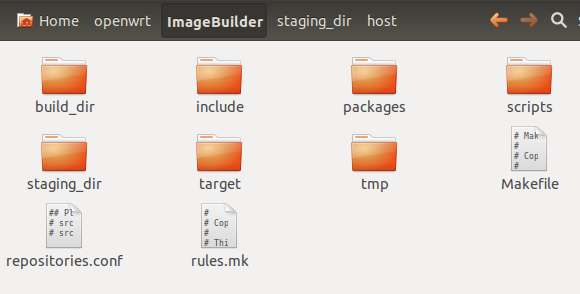
这里的目录和Openwrt源码包是差不多的,不过Image builder只有打包功能,所以
不需要toolchain,只需要打包的一些工具和预编译好的一些二进制文件。
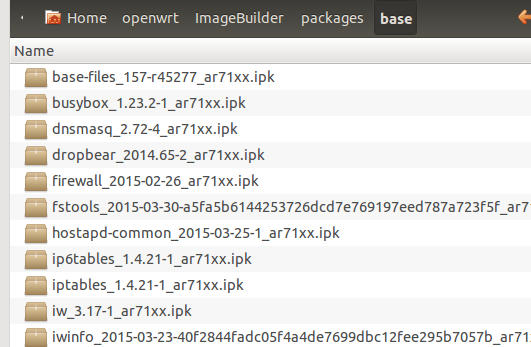
这里的packages目录和Openwrt源码不一样,这里是预先编译好的ipk,
而openwrt里面的packages目录是用来存放ipk包的一些Makefile和patch。
开始打包,首先,用make info来查看当前已经有的profile,也就是预定义的型号信息:
make info > info.txt
这里会输出很多行,这里选择一些自己感兴趣的行:
Current Target: "ar71xx (Generic)"
Default Packages: base-files libc libgcc busybox dropbear mtd uci opkg netifd fstools kmod-gpio-button-hotplug swconfig kmod-ath9k wpad-mini uboot-envtools dnsmasq iptables ip6tables ppp ppp-mod-pppoe kmod-nf-nathelper firewall odhcpd odhcp6c
Available Profiles: Default:
Default Profile (all drivers)
Packages: kmod-usb-core kmod-usb-ohci kmod-usb2 kmod-ledtrig-usbdev
Minimal:
Minimal Profile (no drivers)
Packages: -kmod-ath9k -wpad-mini
ath5k:
Atheros .11abg WiFi (ath5k)
Packages: kmod-ath5k -kmod-ath9k
CARAMBOLA2:
Carambola2 board from 8Devices
Packages: kmod-usb-core kmod-usb2
ALFAAP96:
ALFA Network AP96 board
Packages: kmod-usb-core kmod-usb-ohci kmod-usb2 kmod-rtc-pcf2123
HORNETUB:
ALFA Network Hornet-UB board (8MB flash, 32MB ram)
Packages: kmod-usb-core kmod-usb2 kmod-ledtrig-usbdev
HORNETUBx2:
ALFA Network Hornet-UB-x2 board (16MB flash, 64MB ram)
Packages: kmod-usb-core kmod-usb2 kmod-ledtrig-usbdev
ALFANX:
ALFA Network N2/N5 board
Packages:
TLWA901:
TP-LINK TL-WA901N/ND
Packages:
TLWDR4300:
TP-LINK TL-WDR3500////MW4350R
Packages: kmod-usb-core kmod-usb2 kmod-ledtrig-usbdev
TLWDR4900V2:
TP-LINK TL-WDR4900v2
Packages: kmod-usb-core kmod-usb2 kmod-ledtrig-usbdev
TLWR740:
TP-LINK TL-WR740N/ND
Packages:
TLWR741:
TP-LINK TL-WR741N/ND
Packages:
TLWR743:
TP-LINK TL-WR743N/ND
Packages:
TLWR841:
TP-LINK TL-WR841N/ND
Packages:
这些列表应该是从根目录下面的.targetinfo提取的(文件管理器会把它隐藏)
其中Default Packages是默认会编译进二进制文件的ipk。然后下面每一个型号对应的
Packages是自己要增加的package
可以看到里面有TLWR740,那么开始编译:
make image PROFILE="TLWR740"
可以看到生成了一个bin文件夹。
准备开始刷机,刷机之前的系统(水星MW150R):
刷机之后:
原来是没有安装luci。
telnet成功,进一步说明了已经刷好了,但是缺少luci。

这里已经为我们准备好了luci:
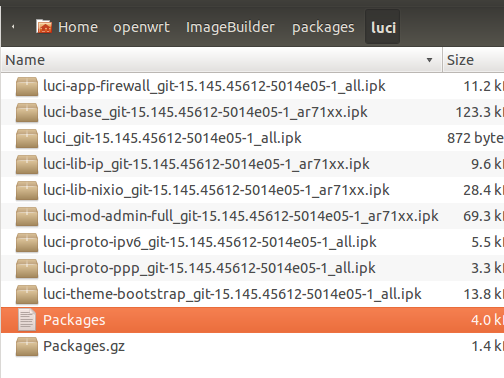
那么将这些东西编译进去吧:
make image PROFILE="TLWR740" PACKAGES="luci-app-firewall luci-base luci-lib-ip luci-lib-nixio luci-mod-admin-full luci-proto-ppp luci-theme-bootstrap luci"
现在编译出来的bin从2.87MB涨到3.3MB了:

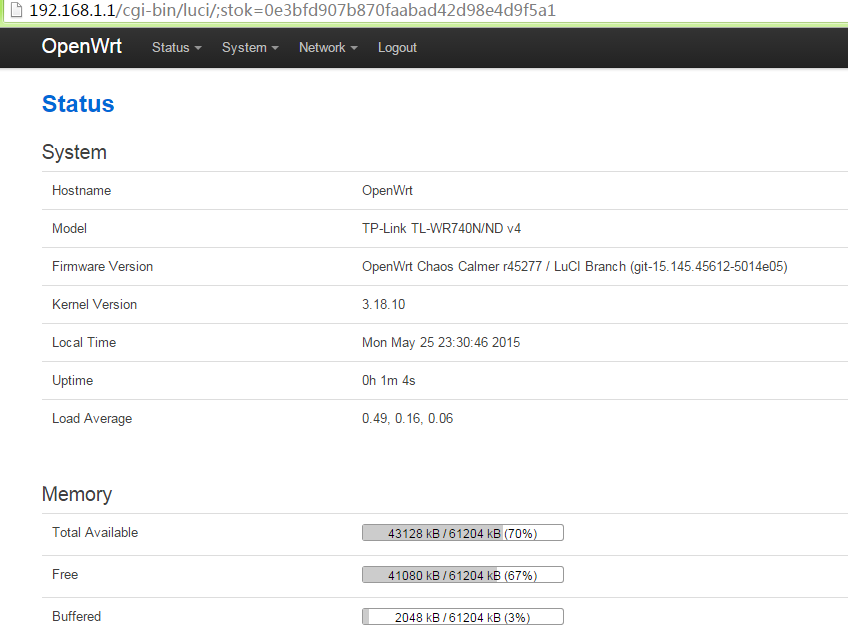
刷完之后luci出现了:
接下来用SDK做一个helloworld:
参考资料:http://jphome.github.io/blog/2014/03/29/openwrt_sdk.html
新建好相应的文件和目录之后,使用make V=99来生成:
最后得到一个ipk文件

把它编译进去:
make image PROFILE="TLWR740" PACKAGES="luci-app-firewall luci-base luci-lib-ip luci-lib-nixio luci-mod-admin-full luci-proto-ppp luci-theme-bootstrap luci helloworld"
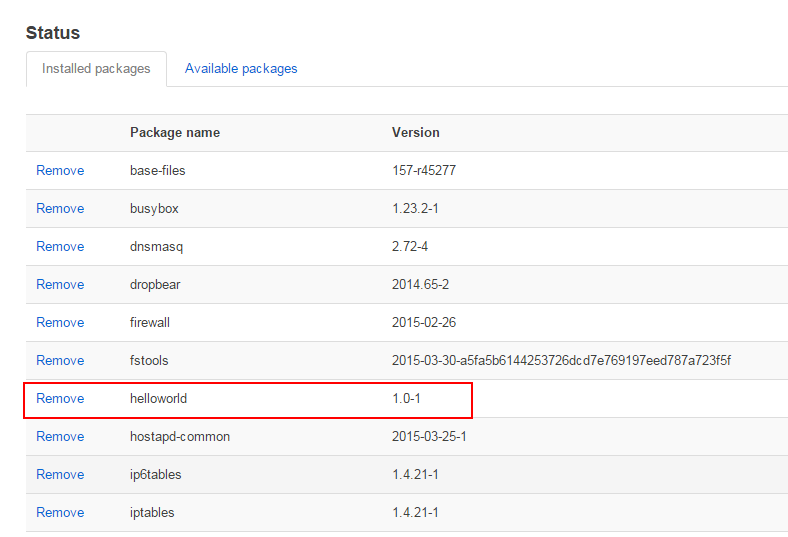
刷完固件之后发现它已经在里面了。
然后执行helloword(可能telnet出问题了,h没有显示出来)
参考资料:
https://cokebar.info/archives/90
http://demon.tw/hardware/image-generator-image-builder-openwrt.html
http://blog.berry10086.com/Tech/Openwrt/tips-about-customize-openwrt/
http://www.it165.net/network/html/201303/1004.html
Openwrt Image Builder/SDK 初探的更多相关文章
- Builder 模式初探
Builder 模式是一步一步创建一个复杂对象的创建型模式,它允许用户在不知道内部构建细节的情况下,可以更精细的控制对象的构造流程.该模式是为了将构建复杂对象的过程和它的部件解耦,使得构建过程和部件的 ...
- Microsoft Bot Builder Overview
微软机器人构建器概述 微软机器人Builder是一个强大的框架构建机器人可以处理自由交互和更多的引导,这种可能性是显式地显示给用户. 它很容易使用和利用c#写机器人提供一个自然的方式. 高级功能: 强 ...
- openwrt 上的 upnp wifi 音频推送 gmediarender
首先是必须启用的模块 Libraries ---> <*> libupnp Sound ---> <*> alsa-utils<*> madplay-a ...
- Openwrt:基于MT7628/MT7688的PWM驱动
前言 MT7628/MT7688的PWM驱动相关资料较少,官方的datasheet基本也是一堆寄存器,啃了许久,终于嚼出了味道.由于PWM存在IO口复用的问题,所以要提前配置好GPIO的工作方式,不然 ...
- menuconfig选项
打开一个典型的openwrt中package目录下都能发现两个相同点: ? package/<name> /Makefile ? package/<name> /patches ...
- 错误异常 (1)Android Studio错误提示:Gradle project sync failed. Basic functionality (eg. editing, debugging) will not work properly
[已解决]Android Studio错误提示:Gradle project sync failed. Basic functionality (eg. editing, debugging) wil ...
- 第三篇:gradle 编译 Android app 概览
引言:经过上两篇的论述,我们已经从代码到架构都简单的熟悉了一遍,理论上,只要知道android app的编译过程,我们大可以自己写一份用gradle编译app的插件,插件内将将整个流程用Task的依赖 ...
- Office 365 机器人(Bot)开发入门
作者:陈希章 发表于 2017年7月29日 前言 作为人工智能技术的一个主要的表现形式,这些年机器人(bot)的应用越来越广泛.不管是有实物的,还是纯软件的,现在的机器人技术应该说已经走入寻常百姓家了 ...
- Bot Framework 搭建聊天机器人
这周我来跟大家分享的是在Microsoft Build 2016上发布的微软聊天机器人的框架. 现如今,各种人工智能充斥在我们的生活里.最典型的人工智能产品就是聊天机器人,它既可以陪我们聊天,也可以替 ...
随机推荐
- ORACLE数据库异步IO介绍
异步IO概念 Linux 异步 I/O (AIO)是 Linux 内核中提供的一个增强的功能.它是Linux 2.6 版本内核的一个标准特性,当然我们在2.4 版本内核的补丁中也可以找到它.AIO 背 ...
- RabbitMQ入门教程——安装及配置
RabbitMQ是一个消息代理,一个消息系统的媒介,提供了一个通用的消息发送及接收平台,并且能够保障消息传输过程中的安全.使用erlang语言开发,开源,在易用性.扩展性.高可用性等方面表现不俗 技术 ...
- PHP MSSQL 分页实例(刷新)
<?php/* '页面说明:*/ $link=mssql_connect("MYSQL2005","sa","123456") or ...
- 学习myBatis - 如何配置myBatis
这篇文章主要学习如何配置myBatis. 要学习新东西要讲究方法,要从三个层面去理解它:它是什么(what),为什么要学它(why),怎么用它(how).有了学习方法学习的效率才高. 1.myBati ...
- android Timer使用方法
Timer属性:http://www.apihome.cn/api/java/Timer.html 声明创建: private Timer mTimer; protected void onCreat ...
- proteus 查找 仿真元件 中英文对照 [持续更新]
CRYSTAL 晶振 CAP 电容 RES 电阻 LED 灯 DIODE 二极管 POWER 电源 GND 接地 SPEAKER 扬声器 AT89C51 51 CPU芯片 三极管 PNP N ...
- 【HTML5】嵌入另一张HTML文档、通过插件嵌入内容、嵌入数字表现形式
1.嵌入另一张HTML文档 iframe 元素允许在现有的HTML文档中嵌入另一张文档.下面代码展示了iframe元素的用法: <!DOCTYPE html> <html lang= ...
- POJ 2826 An Easy Problem?! --计算几何,叉积
题意: 在墙上钉两块木板,问能装多少水.即两条线段所夹的中间开口向上的面积(到短板的水平线截止) 解法: 如图: 先看是否相交,不相交肯定不行,然后就要求出P与A,B / C,D中谁形成的向量是指向上 ...
- 洛谷P1538迎春舞会之数字舞蹈
题目背景 HNSDFZ的同学们为了庆祝春节,准备排练一场舞会. 题目描述 在越来越讲究合作的时代,人们注意的更多的不是个人物的舞姿,而是集体的排列. 为了配合每年的倒计时,同学们决定排出——“数字舞蹈 ...
- [tem]高精度2
从1开始 ; ; struct big{ int size,d[L]; big():size(a){memset(d,,sizeof(int)*L);} }; void jia(big &a, ...