深度学习面试题26:GoogLeNet(Inception V2)
目录
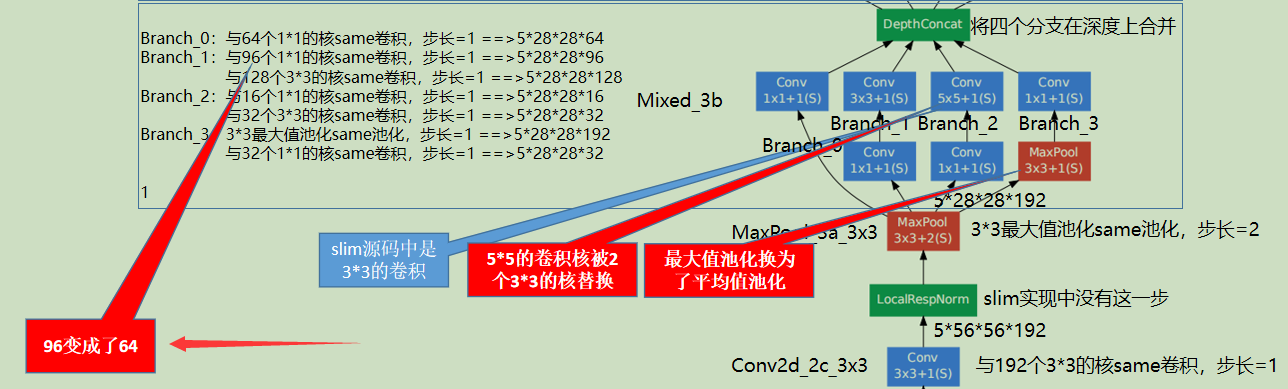
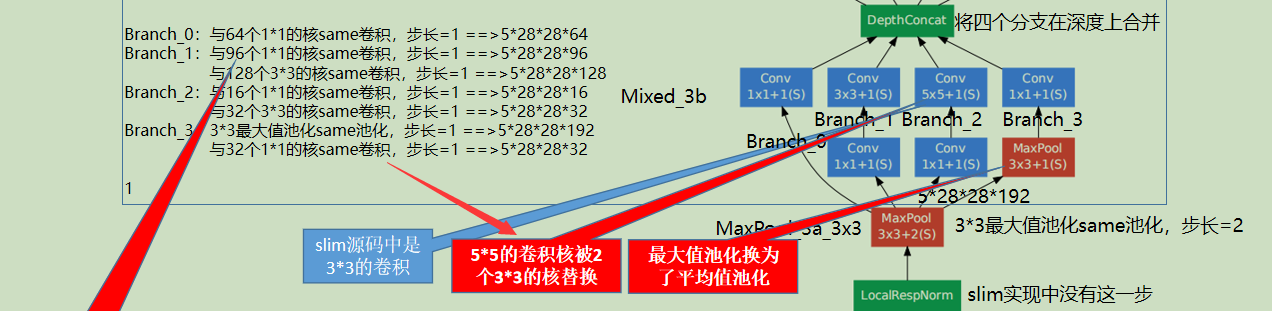
第一层卷积换为分离卷积
一些层的卷积核的个数发生了变化
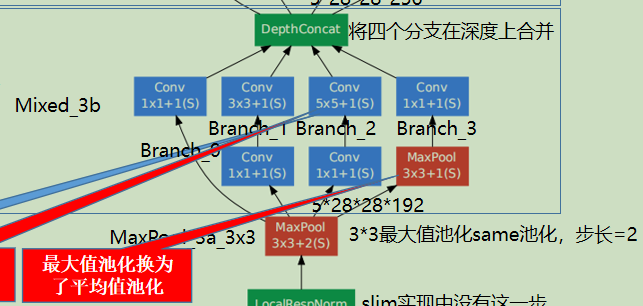
多个小卷积核代替大卷积核
一些最大值池化换为了平均值池化
完整代码
参考资料
|
第一层卷积换为分离卷积 |

net = slim.separable_conv2d(
inputs,
depth(64), [7, 7],
depth_multiplier=depthwise_multiplier,
stride=2,
padding='SAME',
weights_initializer=trunc_normal(1.0),
scope=end_point)
|
一些层的卷积核的个数发生了变化 |
|
多个小卷积核代替大卷积核 |
|
一些最大值池化换为了平均值池化 |
branch_3 = slim.avg_pool2d(net, [3, 3], scope='AvgPool_0a_3x3')
|
完整代码 |
# Copyright 2016 The TensorFlow Authors. All Rights Reserved.
#
# Licensed under the Apache License, Version 2.0 (the "License");
# you may not use this file except in compliance with the License.
# You may obtain a copy of the License at
#
# http://www.apache.org/licenses/LICENSE-2.0
#
# Unless required by applicable law or agreed to in writing, software
# distributed under the License is distributed on an "AS IS" BASIS,
# WITHOUT WARRANTIES OR CONDITIONS OF ANY KIND, either express or implied.
# See the License for the specific language governing permissions and
# limitations under the License.
# ==============================================================================
"""Contains the definition for inception v2 classification network.""" from __future__ import absolute_import
from __future__ import division
from __future__ import print_function import tensorflow as tf from nets import inception_utils slim = tf.contrib.slim
trunc_normal = lambda stddev: tf.truncated_normal_initializer(0.0, stddev) def inception_v2_base(inputs,
final_endpoint='Mixed_5c',
min_depth=16,
depth_multiplier=1.0,
use_separable_conv=True,
data_format='NHWC',
include_root_block=True,
scope=None):
"""Inception v2 (6a2). Constructs an Inception v2 network from inputs to the given final endpoint.
This method can construct the network up to the layer inception(5b) as
described in http://arxiv.org/abs/1502.03167. Args:
inputs: a tensor of shape [batch_size, height, width, channels].
final_endpoint: specifies the endpoint to construct the network up to. It
can be one of ['Conv2d_1a_7x7', 'MaxPool_2a_3x3', 'Conv2d_2b_1x1',
'Conv2d_2c_3x3', 'MaxPool_3a_3x3', 'Mixed_3b', 'Mixed_3c', 'Mixed_4a',
'Mixed_4b', 'Mixed_4c', 'Mixed_4d', 'Mixed_4e', 'Mixed_5a', 'Mixed_5b',
'Mixed_5c']. If include_root_block is False, ['Conv2d_1a_7x7',
'MaxPool_2a_3x3', 'Conv2d_2b_1x1', 'Conv2d_2c_3x3', 'MaxPool_3a_3x3'] will
not be available.
min_depth: Minimum depth value (number of channels) for all convolution ops.
Enforced when depth_multiplier < 1, and not an active constraint when
depth_multiplier >= 1.
depth_multiplier: Float multiplier for the depth (number of channels)
for all convolution ops. The value must be greater than zero. Typical
usage will be to set this value in (0, 1) to reduce the number of
parameters or computation cost of the model.
use_separable_conv: Use a separable convolution for the first layer
Conv2d_1a_7x7. If this is False, use a normal convolution instead.
data_format: Data format of the activations ('NHWC' or 'NCHW').
include_root_block: If True, include the convolution and max-pooling layers
before the inception modules. If False, excludes those layers.
scope: Optional variable_scope. Returns:
tensor_out: output tensor corresponding to the final_endpoint.
end_points: a set of activations for external use, for example summaries or
losses. Raises:
ValueError: if final_endpoint is not set to one of the predefined values,
or depth_multiplier <= 0
""" # end_points will collect relevant activations for external use, for example
# summaries or losses.
end_points = {} # Used to find thinned depths for each layer.
if depth_multiplier <= 0:
raise ValueError('depth_multiplier is not greater than zero.')
depth = lambda d: max(int(d * depth_multiplier), min_depth) if data_format != 'NHWC' and data_format != 'NCHW':
raise ValueError('data_format must be either NHWC or NCHW.')
if data_format == 'NCHW' and use_separable_conv:
raise ValueError(
'separable convolution only supports NHWC layout. NCHW data format can'
' only be used when use_separable_conv is False.'
) concat_dim = 3 if data_format == 'NHWC' else 1
with tf.variable_scope(scope, 'InceptionV2', [inputs]):
with slim.arg_scope(
[slim.conv2d, slim.max_pool2d, slim.avg_pool2d],
stride=1,
padding='SAME',
data_format=data_format): net = inputs
if include_root_block:
# Note that sizes in the comments below assume an input spatial size of
# 224x224, however, the inputs can be of any size greater 32x32. # 224 x 224 x 3
end_point = 'Conv2d_1a_7x7' if use_separable_conv:
# depthwise_multiplier here is different from depth_multiplier.
# depthwise_multiplier determines the output channels of the initial
# depthwise conv (see docs for tf.nn.separable_conv2d), while
# depth_multiplier controls the # channels of the subsequent 1x1
# convolution. Must have
# in_channels * depthwise_multipler <= out_channels
# so that the separable convolution is not overparameterized.
depthwise_multiplier = min(int(depth(64) / 3), 8)
net = slim.separable_conv2d(
inputs,
depth(64), [7, 7],
depth_multiplier=depthwise_multiplier,
stride=2,
padding='SAME',
weights_initializer=trunc_normal(1.0),
scope=end_point)
else:
# Use a normal convolution instead of a separable convolution.
net = slim.conv2d(
inputs,
depth(64), [7, 7],
stride=2,
weights_initializer=trunc_normal(1.0),
scope=end_point)
end_points[end_point] = net
if end_point == final_endpoint:
return net, end_points
# 112 x 112 x 64
end_point = 'MaxPool_2a_3x3'
net = slim.max_pool2d(net, [3, 3], scope=end_point, stride=2)
end_points[end_point] = net
if end_point == final_endpoint:
return net, end_points
# 56 x 56 x 64
end_point = 'Conv2d_2b_1x1'
net = slim.conv2d(
net,
depth(64), [1, 1],
scope=end_point,
weights_initializer=trunc_normal(0.1))
end_points[end_point] = net
if end_point == final_endpoint:
return net, end_points
# 56 x 56 x 64
end_point = 'Conv2d_2c_3x3'
net = slim.conv2d(net, depth(192), [3, 3], scope=end_point)
end_points[end_point] = net
if end_point == final_endpoint:
return net, end_points
# 56 x 56 x 192
end_point = 'MaxPool_3a_3x3'
net = slim.max_pool2d(net, [3, 3], scope=end_point, stride=2)
end_points[end_point] = net
if end_point == final_endpoint:
return net, end_points # 28 x 28 x 192
# Inception module.
end_point = 'Mixed_3b'
with tf.variable_scope(end_point):
with tf.variable_scope('Branch_0'):
branch_0 = slim.conv2d(net, depth(64), [1, 1], scope='Conv2d_0a_1x1')
with tf.variable_scope('Branch_1'):
branch_1 = slim.conv2d(
net, depth(64), [1, 1],
weights_initializer=trunc_normal(0.09),
scope='Conv2d_0a_1x1')
branch_1 = slim.conv2d(branch_1, depth(64), [3, 3],
scope='Conv2d_0b_3x3')
with tf.variable_scope('Branch_2'):
branch_2 = slim.conv2d(
net, depth(64), [1, 1],
weights_initializer=trunc_normal(0.09),
scope='Conv2d_0a_1x1')
branch_2 = slim.conv2d(branch_2, depth(96), [3, 3],
scope='Conv2d_0b_3x3')
branch_2 = slim.conv2d(branch_2, depth(96), [3, 3],
scope='Conv2d_0c_3x3')
with tf.variable_scope('Branch_3'):
branch_3 = slim.avg_pool2d(net, [3, 3], scope='AvgPool_0a_3x3')
branch_3 = slim.conv2d(
branch_3, depth(32), [1, 1],
weights_initializer=trunc_normal(0.1),
scope='Conv2d_0b_1x1')
net = tf.concat(
axis=concat_dim, values=[branch_0, branch_1, branch_2, branch_3])
end_points[end_point] = net
if end_point == final_endpoint: return net, end_points
# 28 x 28 x 256
end_point = 'Mixed_3c'
with tf.variable_scope(end_point):
with tf.variable_scope('Branch_0'):
branch_0 = slim.conv2d(net, depth(64), [1, 1], scope='Conv2d_0a_1x1')
with tf.variable_scope('Branch_1'):
branch_1 = slim.conv2d(
net, depth(64), [1, 1],
weights_initializer=trunc_normal(0.09),
scope='Conv2d_0a_1x1')
branch_1 = slim.conv2d(branch_1, depth(96), [3, 3],
scope='Conv2d_0b_3x3')
with tf.variable_scope('Branch_2'):
branch_2 = slim.conv2d(
net, depth(64), [1, 1],
weights_initializer=trunc_normal(0.09),
scope='Conv2d_0a_1x1')
branch_2 = slim.conv2d(branch_2, depth(96), [3, 3],
scope='Conv2d_0b_3x3')
branch_2 = slim.conv2d(branch_2, depth(96), [3, 3],
scope='Conv2d_0c_3x3')
with tf.variable_scope('Branch_3'):
branch_3 = slim.avg_pool2d(net, [3, 3], scope='AvgPool_0a_3x3')
branch_3 = slim.conv2d(
branch_3, depth(64), [1, 1],
weights_initializer=trunc_normal(0.1),
scope='Conv2d_0b_1x1')
net = tf.concat(
axis=concat_dim, values=[branch_0, branch_1, branch_2, branch_3])
end_points[end_point] = net
if end_point == final_endpoint: return net, end_points
# 28 x 28 x 320
end_point = 'Mixed_4a'
with tf.variable_scope(end_point):
with tf.variable_scope('Branch_0'):
branch_0 = slim.conv2d(
net, depth(128), [1, 1],
weights_initializer=trunc_normal(0.09),
scope='Conv2d_0a_1x1')
branch_0 = slim.conv2d(branch_0, depth(160), [3, 3], stride=2,
scope='Conv2d_1a_3x3')
with tf.variable_scope('Branch_1'):
branch_1 = slim.conv2d(
net, depth(64), [1, 1],
weights_initializer=trunc_normal(0.09),
scope='Conv2d_0a_1x1')
branch_1 = slim.conv2d(
branch_1, depth(96), [3, 3], scope='Conv2d_0b_3x3')
branch_1 = slim.conv2d(
branch_1, depth(96), [3, 3], stride=2, scope='Conv2d_1a_3x3')
with tf.variable_scope('Branch_2'):
branch_2 = slim.max_pool2d(
net, [3, 3], stride=2, scope='MaxPool_1a_3x3')
net = tf.concat(axis=concat_dim, values=[branch_0, branch_1, branch_2])
end_points[end_point] = net
if end_point == final_endpoint: return net, end_points
# 14 x 14 x 576
end_point = 'Mixed_4b'
with tf.variable_scope(end_point):
with tf.variable_scope('Branch_0'):
branch_0 = slim.conv2d(net, depth(224), [1, 1], scope='Conv2d_0a_1x1')
with tf.variable_scope('Branch_1'):
branch_1 = slim.conv2d(
net, depth(64), [1, 1],
weights_initializer=trunc_normal(0.09),
scope='Conv2d_0a_1x1')
branch_1 = slim.conv2d(
branch_1, depth(96), [3, 3], scope='Conv2d_0b_3x3')
with tf.variable_scope('Branch_2'):
branch_2 = slim.conv2d(
net, depth(96), [1, 1],
weights_initializer=trunc_normal(0.09),
scope='Conv2d_0a_1x1')
branch_2 = slim.conv2d(branch_2, depth(128), [3, 3],
scope='Conv2d_0b_3x3')
branch_2 = slim.conv2d(branch_2, depth(128), [3, 3],
scope='Conv2d_0c_3x3')
with tf.variable_scope('Branch_3'):
branch_3 = slim.avg_pool2d(net, [3, 3], scope='AvgPool_0a_3x3')
branch_3 = slim.conv2d(
branch_3, depth(128), [1, 1],
weights_initializer=trunc_normal(0.1),
scope='Conv2d_0b_1x1')
net = tf.concat(
axis=concat_dim, values=[branch_0, branch_1, branch_2, branch_3])
end_points[end_point] = net
if end_point == final_endpoint: return net, end_points
# 14 x 14 x 576
end_point = 'Mixed_4c'
with tf.variable_scope(end_point):
with tf.variable_scope('Branch_0'):
branch_0 = slim.conv2d(net, depth(192), [1, 1], scope='Conv2d_0a_1x1')
with tf.variable_scope('Branch_1'):
branch_1 = slim.conv2d(
net, depth(96), [1, 1],
weights_initializer=trunc_normal(0.09),
scope='Conv2d_0a_1x1')
branch_1 = slim.conv2d(branch_1, depth(128), [3, 3],
scope='Conv2d_0b_3x3')
with tf.variable_scope('Branch_2'):
branch_2 = slim.conv2d(
net, depth(96), [1, 1],
weights_initializer=trunc_normal(0.09),
scope='Conv2d_0a_1x1')
branch_2 = slim.conv2d(branch_2, depth(128), [3, 3],
scope='Conv2d_0b_3x3')
branch_2 = slim.conv2d(branch_2, depth(128), [3, 3],
scope='Conv2d_0c_3x3')
with tf.variable_scope('Branch_3'):
branch_3 = slim.avg_pool2d(net, [3, 3], scope='AvgPool_0a_3x3')
branch_3 = slim.conv2d(
branch_3, depth(128), [1, 1],
weights_initializer=trunc_normal(0.1),
scope='Conv2d_0b_1x1')
net = tf.concat(
axis=concat_dim, values=[branch_0, branch_1, branch_2, branch_3])
end_points[end_point] = net
if end_point == final_endpoint: return net, end_points
# 14 x 14 x 576
end_point = 'Mixed_4d'
with tf.variable_scope(end_point):
with tf.variable_scope('Branch_0'):
branch_0 = slim.conv2d(net, depth(160), [1, 1], scope='Conv2d_0a_1x1')
with tf.variable_scope('Branch_1'):
branch_1 = slim.conv2d(
net, depth(128), [1, 1],
weights_initializer=trunc_normal(0.09),
scope='Conv2d_0a_1x1')
branch_1 = slim.conv2d(branch_1, depth(160), [3, 3],
scope='Conv2d_0b_3x3')
with tf.variable_scope('Branch_2'):
branch_2 = slim.conv2d(
net, depth(128), [1, 1],
weights_initializer=trunc_normal(0.09),
scope='Conv2d_0a_1x1')
branch_2 = slim.conv2d(branch_2, depth(160), [3, 3],
scope='Conv2d_0b_3x3')
branch_2 = slim.conv2d(branch_2, depth(160), [3, 3],
scope='Conv2d_0c_3x3')
with tf.variable_scope('Branch_3'):
branch_3 = slim.avg_pool2d(net, [3, 3], scope='AvgPool_0a_3x3')
branch_3 = slim.conv2d(
branch_3, depth(96), [1, 1],
weights_initializer=trunc_normal(0.1),
scope='Conv2d_0b_1x1')
net = tf.concat(
axis=concat_dim, values=[branch_0, branch_1, branch_2, branch_3])
end_points[end_point] = net
if end_point == final_endpoint: return net, end_points
# 14 x 14 x 576
end_point = 'Mixed_4e'
with tf.variable_scope(end_point):
with tf.variable_scope('Branch_0'):
branch_0 = slim.conv2d(net, depth(96), [1, 1], scope='Conv2d_0a_1x1')
with tf.variable_scope('Branch_1'):
branch_1 = slim.conv2d(
net, depth(128), [1, 1],
weights_initializer=trunc_normal(0.09),
scope='Conv2d_0a_1x1')
branch_1 = slim.conv2d(branch_1, depth(192), [3, 3],
scope='Conv2d_0b_3x3')
with tf.variable_scope('Branch_2'):
branch_2 = slim.conv2d(
net, depth(160), [1, 1],
weights_initializer=trunc_normal(0.09),
scope='Conv2d_0a_1x1')
branch_2 = slim.conv2d(branch_2, depth(192), [3, 3],
scope='Conv2d_0b_3x3')
branch_2 = slim.conv2d(branch_2, depth(192), [3, 3],
scope='Conv2d_0c_3x3')
with tf.variable_scope('Branch_3'):
branch_3 = slim.avg_pool2d(net, [3, 3], scope='AvgPool_0a_3x3')
branch_3 = slim.conv2d(
branch_3, depth(96), [1, 1],
weights_initializer=trunc_normal(0.1),
scope='Conv2d_0b_1x1')
net = tf.concat(
axis=concat_dim, values=[branch_0, branch_1, branch_2, branch_3])
end_points[end_point] = net
if end_point == final_endpoint: return net, end_points
# 14 x 14 x 576
end_point = 'Mixed_5a'
with tf.variable_scope(end_point):
with tf.variable_scope('Branch_0'):
branch_0 = slim.conv2d(
net, depth(128), [1, 1],
weights_initializer=trunc_normal(0.09),
scope='Conv2d_0a_1x1')
branch_0 = slim.conv2d(branch_0, depth(192), [3, 3], stride=2,
scope='Conv2d_1a_3x3')
with tf.variable_scope('Branch_1'):
branch_1 = slim.conv2d(
net, depth(192), [1, 1],
weights_initializer=trunc_normal(0.09),
scope='Conv2d_0a_1x1')
branch_1 = slim.conv2d(branch_1, depth(256), [3, 3],
scope='Conv2d_0b_3x3')
branch_1 = slim.conv2d(branch_1, depth(256), [3, 3], stride=2,
scope='Conv2d_1a_3x3')
with tf.variable_scope('Branch_2'):
branch_2 = slim.max_pool2d(net, [3, 3], stride=2,
scope='MaxPool_1a_3x3')
net = tf.concat(
axis=concat_dim, values=[branch_0, branch_1, branch_2])
end_points[end_point] = net
if end_point == final_endpoint: return net, end_points
# 7 x 7 x 1024
end_point = 'Mixed_5b'
with tf.variable_scope(end_point):
with tf.variable_scope('Branch_0'):
branch_0 = slim.conv2d(net, depth(352), [1, 1], scope='Conv2d_0a_1x1')
with tf.variable_scope('Branch_1'):
branch_1 = slim.conv2d(
net, depth(192), [1, 1],
weights_initializer=trunc_normal(0.09),
scope='Conv2d_0a_1x1')
branch_1 = slim.conv2d(branch_1, depth(320), [3, 3],
scope='Conv2d_0b_3x3')
with tf.variable_scope('Branch_2'):
branch_2 = slim.conv2d(
net, depth(160), [1, 1],
weights_initializer=trunc_normal(0.09),
scope='Conv2d_0a_1x1')
branch_2 = slim.conv2d(branch_2, depth(224), [3, 3],
scope='Conv2d_0b_3x3')
branch_2 = slim.conv2d(branch_2, depth(224), [3, 3],
scope='Conv2d_0c_3x3')
with tf.variable_scope('Branch_3'):
branch_3 = slim.avg_pool2d(net, [3, 3], scope='AvgPool_0a_3x3')
branch_3 = slim.conv2d(
branch_3, depth(128), [1, 1],
weights_initializer=trunc_normal(0.1),
scope='Conv2d_0b_1x1')
net = tf.concat(
axis=concat_dim, values=[branch_0, branch_1, branch_2, branch_3])
end_points[end_point] = net
if end_point == final_endpoint: return net, end_points
# 7 x 7 x 1024
end_point = 'Mixed_5c'
with tf.variable_scope(end_point):
with tf.variable_scope('Branch_0'):
branch_0 = slim.conv2d(net, depth(352), [1, 1], scope='Conv2d_0a_1x1')
with tf.variable_scope('Branch_1'):
branch_1 = slim.conv2d(
net, depth(192), [1, 1],
weights_initializer=trunc_normal(0.09),
scope='Conv2d_0a_1x1')
branch_1 = slim.conv2d(branch_1, depth(320), [3, 3],
scope='Conv2d_0b_3x3')
with tf.variable_scope('Branch_2'):
branch_2 = slim.conv2d(
net, depth(192), [1, 1],
weights_initializer=trunc_normal(0.09),
scope='Conv2d_0a_1x1')
branch_2 = slim.conv2d(branch_2, depth(224), [3, 3],
scope='Conv2d_0b_3x3')
branch_2 = slim.conv2d(branch_2, depth(224), [3, 3],
scope='Conv2d_0c_3x3')
with tf.variable_scope('Branch_3'):
branch_3 = slim.max_pool2d(net, [3, 3], scope='MaxPool_0a_3x3')
branch_3 = slim.conv2d(
branch_3, depth(128), [1, 1],
weights_initializer=trunc_normal(0.1),
scope='Conv2d_0b_1x1')
net = tf.concat(
axis=concat_dim, values=[branch_0, branch_1, branch_2, branch_3])
end_points[end_point] = net
if end_point == final_endpoint: return net, end_points
raise ValueError('Unknown final endpoint %s' % final_endpoint) def inception_v2(inputs,
num_classes=1000,
is_training=True,
dropout_keep_prob=0.8,
min_depth=16,
depth_multiplier=1.0,
prediction_fn=slim.softmax,
spatial_squeeze=True,
reuse=None,
scope='InceptionV2',
global_pool=False):
"""Inception v2 model for classification. Constructs an Inception v2 network for classification as described in
http://arxiv.org/abs/1502.03167. The default image size used to train this network is 224x224. Args:
inputs: a tensor of shape [batch_size, height, width, channels].
num_classes: number of predicted classes. If 0 or None, the logits layer
is omitted and the input features to the logits layer (before dropout)
are returned instead.
is_training: whether is training or not.
dropout_keep_prob: the percentage of activation values that are retained.
min_depth: Minimum depth value (number of channels) for all convolution ops.
Enforced when depth_multiplier < 1, and not an active constraint when
depth_multiplier >= 1.
depth_multiplier: Float multiplier for the depth (number of channels)
for all convolution ops. The value must be greater than zero. Typical
usage will be to set this value in (0, 1) to reduce the number of
parameters or computation cost of the model.
prediction_fn: a function to get predictions out of logits.
spatial_squeeze: if True, logits is of shape [B, C], if false logits is of
shape [B, 1, 1, C], where B is batch_size and C is number of classes.
reuse: whether or not the network and its variables should be reused. To be
able to reuse 'scope' must be given.
scope: Optional variable_scope.
global_pool: Optional boolean flag to control the avgpooling before the
logits layer. If false or unset, pooling is done with a fixed window
that reduces default-sized inputs to 1x1, while larger inputs lead to
larger outputs. If true, any input size is pooled down to 1x1. Returns:
net: a Tensor with the logits (pre-softmax activations) if num_classes
is a non-zero integer, or the non-dropped-out input to the logits layer
if num_classes is 0 or None.
end_points: a dictionary from components of the network to the corresponding
activation. Raises:
ValueError: if final_endpoint is not set to one of the predefined values,
or depth_multiplier <= 0
"""
if depth_multiplier <= 0:
raise ValueError('depth_multiplier is not greater than zero.') # Final pooling and prediction
with tf.variable_scope(scope, 'InceptionV2', [inputs], reuse=reuse) as scope:
with slim.arg_scope([slim.batch_norm, slim.dropout],
is_training=is_training):
net, end_points = inception_v2_base(
inputs, scope=scope, min_depth=min_depth,
depth_multiplier=depth_multiplier)
with tf.variable_scope('Logits'):
if global_pool:
# Global average pooling.
net = tf.reduce_mean(net, [1, 2], keep_dims=True, name='global_pool')
end_points['global_pool'] = net
else:
# Pooling with a fixed kernel size.
kernel_size = _reduced_kernel_size_for_small_input(net, [7, 7])
net = slim.avg_pool2d(net, kernel_size, padding='VALID',
scope='AvgPool_1a_{}x{}'.format(*kernel_size))
end_points['AvgPool_1a'] = net
if not num_classes:
return net, end_points
# 1 x 1 x 1024
net = slim.dropout(net, keep_prob=dropout_keep_prob, scope='Dropout_1b')
logits = slim.conv2d(net, num_classes, [1, 1], activation_fn=None,
normalizer_fn=None, scope='Conv2d_1c_1x1')
if spatial_squeeze:
logits = tf.squeeze(logits, [1, 2], name='SpatialSqueeze')
end_points['Logits'] = logits
end_points['Predictions'] = prediction_fn(logits, scope='Predictions')
return logits, end_points
inception_v2.default_image_size = 224 def _reduced_kernel_size_for_small_input(input_tensor, kernel_size):
"""Define kernel size which is automatically reduced for small input. If the shape of the input images is unknown at graph construction time this
function assumes that the input images are is large enough. Args:
input_tensor: input tensor of size [batch_size, height, width, channels].
kernel_size: desired kernel size of length 2: [kernel_height, kernel_width] Returns:
a tensor with the kernel size. TODO(jrru): Make this function work with unknown shapes. Theoretically, this
can be done with the code below. Problems are two-fold: (1) If the shape was
known, it will be lost. (2) inception.slim.ops._two_element_tuple cannot
handle tensors that define the kernel size.
shape = tf.shape(input_tensor)
return = tf.stack([tf.minimum(shape[1], kernel_size[0]),
tf.minimum(shape[2], kernel_size[1])]) """
shape = input_tensor.get_shape().as_list()
if shape[1] is None or shape[2] is None:
kernel_size_out = kernel_size
else:
kernel_size_out = [min(shape[1], kernel_size[0]),
min(shape[2], kernel_size[1])]
return kernel_size_out inception_v2_arg_scope = inception_utils.inception_arg_scope
|
参考资料 |
《图解深度学习与神经网络:从张量到TensorFlow实现》_张平
Rethinking the Inception Architecture for Computer Vision
深度学习面试题26:GoogLeNet(Inception V2)的更多相关文章
- 深度学习面试题29:GoogLeNet(Inception V3)
目录 使用非对称卷积分解大filters 重新设计pooling层 辅助构造器 使用标签平滑 参考资料 在<深度学习面试题20:GoogLeNet(Inception V1)>和<深 ...
- 深度学习(十) GoogleNet
GoogLeNet Incepetion V1 这是GoogLeNet的最早版本,出现在2014年的<Going deeper with convolutions>.之所以名为“GoogL ...
- 深度学习面试题27:非对称卷积(Asymmetric Convolutions)
目录 产生背景 举例 参考资料 产生背景 之前在深度学习面试题16:小卷积核级联卷积VS大卷积核卷积中介绍过小卷积核的三个优势: ①整合了三个非线性激活层,代替单一非线性激活层,增加了判别能力. ②减 ...
- 深度学习面试题13:AlexNet(1000类图像分类)
目录 网络结构 两大创新点 参考资料 第一个典型的CNN是LeNet5网络结构,但是第一个引起大家注意的网络却是AlexNet,Alex Krizhevsky其实是Hinton的学生,这个团队领导者是 ...
- 深度学习面试题20:GoogLeNet(Inception V1)
目录 简介 网络结构 对应代码 网络说明 参考资料 简介 2014年,GoogLeNet和VGG是当年ImageNet挑战赛(ILSVRC14)的双雄,GoogLeNet获得了第一名.VGG获得了第二 ...
- 深度学习面试题21:批量归一化(Batch Normalization,BN)
目录 BN的由来 BN的作用 BN的操作阶段 BN的操作流程 BN可以防止梯度消失吗 为什么归一化后还要放缩和平移 BN在GoogLeNet中的应用 参考资料 BN的由来 BN是由Google于201 ...
- 深度学习面试题18:网中网结构(Network in Network)
目录 举例 参考资料 网中网结构通过多个分支的运算(卷积或池化),将分支上的运算结果在深度上连接 举例 一个3*3*2的张量, 与3个1*1*2的卷积核分别same卷积,步长=1, 与2个2*2*2的 ...
- 深度学习面试题24:在每个深度上分别卷积(depthwise卷积)
目录 举例 单个张量与多个卷积核在深度上分别卷积 参考资料 举例 如下张量x和卷积核K进行depthwise_conv2d卷积 结果为: depthwise_conv2d和conv2d的不同之处在于c ...
- 深度学习面试题17:VGGNet(1000类图像分类)
目录 VGGNet网络结构 论文中还讨论了其他结构 参考资料 2014年,牛津大学计算机视觉组(Visual Geometry Group)和Google DeepMind公司的研究员一起研发出了新的 ...
随机推荐
- Jmeter学习笔记(十)——元件的作用域和执行顺序
jmeter是一个开源的性能测试工具,它可以通过鼠标拖拽来随意改变元件之间的顺序以及元件的父子关系,那么随着它们的顺序和所在的域不同,它们在执行的时候,也会有很多不同. jmeter的test pla ...
- 将Centos7的yum配置为阿里云的镜像(完美解决yum下载太慢的问题)
2017-02-17 16:02:30 张老湿 阅读数 13768 http://mirrors.aliyun.com/help/centos?spm=5176.bbsr150321.0.0. ...
- 二十三、mysql索引管理详解
一.索引分类 分为聚集索引和非聚集索引. 聚集索引 每个表有且一定会有一个聚集索引,整个表的数据存储在聚集索引中,mysql索引是采用B+树结构保存在文件中,叶子节点存储主键的值以及对应记录的数据,非 ...
- AxureRP分页签 / Tab选项卡切换功能~
最终结果图如下: 实现过程: 1.从元件库中拖一个动态面板,调整所需大小,接下来的步骤都通过双击动态面板来完成. 2.双击动态面板,弹出框“面板状态管理”,新建状态并命名.此处新建了TAB1.TAB2 ...
- Python 中 plt 画柱状图和折线图
1. 背景 Python在一些数据可视化的过程中需要使用 plt 函数画柱状图和折线图. 2. 导入 import matplotlib.pyplot as plt 3. 柱状图 array= np. ...
- Kotlin扩展深入解析及注意事项和可见性
可见性[Visibility]: 在Java中的可见性有public.protected.private.default四种,而在Kotlin中也有四种:public.protected.privat ...
- 第三天Beta冲刺
团队作业Beta冲刺 项目 内容 这个作业属于哪个课程 任课教师博客主页链接 这个作业的要求在哪里 作业链接地址 团队名称 你们都是魔鬼吗 作业学习目标 (1)掌握软件黑盒测试技术:(2)学会编制软件 ...
- Follow My Heart
看到这个题目,能够让我不断跟随自己的心去奋斗,当然在这之中也有过彷徨,有过偷懒,但最终还是依然坚强,依然保持着一种积极向上的心情去迎接每一天. 这一年从大三升到大四,瞬间觉得自己成长了很多,身上的责任 ...
- 2019-2020-1 20199301《Linux内核原理与分析》第七周作业
第六章 进程的描述和进程的创建 学习笔记 1.操作系统的三大管理功能: 进程管理 内存管理 文件系统 2.操作系统最核心的功能是进程管理. 3.为了管理进程,内核要描述进程的结构,也成为进程描述符,进 ...
- 《Flask Web开发实战:入门、进阶与原理解析》 学习笔记
一个视图函数可以绑定多个 URL 为了让互联网上的人都可以访问,需要安装程序的服务器有公网ip 如果过度使用扩展,在不需要 的地方引人,那么相应也会导致代码不容易维护 ,应该尽量从实际需求出发,只在需 ...