MPU6050
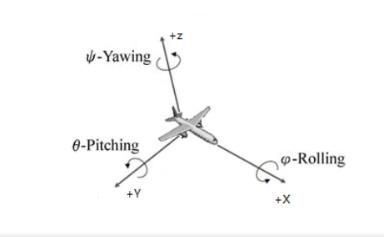
MPU6050: Pitch,Roll,Yaw旋转方向遵循右手定则
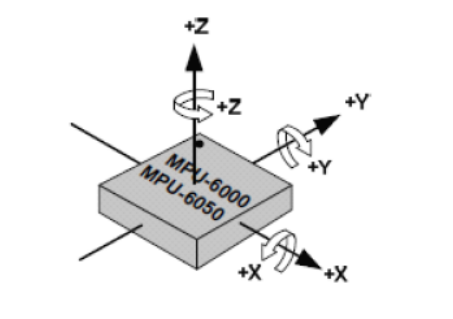
pith角 –绕Y轴(俯仰) 范围:±90° ,与旋转方向相反转是增大 -- 抬头为正,低头为负
roll角 –绕X轴(横滚) 范围:±180° ,与旋转方向相反转是增大 -- 右滚为正,左滚为负
yaw角 –绕z轴(偏航) 范围:±180° ,与旋转方向相反转是增大 --右偏为正,左偏为负
飞机与MPU6050姿态角的关系:
DMP:输出四个数(四元数),经公式转换后得到姿态角pith ,roll,yaw。
(1)使用DMP可以减小主控运算负担,得到的数据不需要滤波 (自己已经进行数据处理)
(2)原始数据—互补滤波—融合算法
MPU6050的更多相关文章
- [异常解决] MPU6050启动异常读出陀螺仪和加速度计的值全为0的解决办法
在调试一个自己做的手环,每次用keil烧写好程序运行的蓝牙.陀螺仪都是正常的.但是掉电再上电之后蓝牙是好的.陀螺仪可以读出ID但是读出的加速度和角速度数据全为0. 下面是发生问题时main函数的前面部 ...
- 4、CC2541芯片中级教程-OSAL操作系统(简单AT指令实现+IIC软件和硬件实现驱动MPU6050)
本文根据一周CC2541笔记汇总得来—— 适合概览和知识快速索引—— 全部链接: 中级教程-OSAL操作系统\OSAL操作系统-实验01 OSAL初探 [插入]SourceInsight-工程建立方法 ...
- [体感游戏] 1、MPU6050数据采集传输与可视化
最近在研究体感游戏,到目前为止实现了基于51单片机的MPU6050数据采集.利用蓝牙模块将数据传输到上位机,并利用C#自制串口数据高速采集软件,并且将数据通过自制的折线图绘制模块可视化地展示出来等功能 ...
- 六轴加速度传感器MPU6050官方DMP库到瑞萨RL78/G13的移植
2015年的电赛已经结束了.赛前接到器件清单的时候,看到带防护圈的多旋翼飞行器赫然在列,又给了一个瑞萨RL78/G13的MCU,于是自然联想到13年的电赛,觉得多半是拿RL78/G13做四旋翼的主控, ...
- [芯片][MPU6050] MPU60X0的DMP相关链接
标题:发个自己做的UD分解+强跟踪卡尔曼滤波做的双轴姿态测量 链接:http://www.amobbs.com/thread-5511854-1-1.html 关键词:UD分解+强跟踪卡尔曼滤波,采用 ...
- [stm32] MPU6050 HMC5883 Kalman 融合算法移植
一.卡尔曼滤波九轴融合算法stm32尝试 1.Kalman滤波文件[.h已经封装为结构体] /* Copyright (C) 2012 Kristian Lauszus, TKJ Electronic ...
- 重力加速度陀螺仪传感器MPU-6050(一)
MPU-60X0 对陀螺仪和加速度计分别用了三个16 位的ADC,将其测量的模拟量转化 为可输出的数字量.为了精确跟踪快速和慢速的运动,传感器的测量范围都是用户可控的,陀螺仪可测范围为±250,±50 ...
- 四轴飞行器1.3 MPU6050(大端)和M4的FPU开启方法
四轴飞行器1.3 MPU6050(大端)和M4的FPU开启方法 原创文章,欢迎转载,转载请注明出处 最近时间花在最多的地方就是STM32的I2C上了.之前就知道STM32的I2C并不好用, ...
- STM32驱动MPU6050
轴 MEMS轴 MEMS 加速度计,以及一个可扩展的数字运动处理器 DMP(Digital Motion Processor),可用 I2C 接口连接一个第三方的数字传感器,比如磁力计.扩展之后就可以 ...
- MPU6050首例整合性6轴的姿态模块(转)
源:MPU6050首例整合性6轴的姿态模块 Mpu6050为全球首例整合3轴陀螺仪.3轴加速器.含9轴融合演:MPU-6000为全球首例整合性6轴运动处理组件,相较于多组件方案,免除了组合陀螺仪与加速 ...
随机推荐
- ENode, 领域模型,DDD
Entity Framework之领域驱动设计实践 使用ENode框架前您需要了解的东西(初稿) 领域驱动设计实战--战略建模 http://www.cnblogs.com/yubaolee/p/Ca ...
- ASP.NET界面重定向传值
这么说吧,当程序启动时,ASP.NET会自动创建一些经常使用的类的实例,而这些实例就是ASP.NET的内置对象,常用的实例对象有:Response(来自HttpResponse类).Request(来 ...
- python mmap对象
----使用内存映射的原因 为了随机访问文件的内容,使用mmap将文件映射到内存中是一个高效和优雅的方法.例如,无需打开一个文件并执行大量的seek(),read(),write()调用,只需要简单的 ...
- Sqoop 学习之路
sqoop 基础知识和基本操作可以参考这篇博客:https://www.cnblogs.com/qingyunzong/p/8807252.html#_label3
- maven 入门 (二)
上一篇写了,怎么在在项目中用到maven,怎么安装maven及创建maven工程. 现在的话说一下怎么使用maven来下载jar包,呵呵.和maven的一些配置. 打开maven-config-set ...
- html5水平方向重力感应
html5图片随手机重力感应而移动 <!DOCTYPE html> <html lang="zh-cn"><head><meta http ...
- centos6使用yum安装python3和pip3
在安装了epel源的情况下,直接yum就可以安装python3.4 #yum install python34 -y# python3 --versionPython 3.4.5 没有自带pip3,需 ...
- shell =~ 引发的思考
=~不是按位取反 1.[[]] if [[]]中引用变量不用加 双引号(")了,而if[]中变量必须加双引号,如if[ -n "$test" ],不然一些特殊的地方,会出 ...
- C调用java JNI_CreateJavaVM只能调用成功一次
https://bbs.csdn.net/topics/392264971 再使用c语言调用java代码的时候,选择使用JNI,根据网上的提示已经能够正常跑了,int mask_name( char* ...
- python协程之动态添加任务
https://blog.csdn.net/qq_29349715/article/details/79730786 python协程只能运行在事件循环中,但是一旦事件循环运行,又会阻塞当前任务.所以 ...