基于机器人自主移动实现SLAM建图
基于[移动机器人运动规划及运动仿真],详见之前的博客
参考链接
环境配置
ubuntu 18.04
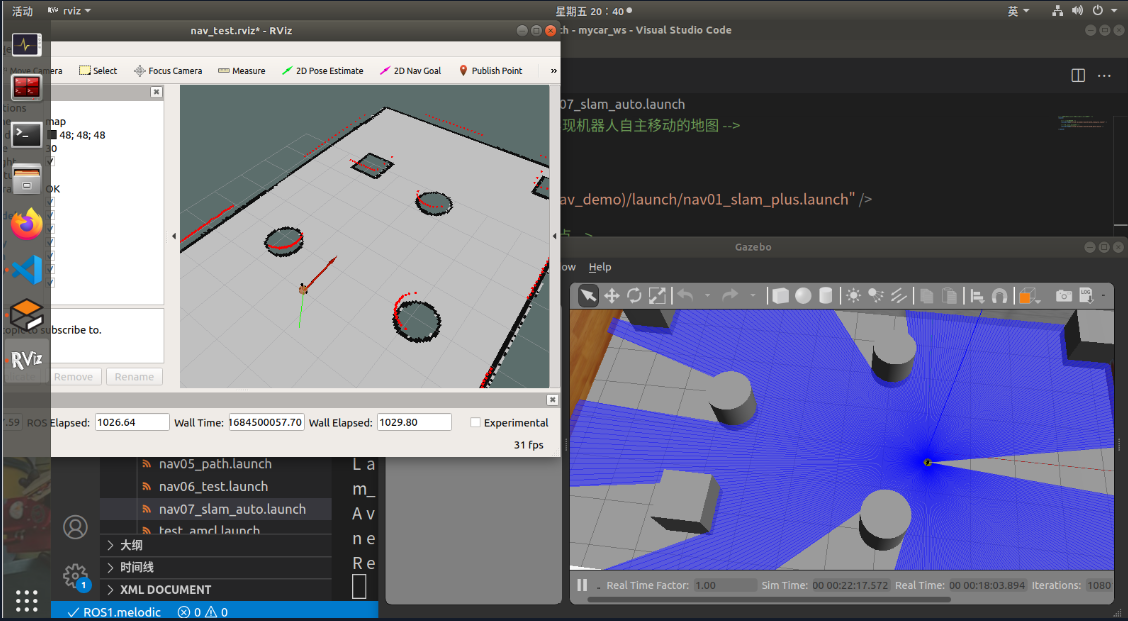
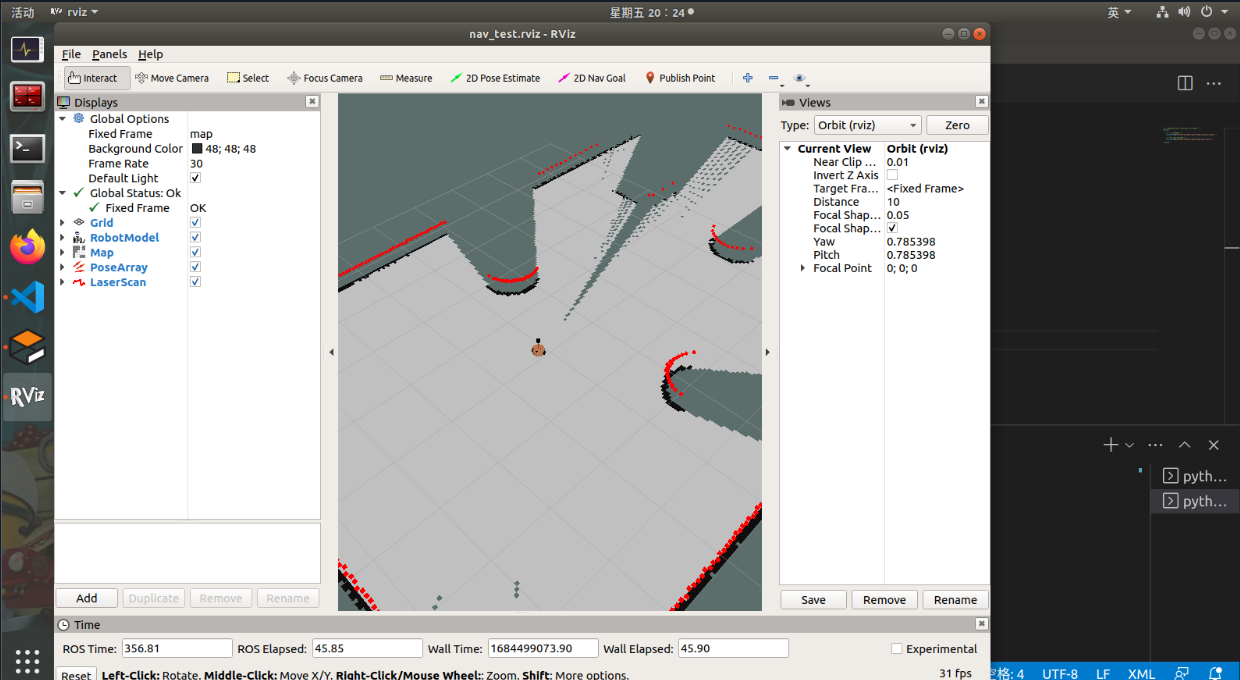
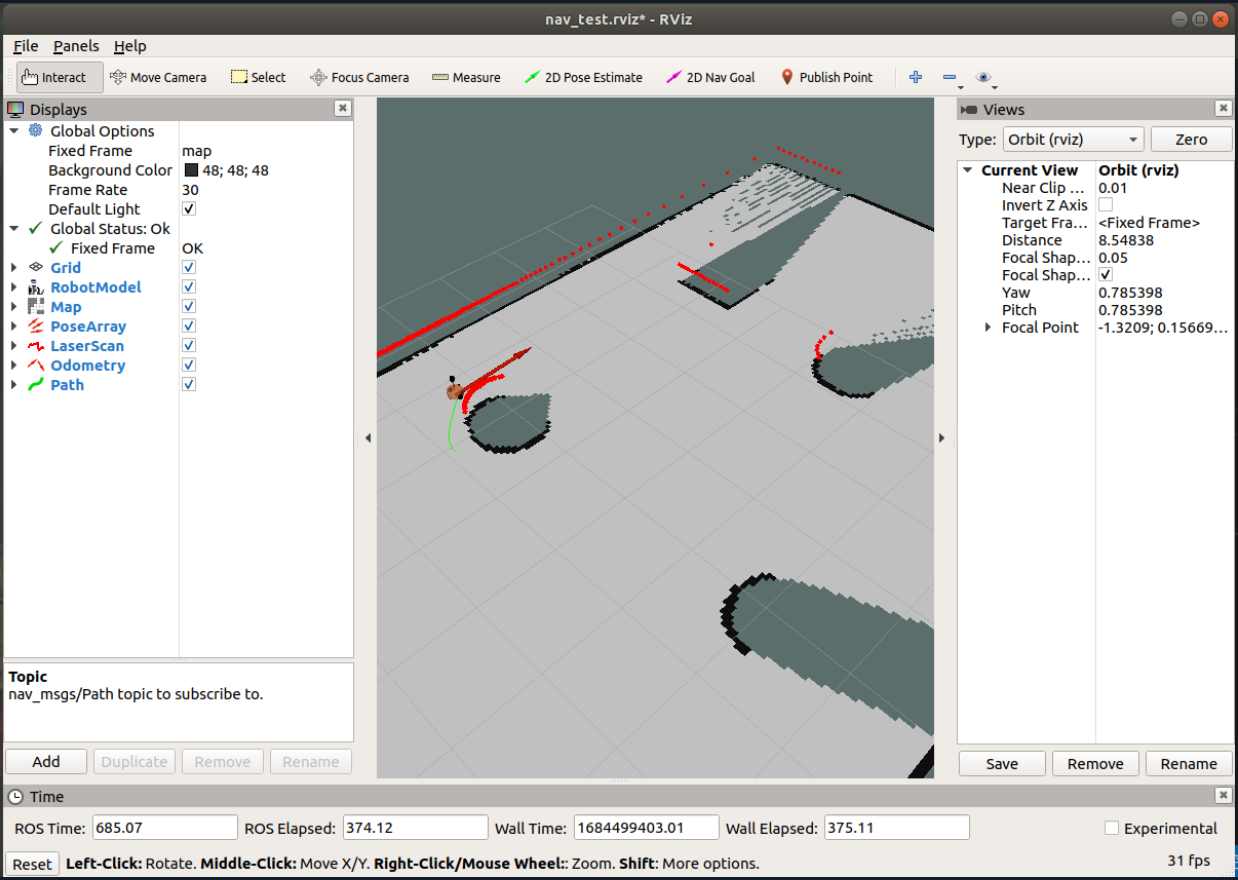
成果图
编写 launch 文件
mycar_ws/src/nav_demo/launch/nav01_slam_plus.launch
<launch>
<!-- 仿真环境下,将该参数设置为true -->
<param name="use_sim_time" value="true"/>
<!-- gmapping -->
<node pkg="gmapping" type="slam_gmapping" name="slam_gmapping" output="screen">
<!-- 设置雷达话题 -->
<remap from="scan" to="scan"/>
<!-- 关键参数:坐标系 -->
<param name="base_frame" value="base_footprint"/><!--底盘坐标系-->
<param name="map_frame" value="map"/>
<param name="odom_frame" value="odom"/> <!--里程计坐标系-->
<param name="map_update_interval" value="5.0"/>
<param name="maxUrange" value="16.0"/>
<param name="sigma" value="0.05"/>
<param name="kernelSize" value="1"/>
<param name="lstep" value="0.05"/>
<param name="astep" value="0.05"/>
<param name="iterations" value="5"/>
<param name="lsigma" value="0.075"/>
<param name="ogain" value="3.0"/>
<param name="lskip" value="0"/>
<param name="srr" value="0.1"/>
<param name="srt" value="0.2"/>
<param name="str" value="0.1"/>
<param name="stt" value="0.2"/>
<param name="linearUpdate" value="1.0"/>
<param name="angularUpdate" value="0.5"/>
<param name="temporalUpdate" value="3.0"/>
<param name="resampleThreshold" value="0.5"/>
<param name="particles" value="30"/>
<param name="xmin" value="-50.0"/>
<param name="ymin" value="-50.0"/>
<param name="xmax" value="50.0"/>
<param name="ymax" value="50.0"/>
<param name="delta" value="0.05"/>
<param name="llsamplerange" value="0.01"/>
<param name="llsamplestep" value="0.01"/>
<param name="lasamplerange" value="0.005"/>
<param name="lasamplestep" value="0.005"/>
</node>
<node pkg="joint_state_publisher" name="joint_state_publisher" type="joint_state_publisher" />
<node pkg="robot_state_publisher" name="robot_state_publisher" type="robot_state_publisher" />
<node pkg="rviz" type="rviz" name="rviz" args="-d $(find nav_demo)/config/nav_test.rviz"/>
</launch>
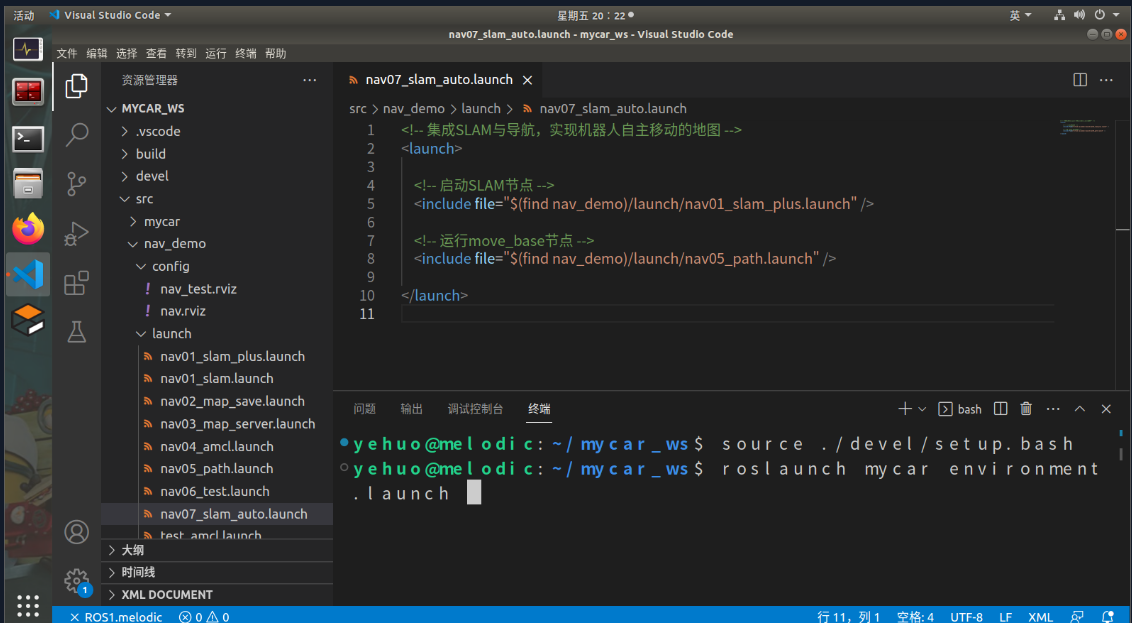
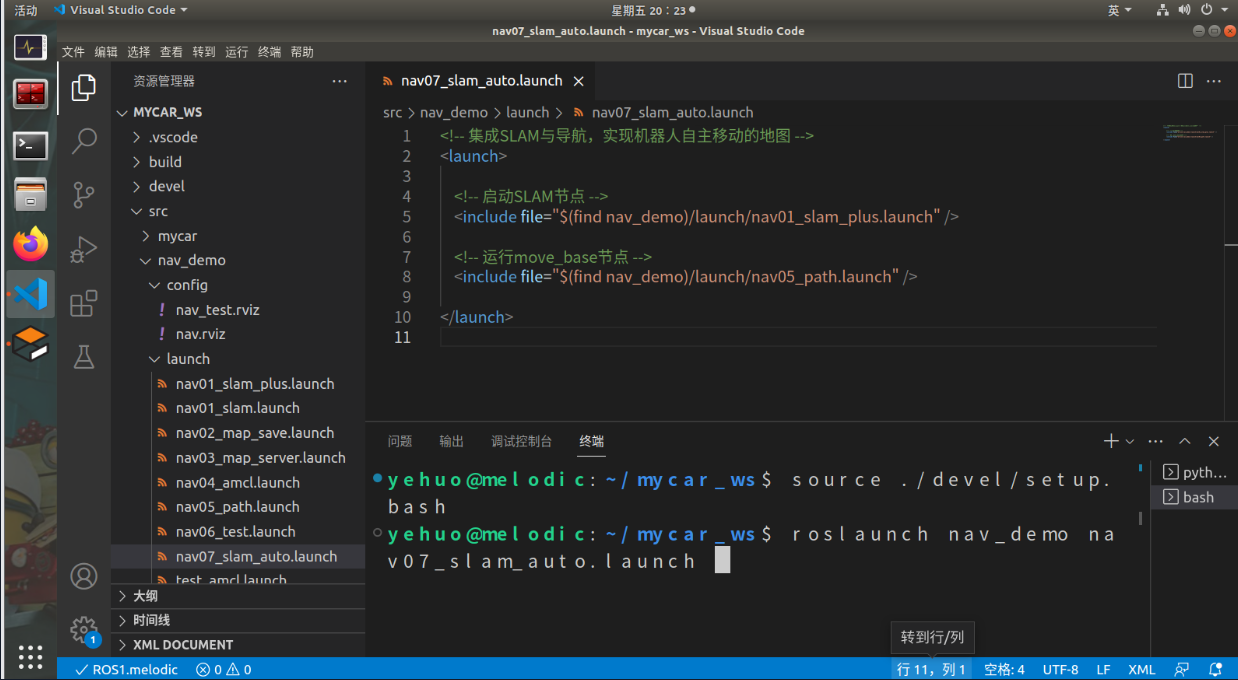
mycar_ws/src/nav_demo/launch/nav07_slam_auto.launch
<!-- 集成SLAM与导航,实现机器人自主移动的地图 -->
<launch>
<!-- 启动SLAM节点 -->
<include file="$(find nav_demo)/launch/nav01_slam_plus.launch" />
<!-- 运行move_base节点 -->
<include file="$(find nav_demo)/launch/nav05_path.launch" />
</launch>
编译+启动 gazebo 仿真环境
source ./devel/setup.bash
roslaunch mycar environment.launch
编译+启动 rviz
source ./devel/setup.bash
roslaunch nav_demo nav06_test.launch

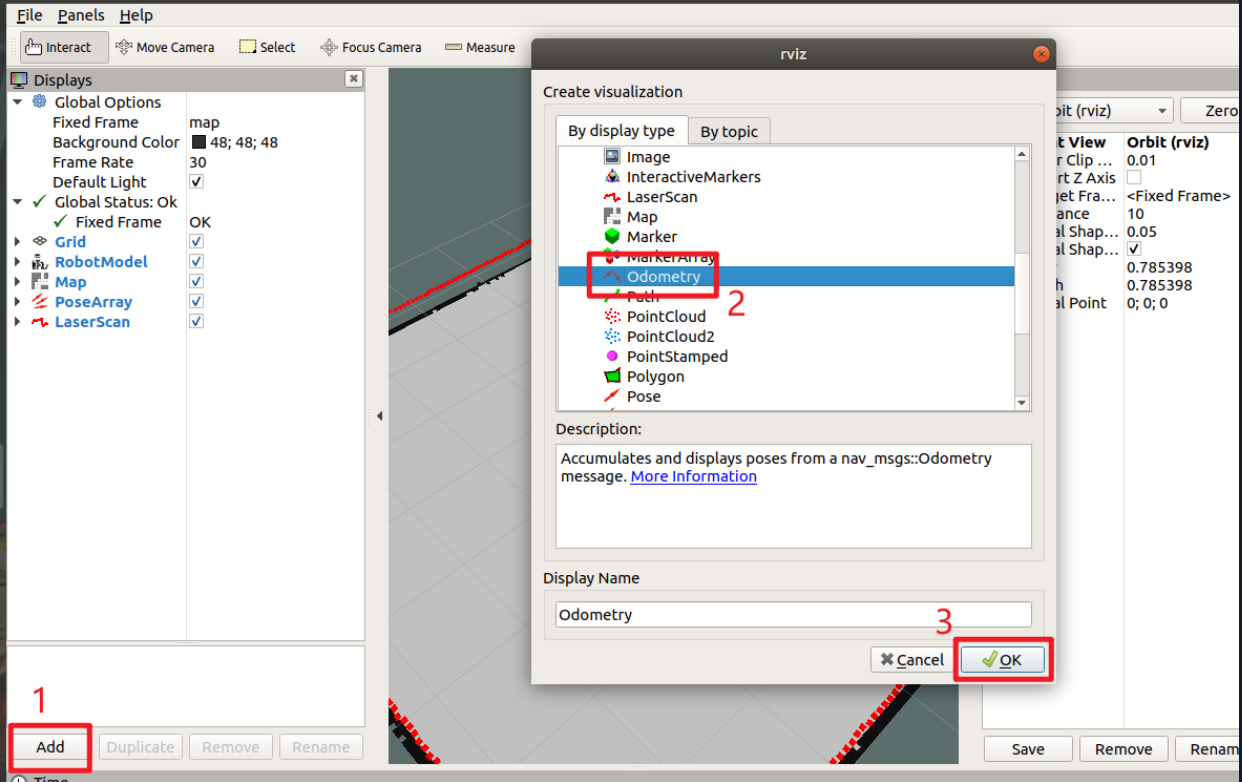
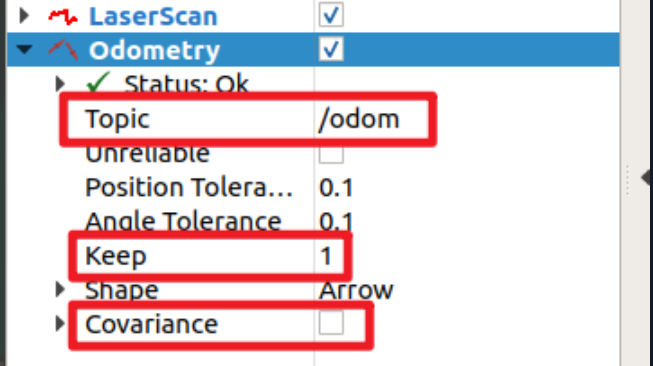
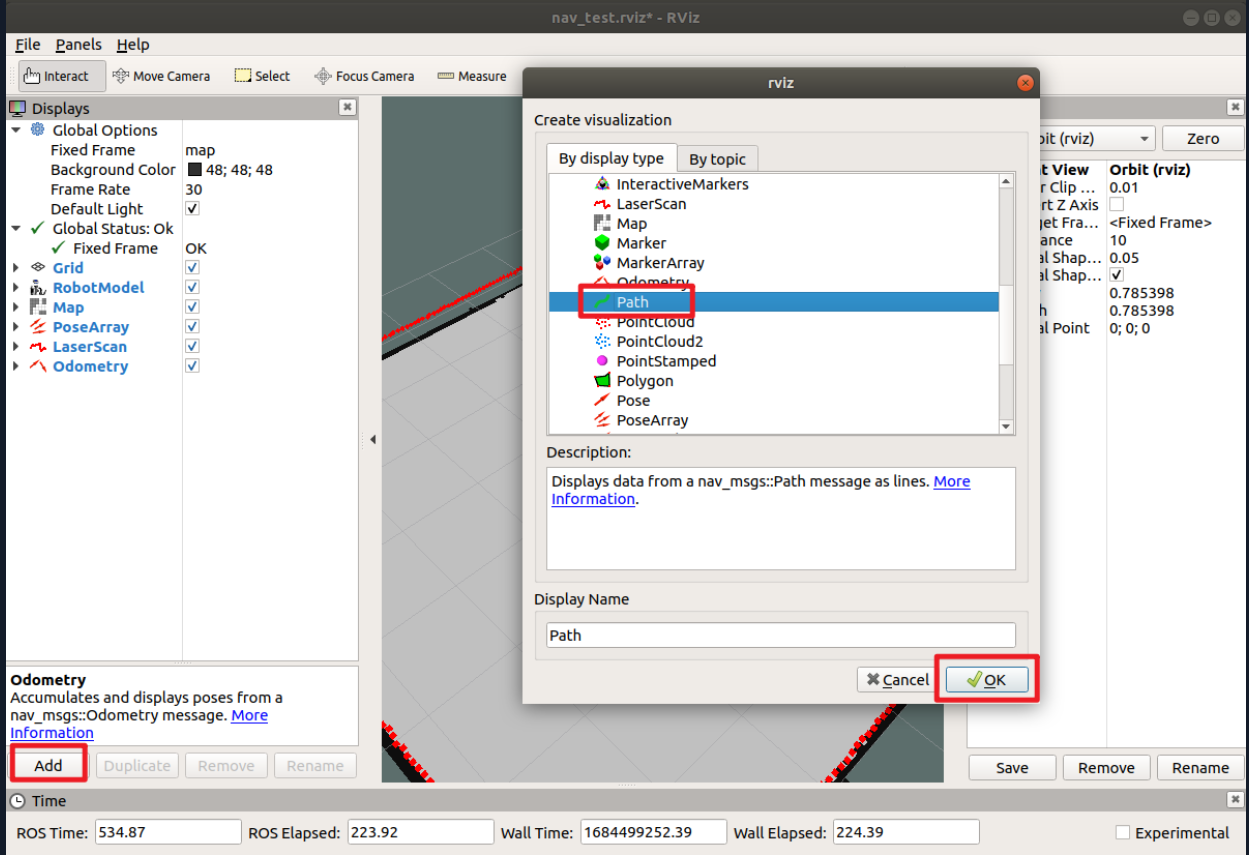
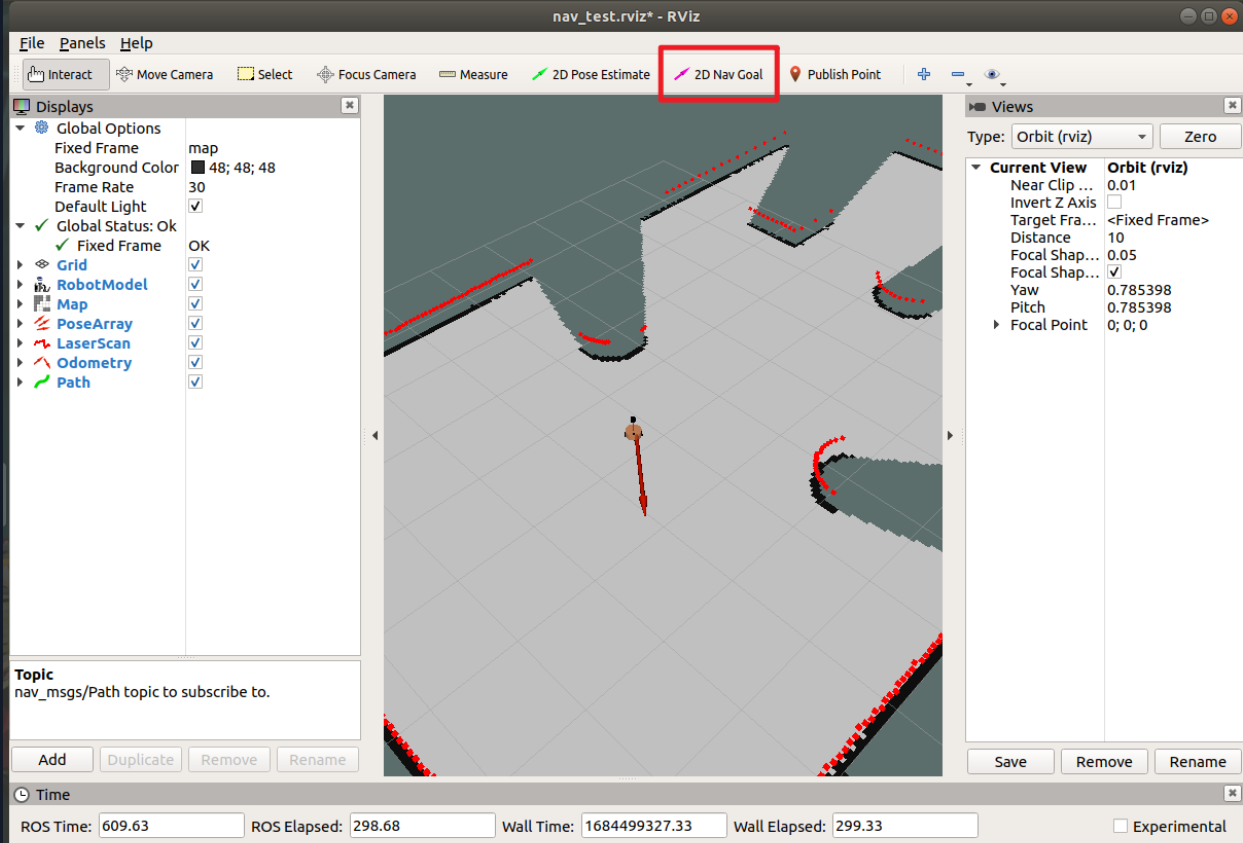
配置 rviz
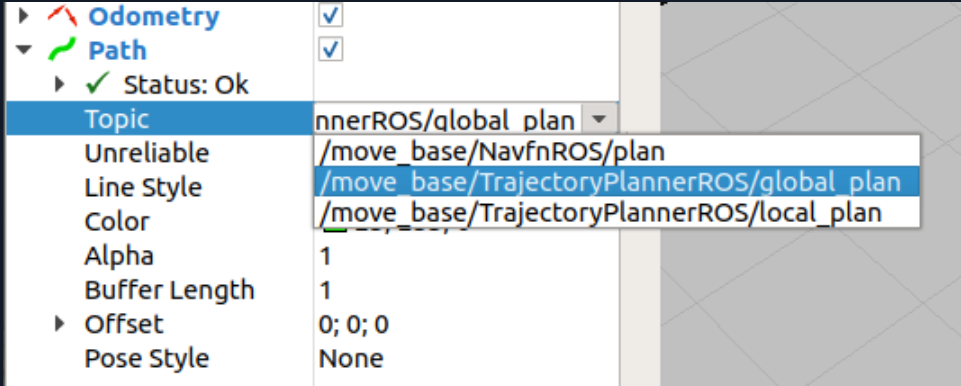
运行测试

基于机器人自主移动实现SLAM建图的更多相关文章
- SLAM+语音机器人DIY系列:(六)SLAM建图与自主避障导航——2.google-cartographer机器人SLAM建图
摘要 通过前面的基础学习,本章进入最为激动的机器人自主导航的学习.在前面的学习铺垫后,终于迎来了最大乐趣的时刻,就是赋予我们的miiboo机器人能自由行走的生命.本章将围绕机器人SLAM建图.导航避障 ...
- cartographer环境建立以及建图测试(详细级)
- 机器人自主移动的秘密:实际应用中,SLAM究竟是如何实现的?(二)
博客转载自:https://www.leiphone.com/news/201612/FRzmoEI8Iud6CmT2.html 雷锋网(公众号:雷锋网)按:本文作者SLAMTEC(思岚科技公号sla ...
- 基于ros2 dashing的建图导航探索
基于ros2 dashing的建图导航探索 1. 环境准备 安装ros2 dashing, 参考链接: https://index.ros.org/doc/ros2/Installation/Dash ...
- 机器人自主移动的秘密,从SLAM技术说起(一)
博客转载自:https://www.leiphone.com/news/201609/c35bn1M9kgVaCCef.html 雷锋网(公众号:雷锋网)按:本文作者SLAMTEC(思岚科技公号sla ...
- 除了ROS ,机器人自主定位导航还能怎么做?
博客转载自:https://www.leiphone.com/news/201609/10QD7yp7JFV9H9Ni.html 雷锋网(公众号:雷锋网)按:本文作者科技剪刀手,思岚科技技术顾问. 随 ...
- 从零开始一起学习SLAM | 理解图优化,一步步带你看懂g2o代码
首发于公众号:计算机视觉life 旗下知识星球「从零开始学习SLAM」 这可能是最清晰讲解g2o代码框架的文章 理解图优化,一步步带你看懂g2o框架 小白:师兄师兄,最近我在看SLAM的优化算法,有种 ...
- 使用hector-slam和Kinect V1建图
一.建图实际操作 下载源码测试源码,depthimage_to_laserscan,参考https://blog.csdn.net/u010925447/article/details/5649468 ...
- ROS 八叉树地图构建 - 使用 octomap_server 建图过程总结!
构建语义地图时,最开始用的是 octomap_server,后面换成了 semantic_slam: octomap_generator,不过还是整理下之前的学习笔记. 一.增量构建八叉树地图步骤 为 ...
- TurtleBot3 Waffle (tx2版华夫)(9)建图-gmapping建图(A2雷达)
9.1. 说明 这一节我们来讲 Turtlebot3 的 SLAMSLAM(The Simultaneous Localization and Mapping) 同步定位与地图构建: 希望机器人从未知 ...
随机推荐
- 使用 Vue 3 时应避免的 10 个错误
Vue 3已经稳定了相当长一段时间了.许多代码库都在生产环境中使用它,其他人最终都将不得不迁移到Vue 3.我现在有机会使用它并记录了我的错误,下面这些错误你可能想要避免. 使用Reactive声明原 ...
- Cryptanalyzing and Improving a Novel Color Image Encryption Algorithm Using RT-Enhanced Chaotic Tent Maps
Cryptanalyzing and Improving a Novel ColorImage Encryption Algorithm Using RT-EnhancedChaotic Tent M ...
- ROS话题通信C++(附launch启动方式)
ROS话题通信C++(附launch启动方式) 创建工作空间 mkdir -p topic_ws/src cd topic_ws catkin_make 设置环境变量 source ./devel/s ...
- 咕咕list
做完以后会留在榜上一天,这样显得咕咕list长一些 CF666E Forensic Examination(done on 2023.2.6) dp选做
- Oracle数据库 insert 插入数据 显示问号乱码的解决办法
一.问题描述 插入的中文数据 显示成问号(乱码),其他语言如老挝文.柬文等都一样. 二.解决方案 plsql插入oracle数据乱码问题处理起来其实很简单,因为乱码问题一般都是由于编码不一致导致的,我 ...
- Windows系统下载最新版Windows10 iso映像
在电脑PC端如何下载最新版的完整Windows10 iso映像?打开https://www.microsoft.com/zh-cn/software-download/windows10/页面,是不能 ...
- Leetcode Practice -- 字符串
目录 14. 最长公共前缀 思路解析 151. 反转字符串中的单词 思路解析 125. 验证回文串 思路解析 415. 字符串相加 思路解析 3. 无重复字符的最长子串 思路解析 8. 字符串转换整数 ...
- 万字长文带你入门docker
1 Docker dockerfiler 镜像构建 Compose是在单机进行容器编排 Horbor 镜像仓库 Docker swarm 在多机进行容器编排 Docker Compose缺点是不能在分 ...
- 当后端人员未提供接口,前端人员该怎么测试 --mock
1.回顾 2.线上的mock http://rap2.taobao.org/ https://www.easy-mock.com/ 3.线上接口文档 Swagger https://swagger.i ...
- InnoDB Buffer Pool改进LRU页面置换
由于硬盘和内存的造价差异,一台主机实例的硬盘容量通常会远超于内存容量.对于数据库等应用而言,为了保证更快的查询效率,通常会将使用过的数据放在内存中进行加速读取. 数据页与索引页的LRU 数据页和索引页 ...