TurtleBot3 Waffle (tx2版华夫)(9)建图-gmapping建图(A2雷达)
9.1. 说明
这一节我们来讲 Turtlebot3 的 SLAM
SLAM(The Simultaneous Localization and Mapping) 同步定位与地图构建: 希
望机器人从未知环境的未知地点出发, 在运动过程中通过重复观测到的地图特征(比如, 墙角, 柱子等) 定位自身位置和姿态, 再根据自身位置增量式的构建地图,从而达到同时定位和地图构建的目的。 (维基百科)
9.2.通过远程操作创建地图
1)[Remote PC] 启动roscore
$ roscore
1)[TurBot3] 启动turbot3
$ roslaunch turbot3_bringup minimal.launch
2)[TurBot3] 运行SLAM启动文件
$ roslaunch turbot3_slam gmapping_demo.launch
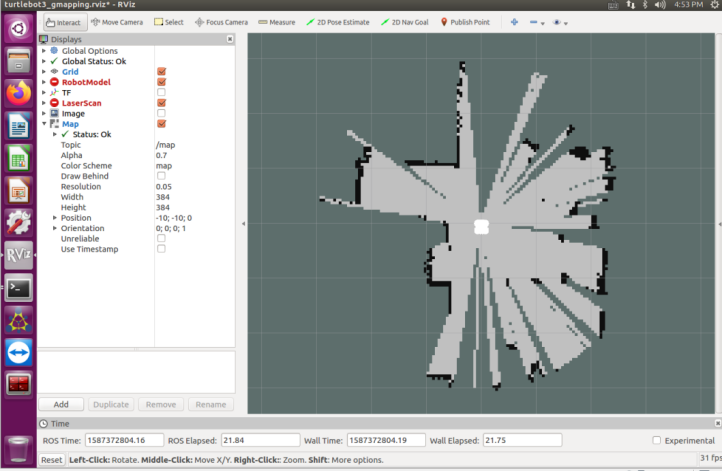
3)[Remote PC] 启动Rviz可视化模型
$ roslaunch turbot3_rviz navigation_rviz.launch
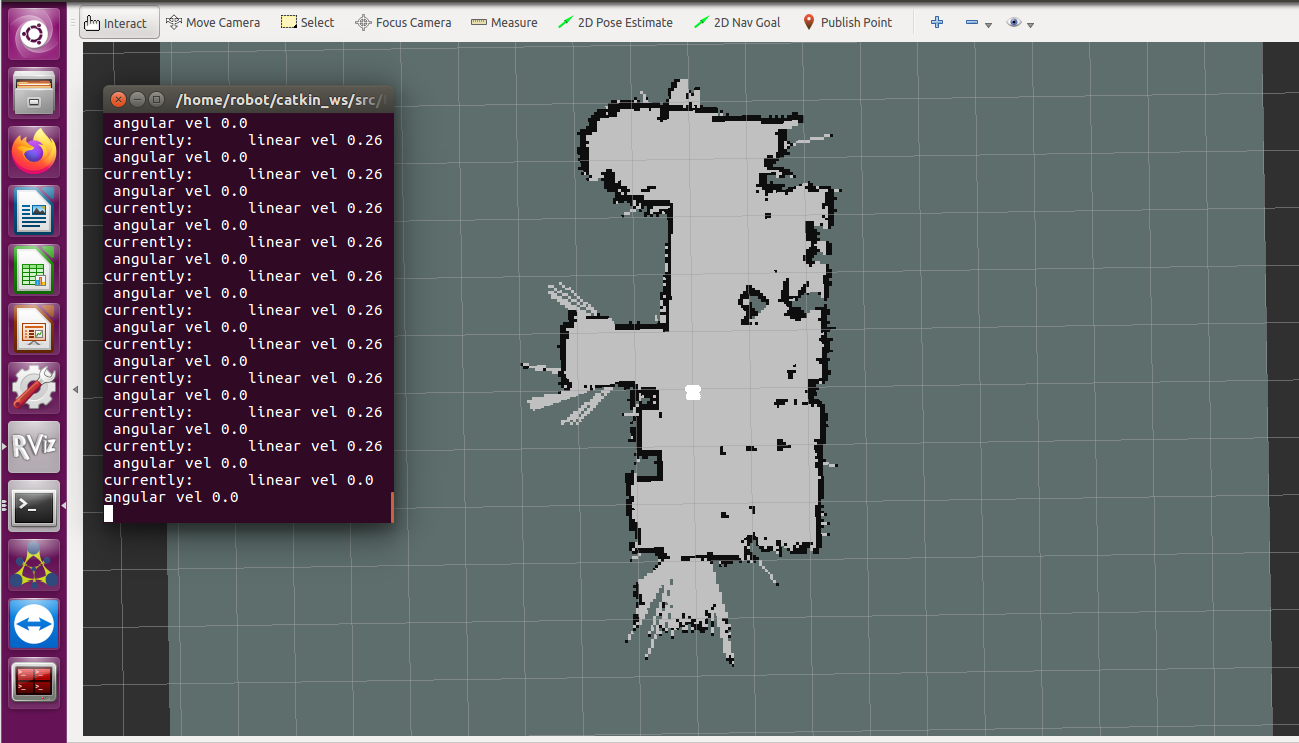
4)[Remote PC] 启动键盘操作
$ roslaunch turbot3_teleop keyboard.launch
移动turbot3进行建图
5)[TurBot3] 完成建图后运行地图保存节点
$ rosrun map_server map_saver -f ~/map
map.pgm和map.yaml 在 ~/ 目录里创建

TurtleBot3 Waffle (tx2版华夫)(9)建图-gmapping建图(A2雷达)的更多相关文章
- TurtleBot3 Waffle (tx2版华夫)(12)建图-hector建图
1)[Remote PC] 启动roscore $ roscore 2)[TurBot3] 启动turbot3 $ roslaunch turbot3_bringup minimal.launch 3 ...
- TurtleBot3 Waffle (tx2版华夫)(11)建图-karto建图
1)[Remote PC] 启动roscore $ roscore 2)[TurBot3] 启动turbot3 $ roslaunch turbot3_bringup minimal.launch 3 ...
- TurtleBot3 Waffle (tx2版华夫)(10)自主导航(A2激光雷达)
1)[Remote PC] 启动roscore $ roscore 2)[TurBot3] 启动turbot3 $ roslaunch turbot3_bringup minimal.launch 3 ...
- TurtleBot3 Waffle (tx2版华夫)(5)激活你的雷达
重要提示:请在配网通信成功后进行操作,配网后再次开机需要重新验证通信: 重要提示:[Remote PC]代表PC端.[TurtelBot]代表树莓派端: 5.1.操作步骤 1)[Remote PC] ...
- TurtleBot3 Waffle (tx2版华夫)(4)笔记本与TX2的通信
4.1. 使用vnc控制华夫Turbot3-Tx2开发板 1) 电脑端安装vnc viewer,您可以选择应用商城下载安装即可: 2) 下载后打开,键入Turbot3的ip à回车à选择连接: 3) ...
- TurtleBot3 Waffle (tx2版华夫)(2)系统安装
Tx2系统默认是安装好的,由于镜像文件大于20G,无法上传百度网盘,所以如有需要请联系我们客服:下面主要是操作步骤: 2.1.准备工作 a.准备好利用Jetpack刷过机的Ubuntu的主机(HOST ...
- TurtleBot3 Waffle (tx2版华夫)(13)RC100遥控杆控制
13.1.遥控器说明 使用ROBOTIS RC100的设置已经在ROS的OpenCR固件中,因此不需要安装必需软件包, 安装号即可使用. 13.2.遥控器的安装 1接线口穿过后壳的过孔. 2接线口连接 ...
- TurtleBot3 Waffle (tx2版华夫)(8)键盘控制
1)[Remote PC] 启动roscore $ roscore 2)[Turbot3] 启动turbot3 $ roslaunch turbot3_bringup minimal.launch 3 ...
- TurtleBot3 Waffle (tx2版华夫)(7)底盘测试
说明:opencr本身带有自测底盘功能,通过按opencr的sw1和sw2来自检底盘是否正确安装和运行: 7.1.前进测试 1)测试前,先把小车架空,轮子不要着地: 2)接好电源后,打开opencr的 ...
随机推荐
- 学习工具---maven
写在前面 为什么要用maven? 作为一跨平台的项目管理工具,它有着以下丰富的应用场景: 作为程序员,有相当一部分时间花在编译.运行单元测试.生成文档.打包.部署和发布等不起眼的工作上,而maven将 ...
- 第十二章 Python标准库内置模块和包简介
在<第十章 Python的模块和包>老猿详细介绍了Python模块和包的相关概念,模块和包是Python功能扩展的重要手段,也是Python开放的重要特征.为了提供强大的能力,Python ...
- 第12.7节 Python标准库内置模块小结
本章老猿走马观花般的介绍了一下前面没有介绍的内置模块,内容很多,介绍的很泛,介绍的目的只是让大家知道有哪些内置模块.大致的功能有哪些,以后要使用时大家可以再去详细研究.之所以采用这种方式,一是老猿时间 ...
- 建立windows认证模式下的用户登录
第一步:点击控制面板-----管理工具------计算机管理 ,在操作系统的计算机管理界面下,展开本地用户和组,在用户下建立三个用户u1,u2,u3,密码与用户名相同,如图所示. 然后新建一个组叫QQ ...
- SQL Server 批量插入数据方案 SqlBulkCopy 的简单封装,让批量插入更方便
一.Sql Server插入方案介绍 关于 SqlServer 批量插入的方式,有三种比较常用的插入方式,Insert.BatchInsert.SqlBulkCopy,下面我们对比以下三种方案的速度 ...
- STL-Vector容量问题:
1.clear,erase ,pop_back() 函数只删除对象,并没有释放vec中的内存,若对象是指针还需要delete:2.在erase,clear,pop_back()删除对象的后,size改 ...
- P4317 花神的数论题,关于luogu题解粉兔做法的理解
link 题意 设 \(\text{sum}(i)\) 表示 \(i\) 的二进制表示中 \(1\) 的个数.给出一个正整数 \(N\) ,求 \(\prod_{i=1}^{N}\text{sum}( ...
- 【Codeforces 809E】Surprise me!(莫比乌斯反演 & 虚树)
Description 给定一颗 \(n\) 个顶点的树,顶点 \(i\) 的权值为 \(a_i\).求: \[\frac{1}{n(n-1)}\sum_{i=1}^n\sum_{j=1}^n\var ...
- STL——容器(List)list 的大小操作
ist.size(); //返回容器中元素的个数 1 #include <iostream> 2 #include <list> 3 4 using namespace std ...
- Java中四舍五入
1.Math中四舍五入的方法 Math.ceil(double a)向上舍入,将数值向上舍入为最为接近的整数,返回值是double类型 Math.floor(double a)向下舍入,将数值向下舍入 ...