ROS学习笔记(二) :使用roslaunch
roslaunch
roslaunch是ros自带的一个库,使用roslaunch可以同时运行多个节点,通过编写launch文件来配置各个节点
roslaunch的使用
以turtlesim为例
首先保证环境变量中是否有catkin_ws工作空间的路径
echo $ROS_PACKAGE_PATH
若无,则进入该工作空间的根目录,执行
source devel/setup.bash
之后在任意目录下都可以进入之前创建的程序包
roscd beginner_tutorials
新建launch文件夹,在里面创建launch文件
mkdir launch
gedit turtlemimic.launch
拷贝以下launch文件的内容:
http://wiki.ros.org/cn/ROS/Tutorials/UsingRqtconsoleRoslaunch
<launch>
<group ns="turtlesim1">
<node pkg="turtlesim" name="sim" type="turtlesim_node"/>
</group>
<group ns="turtlesim2">
<node pkg="turtlesim" name="sim" type="turtlesim_node"/>
</group>
<node pkg="turtlesim" name="mimic" type="mimic">
<remap from="input" to="turtlesim1/turtle1"/>
<remap from="output" to="turtlesim2/turtle1"/>
</node>
</launch>
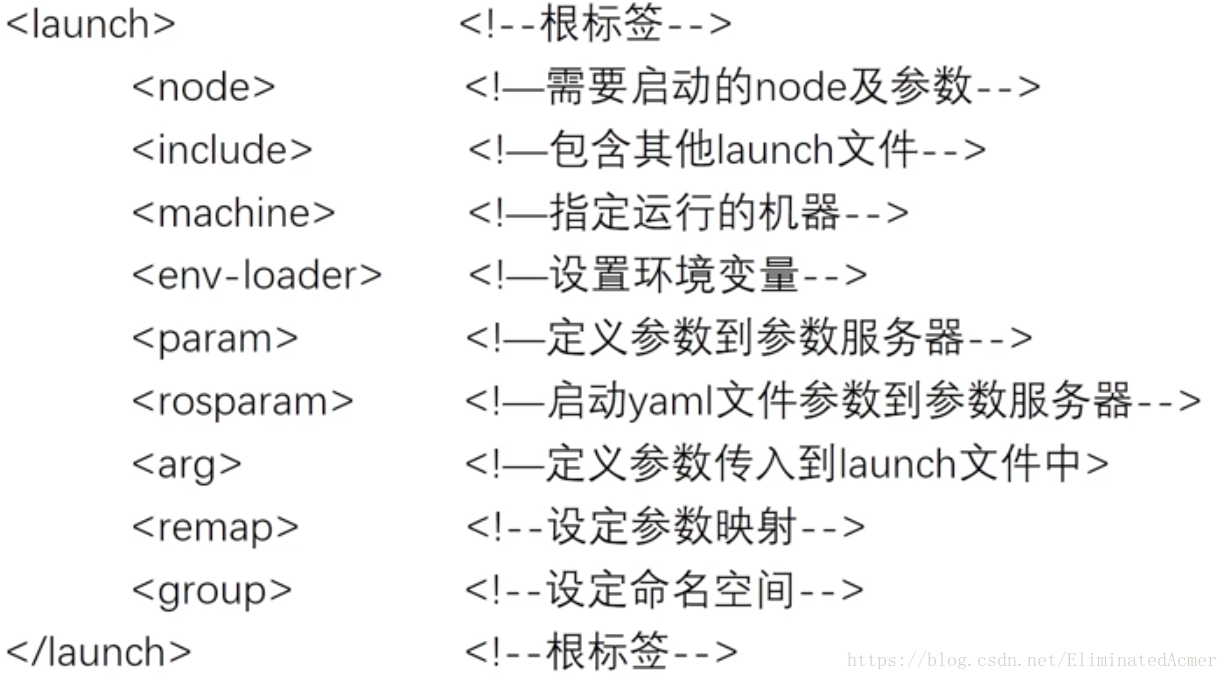
launch文件的格式是XML
下面先简单说一下各个标签、属性的意思:
多个组的节点
group 标签, 里面包含的是一个组内的定义,其属性
- ns(namespace)定义了组名,用于区分不同组
node 标签,里面包含的是一个节点的定义,属性:
- pkg说明该node所在pkg的名字
- type说明该node的名字
- name相当于为当前的node起一个别名(可以不起别名,默认值与type属性一致,但有时会造成歧义,比如在组内定义两个同类型的节点时会用同一个名字(因为都是同一个'type')
- output指定输出的位置
- args指定一些具体的参数,比如rosbag的play node需要指定文件路径,也可以为node里面的一些topic改名字(应该说是连接到新名字)
node 标签里面的子标签 remap,为该node里面订阅(或发布的topic) 重定向
上面文件在做什么?
首先分别在两个组中各自建立了一个turtlesim_node,然后只控制组1的节点,让组2的节点跟着组1的节点一起运动
以组1为例,group标签定义了一个组,组的名字在ns属性中给出 为"turtlesim1",该组内定义了一个node标签,说明组内只有一个节点,该节点是ros包(pkg属性)"turtlesim"里面的(type属性)"turtlesim_node"节点(的一个实例) ,该节点的名字(name属性)为"sim"
定义了两个组之后,又定义了一个mimic(模仿)节点,用于使组2的节点模仿组1的节点运动,通过remap将input(输入)话题重新映射到turtlesim1的turtle1话题,将output(输出)话题映射到turtlesim2,意味着将turtlesim1/turtle1 topic作为mimic节点的input topic,而turtlesim2/turtle1 topic作为mimic节点的output topic
关于remap标签的另一个例子
比如想同时用多张图片跑一套算法,可以为每张img定义一个组:
以组1为例,每个组定义两个节点:
- 一个节点专门发布数据(play rosbag)到某个话题上,另一个节点作为订阅者,订阅该话题来接收输入数据
<node pkg="rosbag" type="play" name="img_1" output="screen" args="--clock path_to_data /topic_a:=/group_1/topic_a /topic_b:=/group_1/topic_b ..... ">
</node>
<node pkg="algorithm_pkg" type="algorithm_node" name="algorithm_1" output="screen">
<remap from="/topic_a" to="/group_1/topic_a" >
</remap>
</node>
节点1:在args属性将原来topic名字映射成包含组名的新名字,意味着rosbag发布的topic名字变成 /group_1/topic_a 等等...
节点2:remap标签,将该节点订阅的话题重定向为新的名字,使其与在该组内发布数据的rosbag play节点所发布的话题名对应
为什么需要把原本的topic改为包含组名的?原本在算法节点中定义的订阅者,订阅的topic名字只是topic_a,由于输入图像不同,如果所有的输入图像都发布到topic_a这一个topic上,会造成混乱,因此应该一个输入图像对应一个话题名,同样地接收该输入图像(即运行算法的节点)所订阅的话题名也要随之更改。
launch文件的更多内容:
在roslaunch文件中使用变量
//TODO
ROS学习笔记(二) :使用roslaunch的更多相关文章
- ROS学习笔记二:ROS系统架构及概念
本文主要是了解ROS的系统架构.文件夹结构以及工作所需的核心文件. ROS系统架构主要被设计和划分为三部分,每一部分代表一个层级的概念:文件系统级(The filesystem level).计算图级 ...
- ROS学习笔记(二)
===================================================== QT工具箱sudo apt-get install ros-kinetic-rqtsudo ...
- ROS学习笔记8-rqt_console和roslaunch
本教程来自于:http://wiki.ros.org/ROS/Tutorials/UsingRqtconsoleRoslaunch rqt_console 和 rqt_logger_level 是ro ...
- ROS学习笔记二(创建ROS软件包)
catkin软件包的组成 一个软件包必须满足如下条件才能被称之为catkin软件包: 必须包含一个catkin编译文件package.xml(manifests文件),此文件包含了描述该软件包的重要信 ...
- Learning ROS for Robotics Programming Second Edition学习笔记(二) indigo tools
中文译著已经出版,详情请参考:http://blog.csdn.net/ZhangRelay/article/category/6506865 Learning ROS for Robotics Pr ...
- ROS学习笔记七:在ROS中使用USB摄像头
下面是一些USB摄像头的驱动(大多数摄像头都支持uvc标准): 1 使用软件库里的uvc-camera功能包 1.1 检查摄像头 lsusb ----------------------------- ...
- WPF的Binding学习笔记(二)
原文: http://www.cnblogs.com/pasoraku/archive/2012/10/25/2738428.htmlWPF的Binding学习笔记(二) 上次学了点点Binding的 ...
- AJax 学习笔记二(onreadystatechange的作用)
AJax 学习笔记二(onreadystatechange的作用) 当发送一个请求后,客户端无法确定什么时候会完成这个请求,所以需要用事件机制来捕获请求的状态XMLHttpRequest对象提供了on ...
- [Firefly引擎][学习笔记二][已完结]卡牌游戏开发模型的设计
源地址:http://bbs.9miao.com/thread-44603-1-1.html 在此补充一下Socket的验证机制:socket登陆验证.会采用session会话超时的机制做心跳接口验证 ...
随机推荐
- Install docker to Redhat 7
1) sudo yum-config-manager --add-repo https://download.docker.com/linux/centos/docker-ce.repo 2) s ...
- ESP8266 LUA脚本语言开发: 准备工作-为方便学习(统一使用本人编译的固件)
前言 注:为了咱后期统一起来,所以统一使用我编译的LUA固件 一,固件打开了SmartConfig / AirKiss 配网功能 二,打开了SSL 三,其它模块化程序 刷空固件 一,为了保证固件是干净 ...
- CF888G XOR-MST 最小异或生成树
CF888G XOR-MST 链接 CF888G 思路 trie上贪心,先左右两边连边,再用一条边的代价连起左右两颗树.因为内部的边一定比跨两棵树的边权笑,显然是对的. 代码自己瞎yy的.启发式合并 ...
- KMP——从入门到不会打题
KMP——从入门到不会打题 前言 如果你不了解哈希,建议先观看本蒟蒻的另一篇博客,对哈希有一定的理解 哈希大法吼 KMP算法,别名烤馍片或者看毛片,由烤馍片男子天团三位神犇同时发现的一种强大的单模 ...
- 第02组 Beta冲刺(3/4)
队名:十一个憨批 组长博客 作业博客 组长黄智 过去两天完成的任务:了解整个游戏的流程 GitHub签入记录 接下来的计划:继续完成游戏 还剩下哪些任务:完成游戏 燃尽图 遇到的困难:没有美术比较好的 ...
- Salesforce Lightning开发学习(四)重写新建/更新按钮
重写新建/更新按钮的原因是因为项目需要用户在新建数据时从接口对数据进行校验,保证数据的有效性,同时获取接口返回的部分数据完成信息填充,而Sales force的trigger仅支持@future方法异 ...
- [转载]3.4 UiPath键盘操作的介绍和使用
一.键盘操作的介绍 模拟用户使用键盘操作的一种行为: 例如使用发送热键(Sendhotkey),输入信息 (Typeinto)的操作 二.键盘操作在UiPath中的使用 1.打开设计器,在设计库中新建 ...
- 用欧拉计划学习Rust编程(第13~16题)
最近想学习Libra数字货币的MOVE语言,发现它是用Rust编写的,所以先补一下Rust的基础知识.学习了一段时间,发现Rust的学习曲线非常陡峭,不过仍有快速入门的办法. 学习任何一项技能最怕没有 ...
- .NET Core开发的iNeuOS物联网平台部署树霉派(raspbian),从网关到云端整体解决方案。助力2019中国.NET峰会。
2019 中国.NET 开发者峰会正式启动 目 录 1. 概述... 2 2. 树莓派硬件配置... 2 3. 软件信息... 3 4. Raspb ...
- python之函数filter、reduce
---恢复内容开始--- 一.filter函数 filter() 函数用于过滤序列,过滤掉不符合条件的元素,返回由符合条件元素组成的新列表. 该接收两个参数,第一个为函数,第二个为序列,对序列中每个元 ...