Ubuntu16.04中安装VirtualBox及简单配置
sudo apt-get -y install virtualbox
注:将该图表拖到桌面上即可

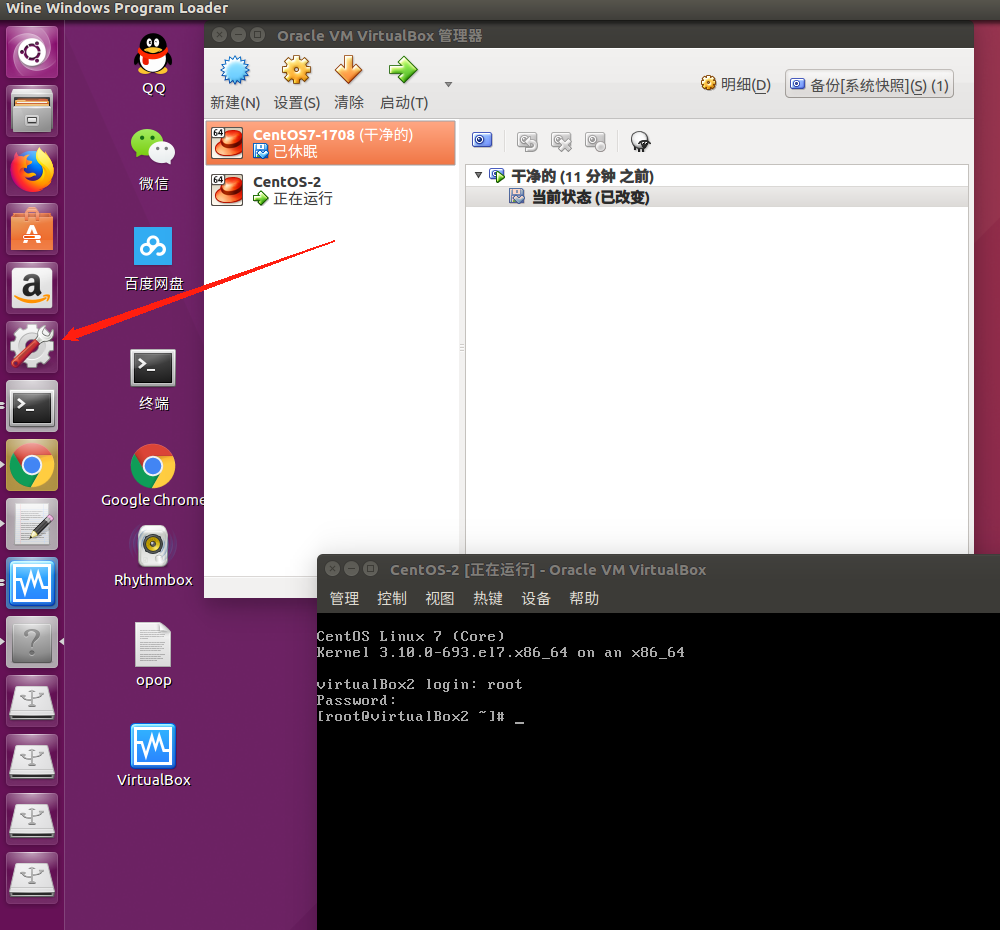
往下的过程都不变.....
将左边的菜单栏移动到下面
打开一个终端输入:gsettings set com.canonical.Unity.Launcher launcher-position Bottom

注:gsettings set com.canonical.Unity.Launcher launcher-position Bottom 中的Bottom是下面,Left是左面等,每一个方向的首字母必须是大写
安装搜狗输入法:
https://www.cnblogs.com/darklights/p/7722861.html
安装画图工具:
sudo apt-get -y install pinta

QQ群: 欢迎你的加入
该文章为原创,转载请注明原出处 谢谢合作
Ubuntu16.04中安装VirtualBox及简单配置的更多相关文章
- SLAM+语音机器人DIY系列:(二)ROS入门——3.在ubuntu16.04中安装ROS kinetic
摘要 ROS机器人操作系统在机器人应用领域很流行,依托代码开源和模块间协作等特性,给机器人开发者带来了很大的方便.我们的机器人“miiboo”中的大部分程序也采用ROS进行开发,所以本文就重点对ROS ...
- ubuntu16.04 python3 安装selenium及环境配置
环境 ubuntu16.04 python3 安装selenium sudo pip3 install seleium 默认安装完是支持firefox,但是更新得太慢对于较新的firefox已经不支持 ...
- Ubuntu16.04下安装virtualbox,配置及卸载
我是通过添加源的方式安装 将下边的命令添加到/etc/apt/source.list中 deb https://download.virtualbox.org/virtualbox/debian xe ...
- 如何在Ubuntu16.04 中安装Linux, Nginx, MySQL, PHP (LEMP 栈)
介绍 LEMP 栈是用来开发动态网页和web 应用程序的一系列软件集合,LEMP描述的是Linux操作系统,Nginx web 服务器,以及后端数据存储MySQL/MariaDB数据库和服务器端动态脚 ...
- ROS-1 : Ubuntu16.04中安装ROS Kinetic
1.安装 ROS Kinetic仅支持Wily(Ubuntu 15.10).Xenial( Ubuntu16.04)和Jessie(Debian 8)的debian软件包. 1.1 配置Ubuntu ...
- Ubuntu16.04中安装stlink驱动
系统环境: Vmware12, Ubuntu16.04 Stlink version:v1.4.0 一.安装依赖包: sudo apt-get install libusb-1.0 sudo apt- ...
- ubuntu16.04中安装下载工具uget+aria2并配置chrome (stable版)
1.安装uGut sudo apt-get install uget 2.安装aria2 sudo apt-get install arias 3.配置uGet默认下载插件为aria2 菜单栏依次打开 ...
- Docker - 在Ubuntu16.04中安装Docker CE
Get Docker for Ubuntu Check system version root@Ubuntu16:~# uname -a Linux Ubuntu16 4.8.0-36-generic ...
- 在ubuntu16.04中安装apache2+modsecurity以及自定义WAF规则详解
一.Modsecurity规则语法示例 SecRule是ModSecurity主要的指令,用于创建安全规则.其基本语法如下: SecRule VARIABLES OPERATOR [ACTIONS] ...
随机推荐
- python文件操作:文件处理与操作模式
一,文件处理的模式基本概念 #coding:utf-8 # 一: 文件处理的三个步骤 # 1. 打开文件拿到文件对象(文件对象====>操作系统打开文件====>硬盘) # f=open( ...
- Redis02——Redis单节点安装
Redis单节点安装 一.Redis的数据类型 string hash list set zset 二.安装 2.1.下载 wget http://download.redis.io/releases ...
- 配置LANMP环境(7)-- 配置nginx反向代理,与配置apache虚拟主机
一.配置nginx反向代理 1.修改配置文件 vim /etc/nginx/nginx.conf 在35行http下添加一下内容: include /data/nginx/vhosts/*.conf; ...
- Linux之vim文本编译器
Vim是从 vi 发展出来的一个文本编辑器.代码补完.编译及错误跳转等方便编程的功能特别丰富,在程序员中被广泛使用.和Emacs并列成为类Unix系统用户最喜欢的编辑器. [root@izwz98re ...
- 第六章 组件 67 使用ref获取DOM元素和组件引用
<!DOCTYPE html> <html lang="en"> <head> <meta charset="utf-8&quo ...
- sysbench0.4.12测试query_cache_size和query_cache_type
建议: query_cache_size和query_cache_type生产环境中关闭. (1)软件包下载地址: https://dev.mysql.com/downloads/benchmarks ...
- Java 转发和重定向的区别
转发是服务器行为,重定向是客户端行为 1.转发在服务器端完成的;重定向是在客户端完成的 2.转发的速度快;重定向速度慢 3.转发的是同一次请求;重定向是两次不同请求 4.转发不会执行转发后的代码;重定 ...
- mybatis使用@Insert @SelectKey 执行插入语句时获得主键自增长值(转)
@Insert(" insert into table(c1,c2) " + " values (#{c1},#{c2}) ") @SelectKey(resu ...
- Java-五种线程池,四种拒绝策略,三种阻塞队列(转)
Java-五种线程池,四种拒绝策略,三种阻塞队列 三种阻塞队列: BlockingQueue<Runnable> workQueue = null; workQueue = n ...
- asp.net大文件传输断点续传源码
HTML部分 <%@PageLanguage="C#"AutoEventWireup="true"CodeBehind="index.aspx. ...