Ubuntu16.04中安装VirtualBox及简单配置
sudo apt-get -y install virtualbox
注:将该图表拖到桌面上即可

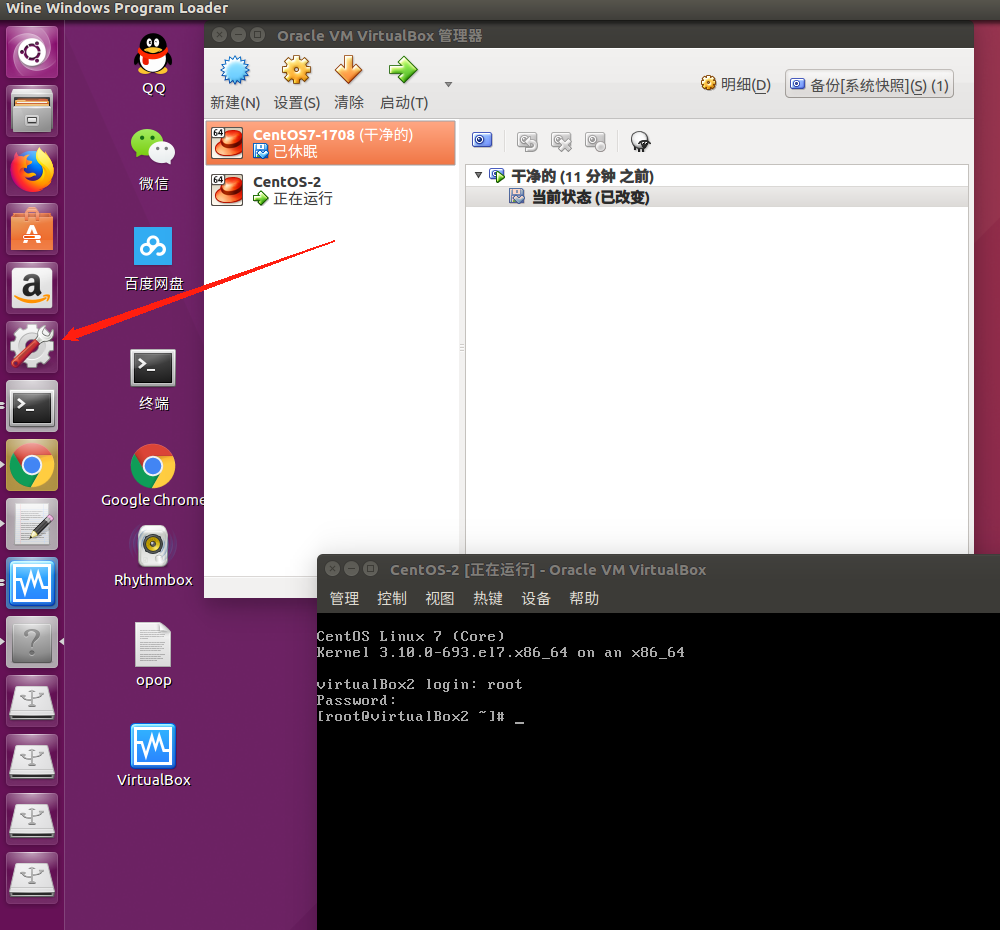
往下的过程都不变.....
将左边的菜单栏移动到下面
打开一个终端输入:gsettings set com.canonical.Unity.Launcher launcher-position Bottom

注:gsettings set com.canonical.Unity.Launcher launcher-position Bottom 中的Bottom是下面,Left是左面等,每一个方向的首字母必须是大写
安装搜狗输入法:
https://www.cnblogs.com/darklights/p/7722861.html
安装画图工具:
sudo apt-get -y install pinta

QQ群: 欢迎你的加入
该文章为原创,转载请注明原出处 谢谢合作
Ubuntu16.04中安装VirtualBox及简单配置的更多相关文章
- SLAM+语音机器人DIY系列:(二)ROS入门——3.在ubuntu16.04中安装ROS kinetic
摘要 ROS机器人操作系统在机器人应用领域很流行,依托代码开源和模块间协作等特性,给机器人开发者带来了很大的方便.我们的机器人“miiboo”中的大部分程序也采用ROS进行开发,所以本文就重点对ROS ...
- ubuntu16.04 python3 安装selenium及环境配置
环境 ubuntu16.04 python3 安装selenium sudo pip3 install seleium 默认安装完是支持firefox,但是更新得太慢对于较新的firefox已经不支持 ...
- Ubuntu16.04下安装virtualbox,配置及卸载
我是通过添加源的方式安装 将下边的命令添加到/etc/apt/source.list中 deb https://download.virtualbox.org/virtualbox/debian xe ...
- 如何在Ubuntu16.04 中安装Linux, Nginx, MySQL, PHP (LEMP 栈)
介绍 LEMP 栈是用来开发动态网页和web 应用程序的一系列软件集合,LEMP描述的是Linux操作系统,Nginx web 服务器,以及后端数据存储MySQL/MariaDB数据库和服务器端动态脚 ...
- ROS-1 : Ubuntu16.04中安装ROS Kinetic
1.安装 ROS Kinetic仅支持Wily(Ubuntu 15.10).Xenial( Ubuntu16.04)和Jessie(Debian 8)的debian软件包. 1.1 配置Ubuntu ...
- Ubuntu16.04中安装stlink驱动
系统环境: Vmware12, Ubuntu16.04 Stlink version:v1.4.0 一.安装依赖包: sudo apt-get install libusb-1.0 sudo apt- ...
- ubuntu16.04中安装下载工具uget+aria2并配置chrome (stable版)
1.安装uGut sudo apt-get install uget 2.安装aria2 sudo apt-get install arias 3.配置uGet默认下载插件为aria2 菜单栏依次打开 ...
- Docker - 在Ubuntu16.04中安装Docker CE
Get Docker for Ubuntu Check system version root@Ubuntu16:~# uname -a Linux Ubuntu16 4.8.0-36-generic ...
- 在ubuntu16.04中安装apache2+modsecurity以及自定义WAF规则详解
一.Modsecurity规则语法示例 SecRule是ModSecurity主要的指令,用于创建安全规则.其基本语法如下: SecRule VARIABLES OPERATOR [ACTIONS] ...
随机推荐
- Hadoop_07_HDFS的Java API 操作
通过Java API来访问HDFS 1.Windows上配置环境变量 解压Hadoop,然后把Hadoop的根目录配置到HADOOP_HOME环境变量里面 然后把HADOOP_HOME/lib和HAD ...
- Python3.8新特性-- 海象操作符
“理论联系实惠,密切联系领导,表扬和自我表扬”——我就是老司机,曾经写文章教各位怎么打拼职场的老司机. 不记得没关系,只需要知道:有这么一位老司机, 穿上西装带大家打拼职场! 操起键盘带大家打磨技术! ...
- 【u-boot】u-boot中initf_dm()函数执行流程(转)
前部分设备模型初始化 为了便于阅读,删掉部分代码,只留关键的过程: static int initf_dm(void){ int ret; ret = dm_init_and_scan(t ...
- docker安装rocketmq
一.单机部署 1.拉取镜像:foxiswho/rocketmq:server cabel/rocketmq:broker styletang/rocketmq-console-ng 2.创建目录:d ...
- static和assets的区别
assets和static两个都是用于存放静态资源文件. 放在static中的文件不会进行构建编译处理,也就不会压缩体积,在打包时效率会更高,但体积更大在服务器中就会占据更大的空间 放在assets中 ...
- 什么是SYN Flood攻击?
SYN Flood (SYN洪水) 是种典型的DoS (Denial of Service,拒绝服务) 攻击.效果就是服务器TCP连接资源耗尽,停止响应正常的TCP连接请求. 说到原理,还得从TCP如 ...
- 【BZOJ4671】 异或图
Description 定义两个结点数相同的图 G1 与图 G2 的异或为一个新的图 G, 其中如果 (u, v) 在 G1 与 G2 中的出现次数之和为 1, 那么边 (u, v) 在 G 中, 否 ...
- Python3:Collatz 序列(考拉咨猜想)
编写一个名为collatz()的函数,它有一个名为number的参数: 如果参数是偶数,那么collatz()就打印出number//2,并返回该值: 如果number是奇数,那么collatz()就 ...
- BZOJ 4388 [JOI2012春季合宿]Invitation (线段树、二叉堆、最小生成树)
题目链接 https://www.lydsy.com/JudgeOnline/problem.php?id=4388 题解 模拟Prim算法? 原题所述的过程就是Prim算法求最大生成树的过程.于是我 ...
- vue-property-decorator知识梳理
仓库地址: /* npm 仓库地址 */ // https://www.npmjs.com/package/vue-property-decorator /* github地址 */ // https ...