模糊控制——(3)模糊自适应整定PID控制
1、原理
这种控制必须精确地确定对象模型,首先将操作人员(专家)长期实践积累的经验知识用控制规则模型化,然后运用推理便可对PID参数实现最佳调整。
自适应模糊PID控制器以误差e和误差变化ec作为输入,可以满足不同时刻的e和ec对PID参数自整定的要求。利用模糊控制规则在线对PID参数进行修改,便构成了自适应模糊PID控制器,其结构如图4-17所示。
离散PID控制算法为:

式中, k为采样序号,T 为采样时间。

PID参数模糊自整定是找出PID三个参数 Kp, Ki, Kd 与e和ec之间的模糊关系,在运行中通过不断检测e和ec,根据模糊控制原理来对3个参数进行在线修改,以满足不同e和ec时对控制参数的不同要求,而使被控对象有良好的动、静态性能。
从系统的稳定性、响应速度、超调量和稳态精度等各方面来考虑, Kp, Ki, Kd的作用如下:
(1)比例系数Kp的作用是加快系统的响应速度,提高系统的调节精度。 Kp越大,系统的响应速度越快,系统的调节精度越高,但易产生超调,甚至会导致系统不稳定。 Kp取值过小,则会降低调节精度,使响应速度缓慢,从而延长调节时间,使系统静态、动态特性变坏。
(2)积分作用系数 Ki的作用是消除系统的稳态误差。 Ki越大,系统的静态误差消除越快,但Ki过大,在响应过程的初期会产生积分饱和现象,从而引起响应过程的较大超调。若 Ki过小,将使系统静态误差难以消除,影响系统的调节精度。
(3)微分作用系数Kd的作用是改善系统的动态特性,其作用主要是在响应过程中抑制偏差向任何方向的变化,对偏差变化进行提前预报。但Kd过大,会使响应过程提前制动,从而延长调节时间,而且会降低系统的抗干扰性能。
以PI参数整定为例,必须考虑到在不同时刻两个参数的作用以及相互之间的互联关系。模糊自整定PI是在PI算法的基础上,通过计算当前系统误差e和误差变化率ec,利用模糊规则进行模糊推理,查询模糊矩阵表进行参数调整。
模糊控制设计的核心是总结工程设计人员的技术知识和实际操作经验,建立合适的模糊规则表,得到针对Kp, Ki两个参数分别整定的模糊控制表。
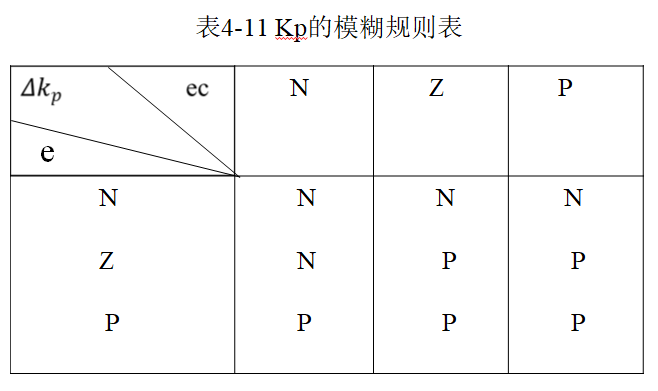
(1) Kp的模糊整定规则表(见表4-11)
(2)Ki的模糊整定规则表(见表4-12)

Kp,Ki的模糊控制规则表建立好后,可根据如下方法进行自适应校正。将系统误差e和误差变化率ec变化范围定义为模糊集上的论域。
其模糊子集为 e,ec={N,O,P},子集中元素分别代表负,零,正。设e、ec和两个系数均服从正态分布,因此可得出各模糊子集的隶属度,根据各模糊子集的隶属度赋值表和各参数模糊控制模型,应用模糊合成推理设计PI参数的模糊矩阵表,查出修正参数代入下式计算。

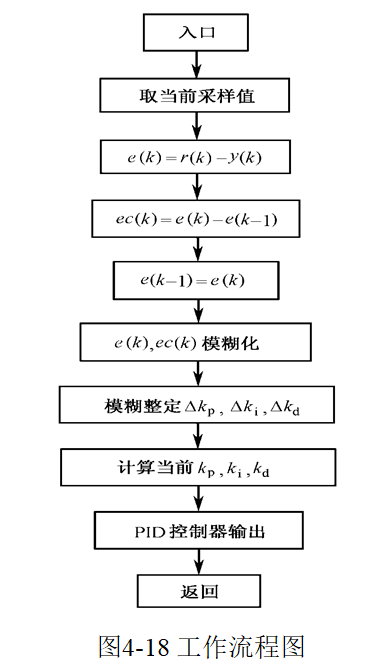
在线运行过程中,控制系统通过对模糊逻辑规则的结果处理、查表和运 算,完成对PID参数的在线自校正。其工作流程图如图4-18所示。
模糊控制——(3)模糊自适应整定PID控制的更多相关文章
- PID控制及整定算法
一.PID控制算法 PID是比例.积分.微分的简称,PID控制的难点不是编程,而是控制器的参数整定.参数整定的关键是正确地理解各参数的物理意义,PID 控制的原理可以用人对炉温的手动控制来理解.阅读本 ...
- 通俗理解 模糊自适应PID
模糊自适应PID算法就是在经典的PID的基础上添加模糊控制规则库,建立这个库的目的就是算法能够自己来进行改变P.I.D的值. 就拿温度的上升过程控制来说,刚开始的时候,希望温度能够快速的升到终点温度, ...
- SLAM+语音机器人DIY系列:(四)差分底盘设计——5.底盘PID控制参数整定
摘要 运动底盘是移动机器人的重要组成部分,不像激光雷达.IMU.麦克风.音响.摄像头这些通用部件可以直接买到,很难买到通用的底盘.一方面是因为底盘的尺寸结构和参数是要与具体机器人匹配的:另一方面是因为 ...
- PID控制最通俗的解释与PID参数的整定方法
转自->这里 PID是比例.积分.微分的简称,PID控制的难点不是编程,而是控制器的参数整定.参数整定的关键是正确地理解各参数的物理意义,PID控制的原理可以用人对炉温的手动控制来理解.阅读本文 ...
- STM32L476应用开发之七:流量的PID控制
在气体分析仪使用过程中,为了力求分析结果的准确性,一般要求通过的气体流量尽可能的稳定.为了保证流量控制的稳定,我们采用PID调节来控制气路阀门的开度. 1.硬件设计 我们采用的流量计为气体质量流量计, ...
- 经典PID控制及应用体会总结
经典PID控制及应用体会总结 PID控制原理 PID是一种线性控制器,它根据给定值rin(t)与实际输出值yout(t)构成控制方案: 重点关注相关算法是如何对偏差进行处理的: PID控制器各校正环节 ...
- STM32—PID控制在直流电机中的应用
文章目录 一.PID控制算法 1.什么是PID 2.PID系数的理解 Ⅰ.比例(P)部分 Ⅱ.积分(I)部分 Ⅲ.微分(D)部分 3.PID的数字化处理 二.位置闭环控制 三.速度闭环控制 一.PID ...
- 【iCore3应用开发平台】发布 iCore3 应用开发平台PID控制代码
说明:1.本代码包包含FPGA和STM32F407两部分内容2.FPGA工程为出厂代码FPGA工程,版本为REV43.STM32F407为只含PID控制的ARM工程4.在使用风扇过程中,请勿将手伸入扇 ...
- 两轮自平衡小车双闭环PID控制设计
两轮自平衡小车的研究意义 ...
随机推荐
- Ubuntu使用心得
因为开发学习需要,也接触了一些Ubuntu系统,玩崩了两次系统之后,也学到了一些东西. -------------------------------------------------------- ...
- CPU执行程序的原理(简化过程)
前言 看了网上的一些描述CPU执行程序的过程,发现他们涉及到的内容太多了,恨不能把整个CPU的底层结构都拿出来说,这对计算机理论知识匮乏的新人甚至是一些老人都是非常不友好的.这个问题也是当初拦在我面前 ...
- 【学习笔记】--- 老男孩学Python,day10, 函数, 动态参数 命名空间\作用域 global nonlocal
1. 动态参数 位置参数的动态参数: *args 关键字参数的动态参数 : **kwargs 顺序:位置---*args---默认值---**kwargs 在形参上*聚合, **聚合 在实参上*打散, ...
- [h5+api]移动app开发用到的微信好友,朋友圈,qq好友,新浪微博分享合集
适用H5+环境,能够使用plus方法的移动app中 /** * Created by HBuilder. * User: tyx * Date: 2018-11-21 * Time: 17:28:51 ...
- Oracle Sequence Cache 参数说明
转自 http://blog.csdn.net/tianlesoftware/article/details/5995051 之前整理的一篇文章: ORACLE SEQUENCE 介绍 http:// ...
- 通过Places API Web Service获取兴趣点数据
实验将爬取新加坡地区的银行POI数据 数据库采用mongodb,请自行安装,同时申请google的key 直接上代码 #coding=utf-8 import urllib import json i ...
- 回归JavaScript基础(九)
主题:理解对象,创建对象. 小明是一名程序猿,也是一条单身狗!他常常自嘲:每天都会有很多对象,但却没有女朋友! 多么痛的领悟.哈哈,目前比较流行的编程语言都是面向对象的语言(Object-Orient ...
- Swiper-轮播图。
Swiper(Swiper master)是目前应用较广泛的移动端网页触摸内容滑动js插件,可以用来做轮播和滑动. 初始化 <!DOCTYPE html> <html> < ...
- Apache服务器如何通过.htaccess文件设置防盗链?
Apache服务器通过.htaccess文件设置防盗链 用户经常面对的一个问题就是服务器的流量问题,而站点文件被盗链是其中最为主要的部分.所谓盗链,是指其他网站直接链接我们网站上的文件,一般来说,盗链 ...
- SQLSERVER的 筛选索引(Fiter Index)
fiter index(筛选索引)是SQL Server的一项功能,可使此数据库与众不同. 筛选索引的概念 SQL Server中常用的索引是一种物理结构,它包含来自所有行的一组选定列的值 在一张桌子 ...