OpenCV-Python 姿态估计 | 五十
目标
在本章中
- 我们将学习利用calib3d模块在图像中创建一些3D效果。
基础
这将是一小部分。在上一次相机校准的会话中,你发现了相机矩阵,失真系数等。给定图案图像,我们可以利用以上信息来计算其姿势或物体在空间中的位置,例如其旋转方式, 对于平面物体,我们可以假设Z = 0,这样,问题就变成了如何将相机放置在空间中以查看图案图像。 因此,如果我们知道对象在空间中的位置,则可以在其中绘制一些2D图以模拟3D效果。 让我们看看如何做。
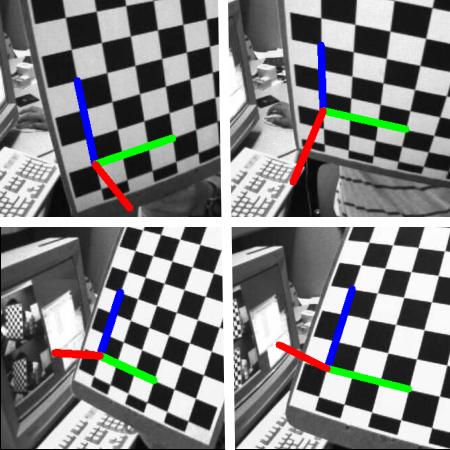
我们的问题是,我们想在棋盘的第一个角上绘制3D坐标轴(X,Y,Z)。 X轴为蓝色,Y轴为绿色,Z轴为红色。 因此,实际上Z轴应该感觉像它垂直于我们的棋盘平面。
首先,让我们从先前的校准结果中加载相机矩阵和失真系数。
import numpy as np
import cv2 as cv
import glob
# 加载先前保存的数据
with np.load('B.npz') as X:
mtx, dist, _, _ = [X[i] for i in ('mtx','dist','rvecs','tvecs')]
现在让我们创建一个函数,绘制,该函数将棋盘上的角(使用cv.findChessboardCorners()获得)和轴点绘制为3D轴。
def draw(img, corners, imgpts):
corner = tuple(corners[0].ravel())
img = cv.line(img, corner, tuple(imgpts[0].ravel()), (255,0,0), 5)
img = cv.line(img, corner, tuple(imgpts[1].ravel()), (0,255,0), 5)
img = cv.line(img, corner, tuple(imgpts[2].ravel()), (0,0,255), 5)
return img
然后,与前面的情况一样,我们创建终止条件,对象点(棋盘上角的3D点)和轴点。 轴点是3D空间中用于绘制轴的点。 我们绘制长度为3的轴(由于我们根据该棋盘尺寸进行了校准,因此单位将以国际象棋正方形的尺寸为单位)。因此我们的X轴从(0,0,0)绘制为(3,0,0),因此对于Y轴。 对于Z轴,从(0,0,0)绘制为(0,0,-3)。 负号表示它被拉向相机。
criteria = (cv.TERM_CRITERIA_EPS + cv.TERM_CRITERIA_MAX_ITER, 30, 0.001)
objp = np.zeros((6*7,3), np.float32)
objp[:,:2] = np.mgrid[0:7,0:6].T.reshape(-1,2)
axis = np.float32([[3,0,0], [0,3,0], [0,0,-3]]).reshape(-1,3)
现在,像往常一样,我们加载每个图像。搜索7x6网格。如果找到,我们将使用子角像素对其进行优化。然后使用函数cv.solvePnPRansac()计算旋转和平移。一旦有了这些变换矩阵,就可以使用它们将轴点投影到图像平面上。简而言之,我们在图像平面上找到与3D空间中(3,0,0),(0,3,0),(0,0,3)中的每一个相对应的点。一旦获得它们,就可以使用draw()函数从第一个角到这些点中的每个点绘制线条。完毕!!!
for fname in glob.glob('left*.jpg'):
img = cv.imread(fname)
gray = cv.cvtColor(img,cv.COLOR_BGR2GRAY)
ret, corners = cv.findChessboardCorners(gray, (7,6),None)
if ret == True:
corners2 = cv.cornerSubPix(gray,corners,(11,11),(-1,-1),criteria)
# 找到旋转和平移矢量。
ret,rvecs, tvecs = cv.solvePnP(objp, corners2, mtx, dist)
# 将3D点投影到图像平面
imgpts, jac = cv.projectPoints(axis, rvecs, tvecs, mtx, dist)
img = draw(img,corners2,imgpts)
cv.imshow('img',img)
k = cv.waitKey(0) & 0xFF
if k == ord('s'):
cv.imwrite(fname[:6]+'.png', img)
cv.destroyAllWindows()
请参阅下面的一些结果。请注意,每个轴长3个long单位。
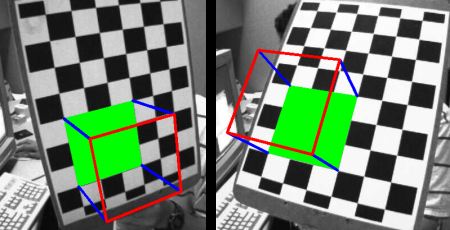
绘制立方体
如果要绘制立方体,请如下修改draw()函数和轴点。
修改后的draw()函数:
def draw(img, corners, imgpts):
imgpts = np.int32(imgpts).reshape(-1,2)
# 用绿色绘制底层
img = cv.drawContours(img, [imgpts[:4]],-1,(0,255,0),-3)
# 用蓝色绘制高
for i,j in zip(range(4),range(4,8)):
img = cv.line(img, tuple(imgpts[i]), tuple(imgpts[j]),(255),3)
# 用红色绘制顶层
img = cv.drawContours(img, [imgpts[4:]],-1,(0,0,255),3)
return img
修改的轴点。它们是3D空间中多维数据集的8个角:
axis = np.float32([[0,0,0], [0,3,0], [3,3,0], [3,0,0], [0,0,-3],[0,3,-3],[3,3,-3],[3,0,-3] ])
查看以下结果:
如果您对图形,增强现实等感兴趣,则可以使用OpenGL渲染更复杂的图形。
欢迎关注磐创博客资源汇总站:
http://docs.panchuang.net/
欢迎关注PyTorch官方中文教程站:
http://pytorch.panchuang.net/
OpenCV中文官方文档:
http://woshicver.com/
OpenCV-Python 姿态估计 | 五十的更多相关文章
- OpenCV开发笔记(五十五):红胖子8分钟带你深入了解Haar、LBP特征以及级联分类器识别过程(图文并茂+浅显易懂+程序源码)
若该文为原创文章,未经允许不得转载原博主博客地址:https://blog.csdn.net/qq21497936原博主博客导航:https://blog.csdn.net/qq21497936/ar ...
- OpenCV开发笔记(五十六):红胖子8分钟带你深入了解多种图形拟合逼近轮廓(图文并茂+浅显易懂+程序源码)
若该文为原创文章,未经允许不得转载原博主博客地址:https://blog.csdn.net/qq21497936原博主博客导航:https://blog.csdn.net/qq21497936/ar ...
- python学习第五十四天hashlib模块的使用
hash算法 hash也做散列,也称为哈希,主要用于信息安全领域中加密算法,hash就是找一种数据内容和数据存放地址直接的映射关系. md5算法 md5讯息算法,广泛使用密码函数 md5算法的特点 1 ...
- python学习第五十天shutil模块的用法
什么shutil模块,就是对高级的文件,文件夹,压缩包进行处理的模块,下面简单讲述其用法. 文件和文件夹的操作 拷贝文件内容 import shutil shutil.copyfileobj(open ...
- 第三百五十八节,Python分布式爬虫打造搜索引擎Scrapy精讲—将bloomfilter(布隆过滤器)集成到scrapy-redis中
第三百五十八节,Python分布式爬虫打造搜索引擎Scrapy精讲—将bloomfilter(布隆过滤器)集成到scrapy-redis中,判断URL是否重复 布隆过滤器(Bloom Filter)详 ...
- 第三百五十九节,Python分布式爬虫打造搜索引擎Scrapy精讲—elasticsearch(搜索引擎)介绍以及安装
第三百五十九节,Python分布式爬虫打造搜索引擎Scrapy精讲—elasticsearch(搜索引擎)介绍以及安装 elasticsearch(搜索引擎)介绍 ElasticSearch是一个基于 ...
- 第三百五十六节,Python分布式爬虫打造搜索引擎Scrapy精讲—scrapy分布式爬虫要点
第三百五十六节,Python分布式爬虫打造搜索引擎Scrapy精讲—scrapy分布式爬虫要点 1.分布式爬虫原理 2.分布式爬虫优点 3.分布式爬虫需要解决的问题
- 第三百五十五节,Python分布式爬虫打造搜索引擎Scrapy精讲—scrapy信号详解
第三百五十五节,Python分布式爬虫打造搜索引擎Scrapy精讲—scrapy信号详解 信号一般使用信号分发器dispatcher.connect(),来设置信号,和信号触发函数,当捕获到信号时执行 ...
- 第三百五十四节,Python分布式爬虫打造搜索引擎Scrapy精讲—数据收集(Stats Collection)
第三百五十四节,Python分布式爬虫打造搜索引擎Scrapy精讲—数据收集(Stats Collection) Scrapy提供了方便的收集数据的机制.数据以key/value方式存储,值大多是计数 ...
随机推荐
- 用pyqt5简单实现Mqtt调试助手-初学python
最近在学习pyqt5,因为我们是做远程物联网设备的,所以就做个mqtt调试助手来练手.第一次做这种程序,没有加异常处理,会有很多不足,欢迎留言拍砖,直接上代码了 这个是程序入口, # 使用前先安装py ...
- Redis(3)——分布式锁深入探究
一.分布式锁简介 锁 是一种用来解决多个执行线程 访问共享资源 错误或数据不一致问题的工具. 如果 把一台服务器比作一个房子,那么 线程就好比里面的住户,当他们想要共同访问一个共享资源,例如厕所的时候 ...
- bootstrap简介与入门
bootstrap前端框架 1.概念:一个前端开发的框架,Bootstrap,来自 Twitter,是目前很受欢迎的前端框架.Bootstrap 是基于 HTML.CSS.JavaScript 的,它 ...
- ZOJ 4109 Welcome Party
题目链接:(https://zoj.pintia.cn/problem-sets/91827364500/problems/91827370504)(https://vjudge.net/proble ...
- @开发者,快来申请你的工业级NXP内核物联网开发板
米尔工业级NXP开发板试用活动(MYD-C8MMX) 不久前 米尔推出了新一代高性价比核心板之王 MYC-C8MMX核心板及开发板 获得众多客户热烈反馈 这一次 我们给各位带来福利 i.MX8M mi ...
- 7-44 jmu-python-区间数之和 (10 分)
输入一个区间,计算里面能被3整除或被5整除的数和. 输入格式: 每行输入一个数据,代表区间左界和右界.区间包含左界和右界.数据必须是整数. 输出格式: 满足条件数和. 输入样例: 2 10 输出样例: ...
- Python读取和写入文件
1 从文件中读取数据 1.1 读取整个文件 创建名为test的txt文本文件,添加内容如下所示: 123456789023456789013456789012 实现代码: with open('tes ...
- Python知识点 - 获取当前系统主机名、用户名、用户目录。
代码示例: import socket, getpass, os # 获取当前系统主机名 host_name = socket.gethostname() # 获取当前系统用户名 user_name ...
- 『配置』服务器搭建 Office Online Server2016 实现文档预览
博主有话说:这个过程我遇到了很多错误,所以出了一个错误整理文章,所以当你在配置过程中遇到了问题,可以先去这篇文章里找找!加油! 先打开我吧:https://www.cnblogs.com/pukua/ ...
- python3编写程序,根据输入的行列数值,生成相应的矩阵(其中元素为随机数)。
代码如下: import random n = int(input("请输入行:")) m = int(input("请输入列:")) x = y = 0 wh ...