opencv学习之路(37)、运动物体检测(二)
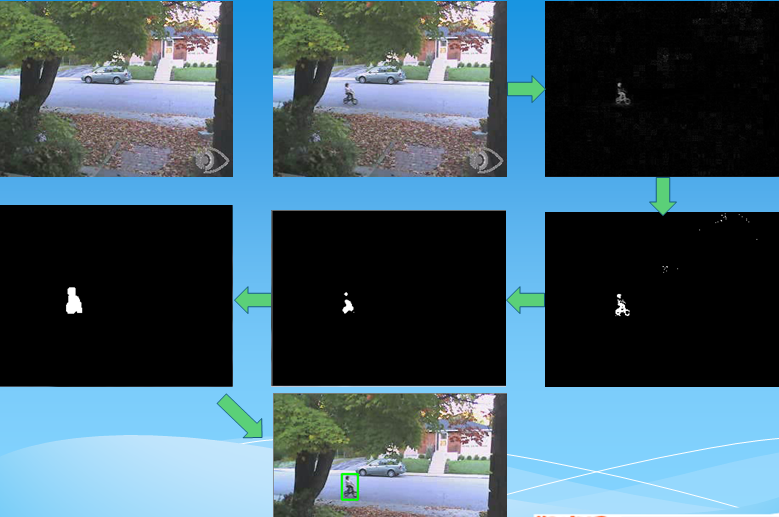
一、运动物体轮廓椭圆拟合及中心
#include "opencv2/opencv.hpp"
#include<iostream>
using namespace std;
using namespace cv; Mat MoveDetect(Mat frame1, Mat frame2)
{
Mat result = frame2.clone();
Mat gray1, gray2;
cvtColor(frame1, gray1, CV_BGR2GRAY);
cvtColor(frame2, gray2, CV_BGR2GRAY); Mat diff;
absdiff(gray1, gray2, diff);
imshow("absdiss", diff);
threshold(diff, diff, , , CV_THRESH_BINARY);
imshow("threshold", diff); Mat element = getStructuringElement(MORPH_RECT, Size(, ));
Mat element2 = getStructuringElement(MORPH_RECT, Size(, ));
erode(diff, diff, element);
imshow("erode", diff); dilate(diff, diff, element2);
imshow("dilate", diff); vector<vector<Point>> contours;
vector<Vec4i> hierarcy;
//画椭圆及中心
findContours(diff, contours, hierarcy, CV_RETR_EXTERNAL, CV_CHAIN_APPROX_NONE);
cout<<"num="<<contours.size()<<endl;
vector<RotatedRect> box(contours.size());
for(int i=; i<contours.size(); i++)
{
box[i] = fitEllipse(Mat(contours[i]));
ellipse(result, box[i], Scalar(, , ), , );
circle(result, box[i].center, , Scalar(, , ), -, );
}
return result;
} void main()
{
VideoCapture cap("E://man.avi");
if(!cap.isOpened()) //检查打开是否成功
return;
Mat frame;
Mat result;
Mat background;
int count=;
while()
{
cap>>frame;
if(frame.empty())
break;
else{
count++;
if(count==)
background = frame.clone(); //提取第一帧为背景帧
imshow("video", frame);
result = MoveDetect(background, frame);
imshow("result", result);
if(waitKey()==)
break;
}
}
cap.release();
}
和上一篇文章代码的不同点在30-38行,天台行人视频适合用背景减法处理,自行车视频适合帧差法处理

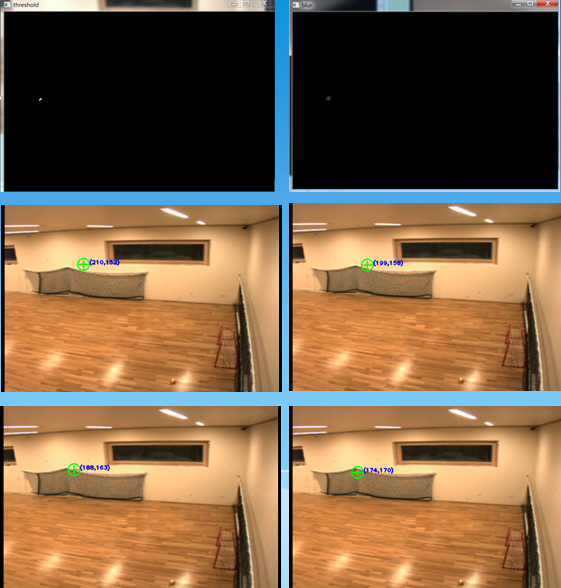
二、滤波方法去除噪声
上篇文章中使用腐蚀膨胀消除噪声,这次使用滤波方法去除噪声
中值滤波
//二值化后使用中值滤波+膨胀
Mat element = getStructuringElement(MORPH_RECT, Size(, ));
medianBlur(diff, diff, );//中值滤波
imshow("medianBlur", diff);
dilate(diff, diff, element);
imshow("dilate", diff);
均值滤波
#include "opencv2/opencv.hpp"
#include<iostream>
using namespace std;
using namespace cv; //int to string helper function
string intToString(int number)
{
stringstream ss;
ss << number;
return ss.str();
} Mat MoveDetect(Mat background, Mat img)
{
Mat result = img.clone();
Mat gray1, gray2;
cvtColor(background, gray1, CV_BGR2GRAY);
cvtColor(img, gray2, CV_BGR2GRAY); Mat diff;
absdiff(gray1, gray2, diff);
threshold(diff, diff, , , CV_THRESH_BINARY);
imshow("threshold", diff);
blur(diff, diff, Size(, ));//均值滤波
imshow("blur", diff); vector<vector<Point>> contours;
vector<Vec4i> hierarcy;
findContours(diff, contours, hierarcy, CV_RETR_EXTERNAL, CHAIN_APPROX_NONE); //查找轮廓
vector<Rect> boundRect(contours.size()); //定义外接矩形集合
//drawContours(img2, contours, -1, Scalar(0, 0, 255), 1, 8); //绘制轮廓
int x0=, y0=, w0=, h0=;
for(int i=; i<contours.size(); i++)
{
boundRect[i] = boundingRect((Mat)contours[i]); //查找每个轮廓的外接矩形 x0 = boundRect[i].x; //获得第i个外接矩形的左上角的x坐标
y0 = boundRect[i].y; //获得第i个外接矩形的左上角的y坐标
w0 = boundRect[i].width; //获得第i个外接矩形的宽度
h0 = boundRect[i].height; //获得第i个外接矩形的高度
//rectangle(result, Point(x0, y0), Point(x0+w0, y0+h0), Scalar(0, 255, 0), 2, 8); //绘制第i个外接矩形
circle(result, Point(x0+w0/, y0+h0/), , Scalar(, , ), , );
line(result, Point(x0+w0/-, y0+h0/), Point(x0+w0/+, y0+h0/), Scalar(, , ), , );
line(result, Point(x0+w0/, y0+h0/-), Point(x0+w0/, y0+h0/+), Scalar(, , ), , );
putText(result,"(" + intToString(x0+w0/)+","+intToString(y0+h0/)+")",Point(x0+w0/+, y0+h0/), , ,Scalar(,,),);
}
return result;
} void main()
{
VideoCapture cap("E://ball.avi");
if(!cap.isOpened()) //检查打开是否成功
return;
Mat frame;
Mat result;
Mat background;
int count=;
while()
{
cap>>frame;
if(frame.empty())
break;
else{
count++;
if(count==)
background = frame.clone(); //提取第一帧为背景帧
imshow("video", frame);
result = MoveDetect(background, frame);
imshow("result", result);
if(waitKey()==)
break;
}
}
cap.release();
}
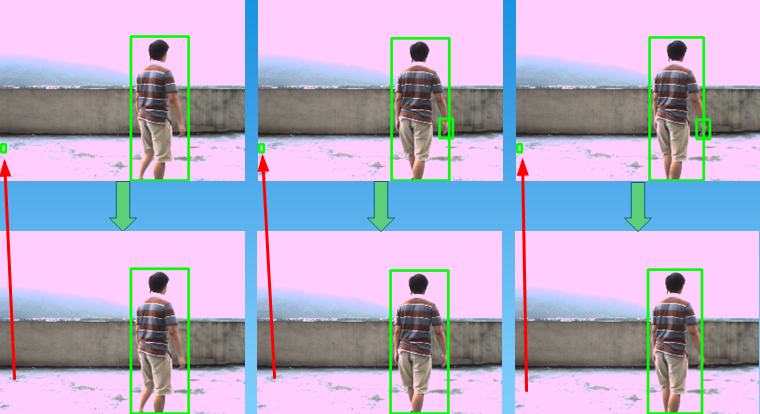
三、轮廓筛选去除噪声(效果挺好的)
//其余代码相同
int x0=, y0=, w0=, h0=;
for(int i=; i<contours.size(); i++)
{
boundRect[i] = boundingRect((Mat)contours[i]); //查找每个轮廓的外接矩形 x0 = boundRect[i].x; //获得第i个外接矩形的左上角的x坐标
y0 = boundRect[i].y; //获得第i个外接矩形的左上角的y坐标
w0 = boundRect[i].width; //获得第i个外接矩形的宽度
h0 = boundRect[i].height; //获得第i个外接矩形的高度
//筛选
if(w0> && h0>)
rectangle(result, Point(x0, y0), Point(x0+w0, y0+h0), Scalar(, , ), , ); //绘制第i个外接矩形
}
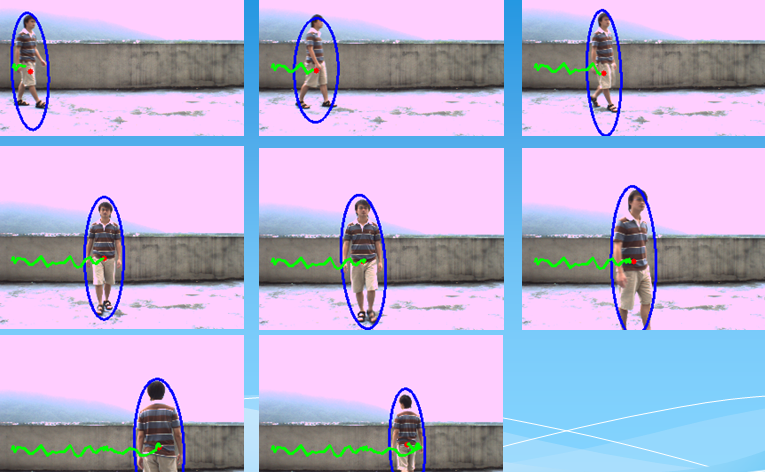
四、运动轨迹绘制
#include "opencv2/opencv.hpp"
#include<iostream>
using namespace std;
using namespace cv; Point center;
Point fre_center;//存储前一帧中心坐标
int num=;
vector<Point> points; Mat MoveDetect(Mat background, Mat img)
{
Mat result = img.clone();
Mat gray1, gray2;
cvtColor(background, gray1, CV_BGR2GRAY);
cvtColor(img, gray2, CV_BGR2GRAY); Mat diff;
absdiff(gray1, gray2, diff);
imshow("absdiss", diff);
threshold(diff, diff, , , CV_THRESH_BINARY);
imshow("threshold", diff); Mat element = getStructuringElement(MORPH_RECT, Size(, ));
Mat element2 = getStructuringElement(MORPH_RECT, Size(, ));
erode(diff, diff, element);
imshow("erode", diff);
dilate(diff, diff, element2);
imshow("dilate", diff); vector<vector<Point>> contours;
vector<Vec4i> hierarcy;
findContours(diff, contours, hierarcy, CV_RETR_EXTERNAL, CHAIN_APPROX_NONE); //查找轮廓
vector<Rect> boundRect(contours.size()); //定义外接矩形集合
//drawContours(img2, contours, -1, Scalar(0, 0, 255), 1, 8); //绘制轮廓
vector<RotatedRect> box(contours.size());
int x0=, y0=, w0=, h0=;
for(int i=; i<contours.size(); i++)
{
boundRect[i] = boundingRect((Mat)contours[i]); //查找每个轮廓的外接矩形 x0 = boundRect[i].x; //获得第i个外接矩形的左上角的x坐标
y0 = boundRect[i].y; //获得第i个外接矩形的左上角的y坐标
w0 = boundRect[i].width; //获得第i个外接矩形的宽度
h0 = boundRect[i].height; //获得第i个外接矩形的高度
if(w0> && h0>)//筛选长宽大于30的轮廓
{
num++;
//rectangle(result, Point(x0, y0), Point(x0+w0, y0+h0), Scalar(0, 255, 0), 2, 8); //绘制第i个外接矩形
box[i] = fitEllipse(Mat(contours[i]));
ellipse(result, box[i], Scalar(, , ), , ); //椭圆轮廓
circle(result, box[i].center, , Scalar(, , ), -, ); //画中心
center = box[i].center;//当前帧的中心坐标
points.push_back(center);//中心塞进points向量集
if(num !=)
{
//line(result, fre_center, center, Scalar(255, 0, 0), 2, 8);
for(int j=; j<points.size()-; j++)
line(result, points[j], points[j+], Scalar(, , ), , );
}
//fre_center = center;
}
}
return result;
} void main()
{
VideoCapture cap("E://man.avi");
if(!cap.isOpened()) //检查打开是否成功
return;
Mat frame;
Mat background;
Mat result;
int count=;
while()
{
cap>>frame;
if(!frame.empty())
{
count++;
if(count==)
background = frame.clone(); //提取第一帧为背景帧
imshow("video", frame);
result = MoveDetect(background, frame);
imshow("result", result);
if(waitKey()==)
break;
}
else
break;
}
cap.release();
}
五、车辆数量检测
1.帧差法检测运动目标
2.预处理:a.转灰度图,绝对值做差 b.二值化,腐蚀,中值滤波,膨胀 c.查找轮廓,筛选轮廓,绘制外接矩形,计数,输出
#include "opencv2/opencv.hpp"
#include<iostream>
using namespace std;
using namespace cv; int CarNum = ;
//int to string helper function
string intToString(int number)
{
//this function has a number input and string output
stringstream ss;
ss << number;
return ss.str();
} Mat MoveDetect(Mat frame1, Mat frame2) {
Mat result = frame2.clone();
Mat gray1, gray2;
cvtColor(frame1, gray1, CV_BGR2GRAY);
cvtColor(frame2, gray2, CV_BGR2GRAY); Mat diff;
absdiff(gray1, gray2, diff);
//imshow("absdiss", diff);
threshold(diff, diff, , , CV_THRESH_BINARY);
imshow("threshold", diff); Mat element = getStructuringElement(MORPH_RECT, Size(, ));
Mat element2 = getStructuringElement(MORPH_RECT, Size(, ));
erode(diff, diff, element);
//imshow("erode", dst);
medianBlur(diff, diff, );
imshow("medianBlur", diff);
dilate(diff, diff, element2);
imshow("dilate", diff); vector<vector<Point>> contours;
vector<Vec4i> hierarcy;
findContours(diff, contours, hierarcy, CV_RETR_EXTERNAL, CV_CHAIN_APPROX_SIMPLE, Point(, ));//查找轮廓
vector<vector<Point>>contours_poly(contours.size());
vector<Rect> boundRect(contours.size()); //定义外接矩形集合
//drawContours(img2, contours, -1, Scalar(0, 0, 255), 1, 8); //绘制轮廓
int x0 = , y0 = , w0 = , h0 = ;
for (int i = ; i<contours.size(); i++)
{
approxPolyDP(Mat(contours[i]), contours_poly[i], , true);//对图像轮廓点进行多边形拟合:轮廓点组成的点集,输出的多边形点集,精度(即两个轮廓点之间的距离),输出多边形是否封闭
boundRect[i] = boundingRect(Mat(contours_poly[i]));
if (boundRect[i].width> && boundRect[i].width< && boundRect[i].height> && boundRect[i].height<) {//轮廓筛选
x0 = boundRect[i].x;
y0 = boundRect[i].y;
w0 = boundRect[i].width;
h0 = boundRect[i].height; rectangle(result, Point(x0, y0), Point(x0 + w0, y0 + h0), Scalar(, , ), , , );
if ((y0 + h0 / + ) >= && (y0 + h0 / - ) <= ) {//经过这条线(区间),车辆数量+1
CarNum++;
}
}
line(result, Point(, ), Point(, ), Scalar(, , ), , );//画红线
Point org(, );
putText(result, "CarNum=" + intToString(CarNum), org, CV_FONT_HERSHEY_SIMPLEX, 0.8f, Scalar(, , ), );
}
return result;
} void main()
{
VideoCapture cap("E://2.avi");
if (!cap.isOpened()) //检查打开是否成功
return;
Mat frame;
Mat tmp;
Mat result;
int count = ;
while ()
{
cap >> frame;
if(frame.empty())//检查视频是否结束
break;
else{
count++;
if (count == )
result = MoveDetect(frame, frame);
else result = MoveDetect(tmp, frame);
imshow("video", frame);
imshow("result", result);
tmp = frame.clone();
if (waitKey() == )
break;
}
}
cap.release();
}

opencv学习之路(37)、运动物体检测(二)的更多相关文章
- opencv学习之路【四】——opencv文件结构介绍
这里要感谢这篇博主的文章 部分内容转载自此 opencv在2.3版本之前 都是用的c语言实现的 而在2.3以后的版本 做了很多重大的改变 其中最主要的是用c++重写大部分结构 然后文件的结构和2.0之 ...
- opencv学习之路(36)、运动物体检测(一)
一.简介 二.背景减法 图片说明 #include "opencv2/opencv.hpp"using namespace cv; void main() { Mat img1 = ...
- opencv学习之路(32)、角点检测
一.角点检测的相关概念 二.Harris角点检测——cornerHarris() 参考网址: http://www.cnblogs.com/ronny/p/4009425.html #include ...
- OpenCV 学习笔记03 直线和圆检测
检测边缘和轮廓不仅重要,还经常用到,它们也是构成其他复杂操作的基础. 直线和形状检测与边缘和轮廓检测有密切的关系. 霍夫hough 变换是直线和形状检测背后的理论基础.霍夫变化是基于极坐标和向量开展的 ...
- Opencv学习之路—Opencv下基于HOG特征的KNN算法分类训练
在计算机视觉研究当中,HOG算法和LBP算法算是基础算法,但是却十分重要.后期很多图像特征提取的算法都是基于HOG和LBP,所以了解和掌握HOG,是学习计算机视觉的前提和基础. HOG算法的原理很多资 ...
- opencv学习之路(41)、人脸识别
一.人脸检测并采集个人图像 //take_photo.cpp #include<opencv2/opencv.hpp> using namespace cv; using namespac ...
- opencv学习之路(35)、SURF特征点提取与匹配(三)
一.简介 二.opencv中的SURF算法接口 三.特征点匹配方法 四.代码 1.特征点提取 #include "opencv2/opencv.hpp" #include < ...
- opencv学习之路(34)、SIFT特征匹配(二)
一.特征匹配简介 二.暴力匹配 1.nth_element筛选 #include "opencv2/opencv.hpp" #include <opencv2/nonfree ...
- opencv学习之路(33)、SIFT特征点提取(一)
一.简介 二.OpenCV中的SIFT算法接口 #include "opencv2/opencv.hpp" #include <opencv2/nonfree/nonfree ...
随机推荐
- java_基础_abstract抽象关键字
java中,当父类中的某些东西不确定时,可以用abstract关键字将此类变成抽象类(也就是说类并不完整,有些东西要等待子类去实现) 注意事项: 1.抽象类中的抽象方法不能有实体,格式如下 publi ...
- 5. Scala函数式编程的基础
5.1 函数式编程内容及介绍顺序说明 5.1.1 函数式编程内容 -函数式编程基础 函数定义/声明 函数运行机制 递归(难点,[最短路径,邮差问题,迷宫问题,回溯]) 过程 惰性函数和异常 -函数式编 ...
- Express全系列教程之(一):Express的安装 和第一个程序
前言 ndoe.js,一个基于javsscript运行环境的服务器语言,它的出现使得javascript有能力去实现服务器操作.在gitHub上ndoe.js的star数已接近6万,可见其受欢迎程度: ...
- webpack4.27.1中遇到的错误
1:ERROR in Entry module not found: Error: Can't resolve './src' 我在使用webpack命令时报错,这时因为我的配置文件有问题webpac ...
- 学号 20175201张驰 《Java程序设计》第5周学习总结
学号 20175201张驰 <Java程序设计>第5周学习总结 教材学习内容总结 第六章 ·1.接口的接口体中只可以有常量和abstract方法. ·2.和类一样,接口也是Java中一种重 ...
- Module 3 - Azure - Web Apps
Module 3 - 微软云 Azure - Web Apps 1. Create new Web application in the Azure Portal Azure Portal -> ...
- ln -s软链接文件算文件吗
场景: 开发A在windows环境下完成了开发,配置管理员cm搭建jenkins在centos环境下编译,cm编译失败,但是开发A在他的windows环境下可以编译过,最后发现是某几个so文件的软链接 ...
- 实现hibernate 的validator校验
Validator校验分为快速校验和全校验.快速校验是当遇到第一个参数不符合条件时,立即停止校验程序,将校验不通过的信息返回到前端:全校验是将前端传过来的参数全部进行校验,将所有不通过校验的信息一起返 ...
- 爬取豆瓣电影排行top250
功能描述V1.0: 爬取豆瓣电影排行top250 功能分析: 使用的库 1.time 2.json 3.requests 4.BuautifulSoup 5.RequestException 上机实验 ...
- MySql数据库中,判断表、表字段是否存在,不存在就新增
本文是针对MySql数据库创建的SQL脚本,别搞错咯. 判断表是否存在,不存在就可新增 CREATE TABLE IF NOT EXISTS `mem_cardtype_resource` ( ... ...