ROS2时间同步(python)
最近1周一直研究ROS2的时间同步,翻越很多博客,很少有人使用ROS2进行时间同步的代码,无奈不断尝试与源码阅读,终于将其搞定,
为此,本博客将介绍基于python的ROS2的时间同步方法。
本博客内容结构为话题发布代码,话题订阅与时间同步代码,代码文件夹结构及结果显示图片。本博客假设2个publisher和一个scribe,同步是在scibe中完成。
一.话题发布代码
发布1为第二个发布者,可理解为某传感器
publisher1代码如下:
#!/usr/bin/env python3
import rclpy
from rclpy.node import Node
from std_msgs.msg import String,Float32,Int32
import cv2
# from std_msgs.msg import Header
import time
class NodePublisher(Node):
def __init__(self,name):
super().__init__(name)
self.get_logger().info("大家好,我是%s!" % name)
self.num=0
self.command_publisher1 = self.create_publisher(Int32,"command1", 10)
self.timer = self.create_timer(0.4, self.timer_callback) #
# self.inputdata1()
def inputdata1(self):
msg = Int32() #String()
period=0.5
print("publisher1-周期",period)
self.get_logger().info(f'发布了指令:{msg.data}') #打印一下发布的数据
num=0
while True:
num=num+1
msg.data = num #str(num) self.command_publisher_.publish(msg)
# time.sleep(period)
self.get_logger().info(f'发布了指令:{msg.data}') #打印一下发布的数据
def timer_callback(self):
msg = Int32() #String()
self.num+=1
msg.data = self.num #str(num)
self.command_publisher1.publish(msg)
self.get_logger().info(f'发布了指令:{msg.data}') #打印一下发布的数据
def main(args=None):
rclpy.init(args=args) # 初始化rclpy
node = NodePublisher("topic_publisher1") # 新建一个节点
rclpy.spin(node) # 保持节点运行,检测是否收到退出指令(Ctrl+C)
rclpy.shutdown() # 关闭rclpy
发布2为第二个发布者,可理解为某传感器
publisher2代码如下:
#!/usr/bin/env python3
import rclpy
from rclpy.node import Node
from std_msgs.msg import String,Float32,Int32
import time
class NodePublisher(Node):
def __init__(self,name):
super().__init__(name)
self.get_logger().info("大家好,我是%s!" % name)
self.num=0
self.command_publisher2= self.create_publisher(Int32,"command2", 10)
self.timer = self.create_timer(0.2, self.timer_callback) #
def timer_callback(self):
msg = Int32() #String()
self.num+=1
msg.data = self.num #str(num)
self.command_publisher2.publish(msg)
self.get_logger().info(f'发布了指令:{msg.data}') #打印一下发布的数据
def main(args=None):
rclpy.init(args=args) # 初始化rclpy
node = NodePublisher("topic_publisher2") # 新建一个节点
rclpy.spin(node) # 保持节点运行,检测是否收到退出指令(Ctrl+C)
rclpy.shutdown() # 关闭rclpy
二.话题订阅及时间同步代码
订阅发布者信息,并将其同步,可理解为同步不同传感器
scriabe代码如下:
#!/usr/bin/env python3
import rclpy
from rclpy.node import Node
import message_filters
from std_msgs.msg import String,Float32,Int32
import message_filters
from sensor_msgs.msg import Image, CameraInfo
def callback(image_sub,info_sub):
res=int(info_sub.data)-int(image_sub.data)
print("publisher1:\t{}\tpubsher2:\t{}\t{}".format(str(image_sub.data),str(info_sub.data),res))
def main(args=None):
rclpy.init(args=args) # 初始化rclpy
scribe_node=Node('scribe_time') image_sub = message_filters.Subscriber(scribe_node, Int32,'command1')
info_sub = message_filters.Subscriber(scribe_node, Int32,'command2') ts = message_filters.ApproximateTimeSynchronizer([image_sub, info_sub], 10, 0.1, allow_headerless=True) # allow_headerless=True,可以不使用时间戳
# ts = message_filters.TimeSynchronizer([image_sub, info_sub], 10) # 这个需要时间戳才可调用
ts.registerCallback(callback)
rclpy.spin(scribe_node)
rospy.spin()
三.参数配置及文件格式
setup.py设置如下:
from setuptools import setup
package_name = 'topic_time'
setup(
name=package_name,
version='0.0.0',
packages=[package_name],
data_files=[
('share/ament_index/resource_index/packages',
['resource/' + package_name]),
('share/' + package_name, ['package.xml']),
],
install_requires=['setuptools'],
zip_safe=True,
maintainer='root',
maintainer_email='root@todo.todo',
description='TODO: Package description',
license='TODO: License declaration',
tests_require=['pytest'],
entry_points={
'console_scripts': [
"publisher1_node = topic_time.publisher1:main",
"publisher2_node = topic_time.publisher2:main",
"subscribe_node = topic_time.subscribe:main",
"subscribe2_node = topic_time.subscribe2:main" ],
},
)
文件格式如下:

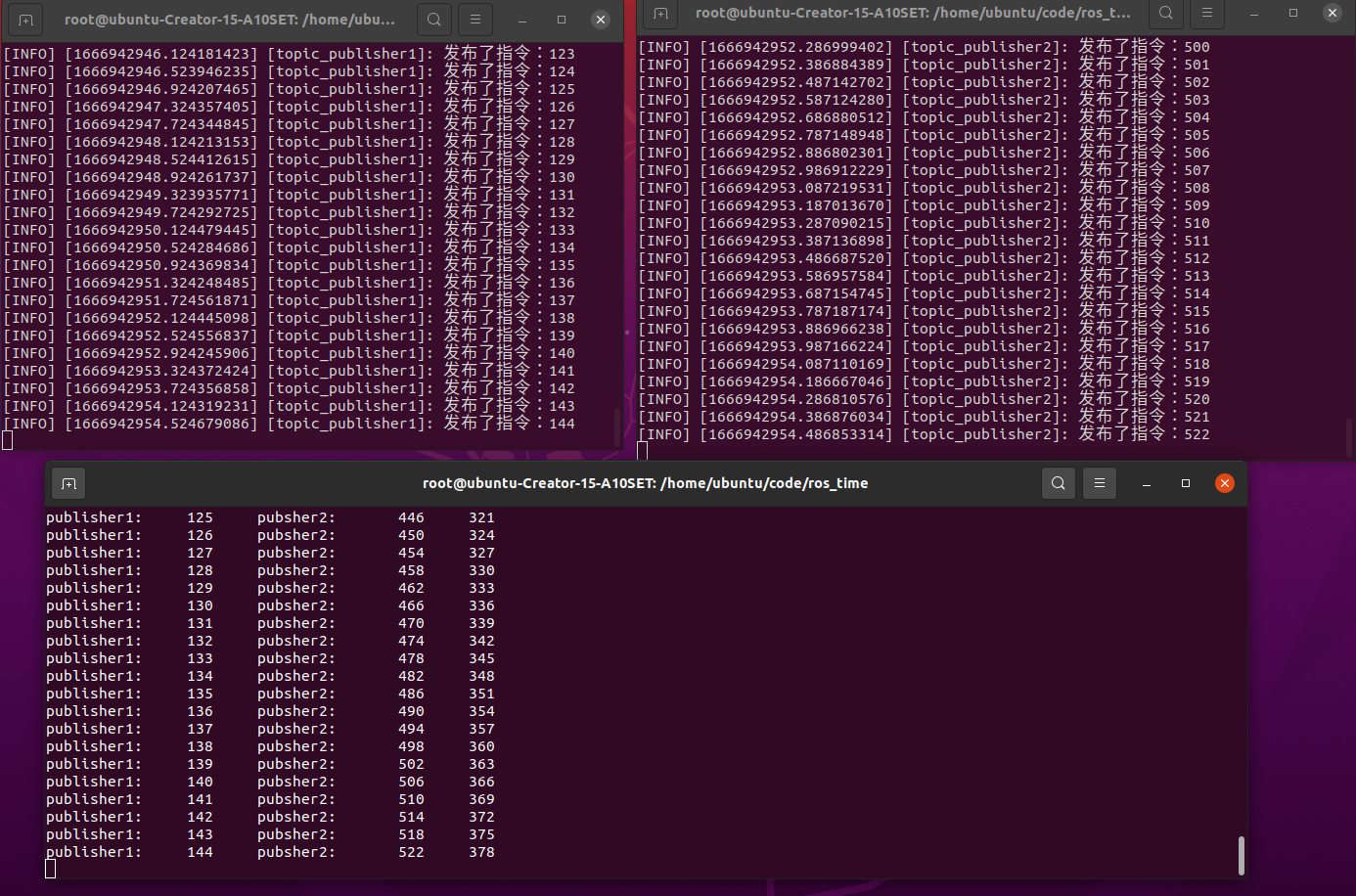
通过以上代码将可看到同步的scribe中发布1时间无间隔,发布2时间间隔为4,恰好与设置周期同等,结果显示如下:
ROS2时间同步(python)的更多相关文章
- python windows时间同步工具
由于某种原因(BIOS电池没电),电脑的系统时间会与我们的北京时间不同步,将会导致如下问题: 1. 抢火车票的时候已经过时间了 2.别的同事都走了,你还以为没下班 …… 规避问题的方法:同步系统时间 ...
- ros2中创建一个python package
完整的python package的目录结构如下: source /opt/ros/dashing/setup.bash cd ros2_ws/src && ros2 pkg crea ...
- 树莓派3b添加python时间同步脚本
树莓派没有电池,因此断电后系统时间会停止,直到你开机后又继续计时,所以会造成系统时间和实际时间有很大的误差. 因为项目需要用到本地时间,精度要求不高不想折腾(如果需要高精度,需要安装ntp),所以考虑 ...
- python 入门1
python的历史 Python是一种解释型.面向对象.动态数据类型的高级程序设计语言. Python由Guido van Rossum于1989年底发明,第一个公开发行版发行于1991年. 像Per ...
- python网络进阶篇
并发编程 进程 操作系统的历史 # 手工操作 —— 穿孔卡片 # 程序员将对应于程序和数据的已穿孔的纸带(或卡片)装入输入机,然后启动输入机把程序和数据输入计算机内存,接着通过控制台开关启动程序针对数 ...
- 大数据项目之_15_帮助文档_NTP 配置时间服务器+Linux 集群服务群起脚本+CentOS6.8 升级到 python 到 2.7
一.NTP 配置时间服务器1.1.检查当前系统时区1.2.同步时间1.3.检查软件包1.4.修改 ntp 配置文件1.5.重启 ntp 服务1.6.设置定时同步任务二.Linux 集群服务群起脚本2. ...
- python并发_线程
关于进程的复习: # 管道 # 数据的共享 Manager dict list # 进程池 # cpu个数+1 # ret = map(func,iterable) # 异步 自带close和join ...
- [转] ROS2源码编译和安装
机器人开源操作系统软件ROS在10年后, 终于推出全新架构的ROS2,代号“ardent”.中文意思为“热心的美洲鳖”,看来ROS2要从ROS1的“海龟”变成“土鳖”系列了. 与此同时,ROS2的编译 ...
- python 全栈开发,Day34(基于UDP协议的socket)
昨日内容回顾 网络的基础概念arp协议 :通过ip地址找到mac地址五层模型 : 应用层 传输层 网络层 数据链路层 物理层tcp协议 : 可靠的 面向连接 全双工 三次握手 四次挥手udp协议 : ...
随机推荐
- 前端React项目遇到【Uncaught SyntaxError: Unexpected token '<'】错误的解决方式
问题描述 前端部署好项目后,打开相应的页面显示一片空白,打开console显示 问题排查思路 理解问题的本质 出现这个错误的原因是浏览器期望得到js文件,但页面却返回了html文件,如图中的js文件点 ...
- java-分支结构(四种基本分支结构的认识)
分支结构:有条件的执行某语句,并非每句必走 1)if结构:1条路 2)if...else结构:2条路 3)if...else if结构:多条路 4)switch...case结构:多条路 优点:效率高 ...
- Java SE 15 新增特性
Java SE 15 新增特性 作者:Grey 原文地址:Java SE 15 新增特性 源码 源仓库: Github:java_new_features 镜像仓库: GitCode:java_new ...
- 内网渗透之vlunstack靶场
前言:vlunstack靶场是由三台虚拟机构成,一台是有外网ip的windows7系统(nat模式),另外两台是纯内网机器(外网ping不通),分别是域控win2008和内网主机win2003,这里就 ...
- NOI2022游记,Au
前言 8.19: 说实话,我在这里说几句话还不如水群, 新番把我心态搞炸了,我现在急需快乐 所以像游记这种吹水+回忆的文章让我现在非常痛苦. Day -1 (8.19) 上午是信心赛,太好辣,坐等D3 ...
- PHP代码审计学习-php安全基础
PHP代码审计-php安全基础 php.ini选项 register_globals php>=4.2.0,php.ini 的 register_globals 选项的默认值预设为 Off,当 ...
- Jenkins+SpringCloud(多模块)+Vue项目详细配置
一.Jenkins安装及所需插件安装 安装过程略. 我这用到工具包括JDK.Git.Maven.NodeJS:可以选择自行在服务器安装,也可以通过Jenkins自动安装,位置在系统管理 >全局工 ...
- Dubbo源码(九) - 服务调用过程
1. 前言 本文基于Dubbo2.6.x版本,中文注释版源码已上传github:xiaoguyu/dubbo 源码分析均基于官方Demo,路径:dubbo/dubbo-demo 如果没有看过之前Dub ...
- java代码审计的点
java代码审计的点 组件的审计 首先看pom.xml查看第三方组件和第三方组件的版本 常用的第三方组件: 第三方组件 漏洞类型 组件漏洞版本 log4j2 远程代码执行 Apache log4j2 ...
- 类似微信聊天小程序-网易云信,IM DEMO小程序版本
类似微信聊天小程序-网易云信,IM DEMO小程序版本 代码地址: https://github.com/netease-im/NIM_Web_Weapp_Demo 云信IM DEMO 小程序版本 ( ...