【机器人】—— 1. ROS 概述与环境搭建
1. ROS 简介
1.1 ROS 诞生背景
机器人是一种高度复杂的系统性实现,机器人设计包含了机械加工、机械结构设计、硬件设计、嵌入式软件设计、上层软件设计....是各种硬件与软件集成,甚至可以说机器人系统是当今工业体系的集大成者。
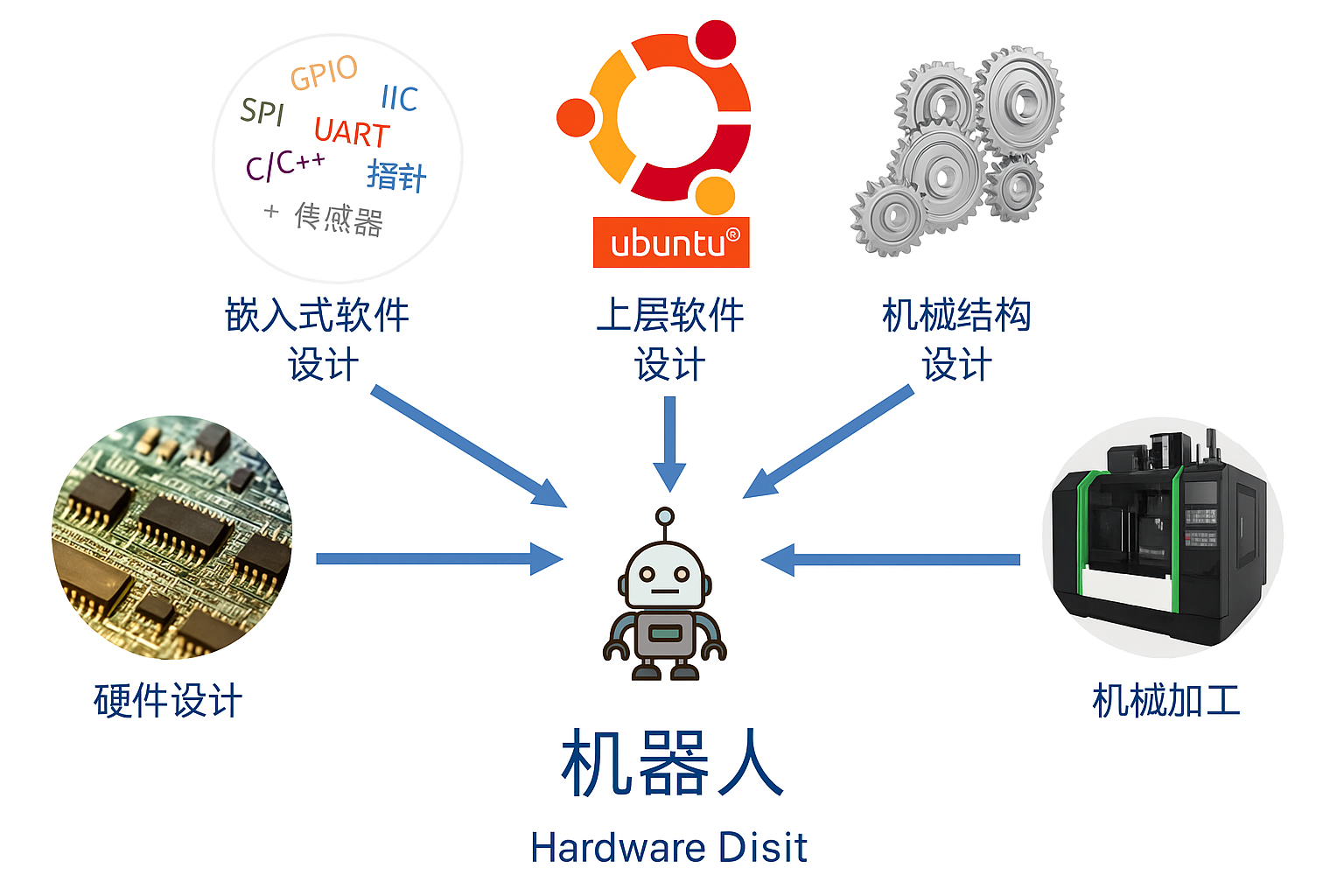
机器人体系是相当庞大的,其复杂度之高,以至于没有任何个人、组织甚至公司能够独立完成系统性的机器人研发工作。
一种更合适的策略是:让机器人研发者专注于自己擅长的领域,其他模块则直接复用相关领域更专业研发团队的实现,当然自身的研究也可以被他人继续复用。这种基于"复用"的分工协作,遵循了不重复发明轮子的原则,显然是可以大大提高机器人的研发效率的,尤其是随着机器人硬件越来越丰富,软件库越来越庞大,这种复用性和模块化开发需求也愈发强烈。
在此大背景下,2007年,一家名为柳树车库(Willow Garage)的机器人公司发布了 ROS(机器人操作系统),ROS 是一套机器人通用软件框架,可以提升功能模块的复用性,并且随着该系统的不断迭代与完善,如今 ROS 已经成为机器人领域的事实标准。
1.2 ROS 相关概念
★ ROS 全称为 Robot Operating System(机器人操作系统)。
★ ROS 是适用于机器人的开源元操作系统。
★ ROS 集成了大量的工具,库,协议,提供类似 OS 所提供的功能,简化了对机器人的控制。
★ ROS 提供了用于在多台计算机上获取,构建,编写和运行代码的工具和库,ROS 在某些方面类似于“机器人框架”。
ROS 设计者将 ROS 表述为“ROS = Plumbing + Tools + Capabilities + Ecosystem”,即 ROS 是通讯机制、工具软件包、机器人高层技能以及机器人生态系统的集合体。

1.3 ROS 设计目标
机器人开发的分工思想,实现了不同研发团队间的共享和协作,提升了机器人的研发效率,为了服务“ 分工”,ROS 主要设计了如下目标:
代码复用:ROS 的目标不是成为具有最多功能的框架,ROS 的主要目标是支持机器人技术研发中的代码重用。
分布式:ROS 是进程(也称为Nodes)的分布式框架,ROS 中的进程可分布于不同主机,不同主机协同工作,从而分散计算压力。
松耦合:ROS 中功能模块封装于独立的功能包或元功能包,便于分享,功能包内的模块以节点为单位运行,以 ROS 标准的 IO 作为接口,开发者不需要关注模块内部实现,只要了解接口规则就能实现复用,实现了模块间点对点的松耦合连接。
精简:ROS 被设计为尽可能精简,以便为 ROS 编写的代码可以与其他机器人软件框架一起使用。ROS易于与其他机器人软件框架集成:ROS 已与 OpenRAVE、Orocos 和 Player 集成。
语言独立性:包括Java,C++,Python等。为了支持更多应用开发和移植,ROS 设计为一种语言弱相关的框架结构,使用简洁,中立的定义语言描述模块间的消息接口,在编译中再产生所使用语言的目标文件,为消息交互提供支持,同时允许消息接口的嵌套使用。
易于测试:ROS 具有称为 rostest 的内置单元/集成测试框架,可轻松安装和拆卸测试工具。
大型应用:ROS 适用于大型运行时系统和大型开发流程。
丰富的组件化工具包:ROS 可采用组件化方式集成一些工具和软件到系统中并作为一个组件直接使用,如RVIZ(3D可视化工具),开发者根据 ROS 定义的接口在其中显示机器人模型等,组件还包括仿真环境和消息查看工具等。
免费且开源:开发者众多,功能包多。
1.4 ROS 发展历程
ROS是一个由来已久、贡献者众多的大型软件项目。在 ROS 诞生之前,很多学者认为,机器人研究需要一个开放式的协作框架,并且已经有不少类似的项目致力于实现这样的框架。在这些工作中,斯坦福大学在2000年年中开展了一系列相关研究项目,如斯坦福人工智能机器人(STandford AI Robot, STAIR)项目、个人机器人(Personal Robots, PR)项目等,在上述项目中,在研究具有代表性、集成式人工智能系统的过程中,创立了用于室内场景的高灵活性、动态软件系统,其可以用于机器人学研究。
2007年,柳树车库(Willow Garage)提供了大量资源,用于将斯坦福大学机器人项目中的软件系统进行扩展与完善,同时,在无数研究人员的共同努力下,ROS 的核心思想和基本软件包逐渐得到完善。
ROS 的发行版本(ROS distribution)指 ROS 软件包的版本,其与Linux的发行版本(如Ubuntu)的概念类似。推出 ROS 发行版本的目的在于使开发人员可以使用相对稳定的代码库,直到其准备好将所有内容进行版本升级为止。因此,每个发行版本推出后,ROS 开发者通常仅对这一版本的 bug 进行修复,同时提供少量针对核心软件包的改进。
版本特点: 按照英文字母顺序命名,ROS 目前已经发布了 ROS1 的终极版本:noetic,并建议后期过渡至 ROS2 版本。noetic 版本之前默认使用的是 Python2,noetic 支持 Python3。
【建议版本】: noetic 或 melodic 或 kinetic。

2. ROS 安装
我们使用的是 ROS 版本是 Noetic,因此可以在 Ubuntu20.04、Mac 或 Windows10 系统上安装。虽然一般用户平时使用的操作系统以 Windows 居多,但是 ROS 之前的版本基本都不支持 Windows,所以当前我们选用的操作系统是 Ubuntu,以方便向历史版本过渡。
Ubuntu 安装常用方式有两种:
✎ 方案1:实体机安装 Ubuntu (较为常用的是使用双系统,Windows 与 Ubuntu 并存)。
✎ 方案2:虚拟机安装 Ubuntu。
两种方式比较,各有优缺点:
☃ 方案1:可以保证性能,且不需要考虑硬件兼容性问题,但是和 Windows 系统交互不便。
☃ 方案2:可以方便的实现 Windows 与 Ubuntu 交互,不过性能稍差,且与硬件交互不便。
在 ROS 中,一些仿真操作是比较耗费系统资源的,且经常需要和一些硬件(雷达、摄像头、imu、STM32、arduino....)交互,因此,原则上建议采用方案1,不过如果只是出于学习目的,那么方案2也基本够用,且方案2在 Windows 与 Ubuntu 的交互上更为方便,对于学习者更为友好,因此本教程在此选用的是方案2。当然,具体采用哪种实现方案,请按需选择。
如果采用虚拟机安装 Ubuntu,再安装 ROS 的话,大致流程如下:
1、安装虚拟机软件(比如:virtualbox 或 VMware);
2、使用虚拟机软件虚拟一台主机;
3、在虚拟主机上安装 Ubuntu 20.04;
4、在 Ubuntu 上安装 ROS;
5、测试 ROS 环境是否可以正常运行。
虚拟机软件选择上,对于我们学习而言 virtualbox 和 VMware 都可以满足需求,二者比较,前者免费,后者收费。
2.1 安装虚拟机软件
安装 VMware Workstation 需要先访问官网,下载安装包。
官网下载地址:官网下载。
下载后正常安装。
2.2 虚拟一台主机
使用 VMware 虚拟计算机的过程也不算复杂,只需要按照提示配置其相关参数即可。
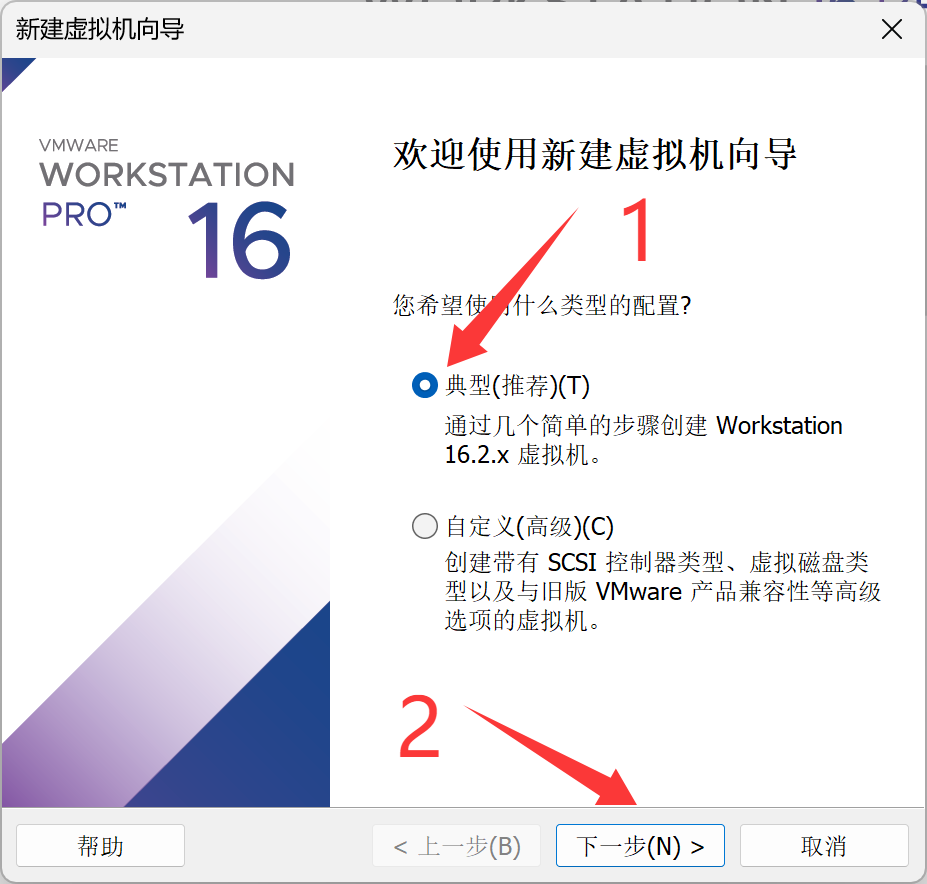
打开 VMware Workstation ,在主界面点击【创建新的虚拟机】:

下一步:
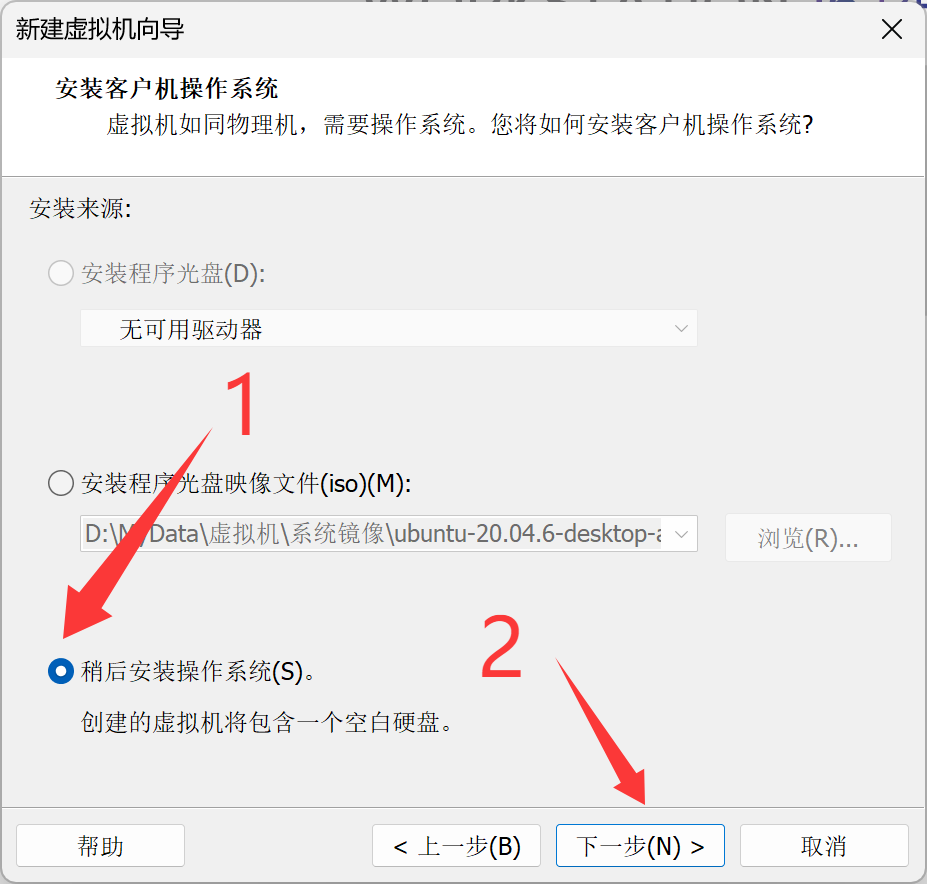
选择稍后安装操作系统:
依次选择 Linux,Ubuntu 64位:

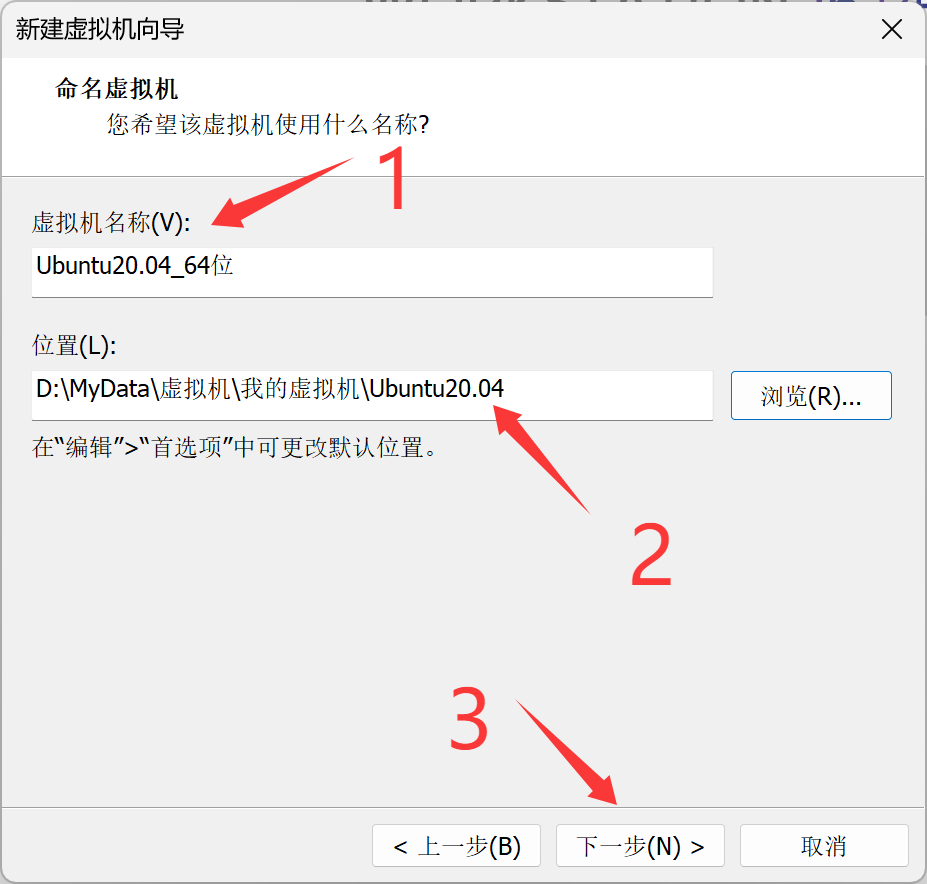
设置虚拟机名称、存放位置:
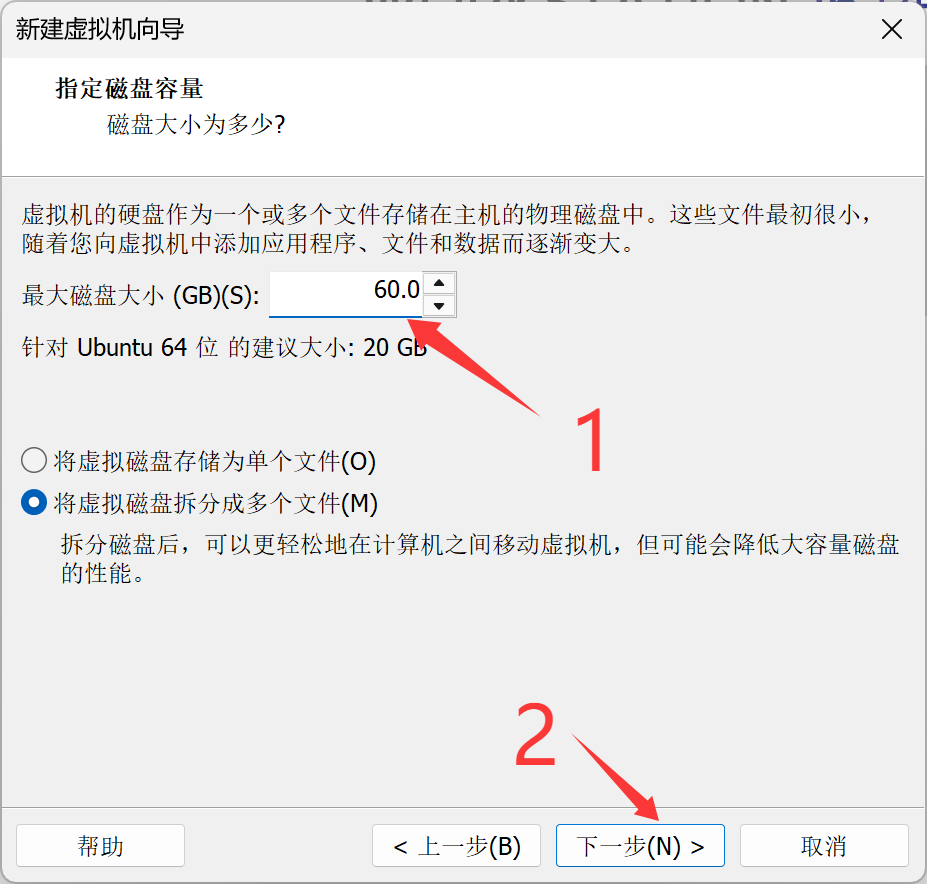
为虚拟机分配磁盘大小(上限),不是真实大小,用多少占多少:
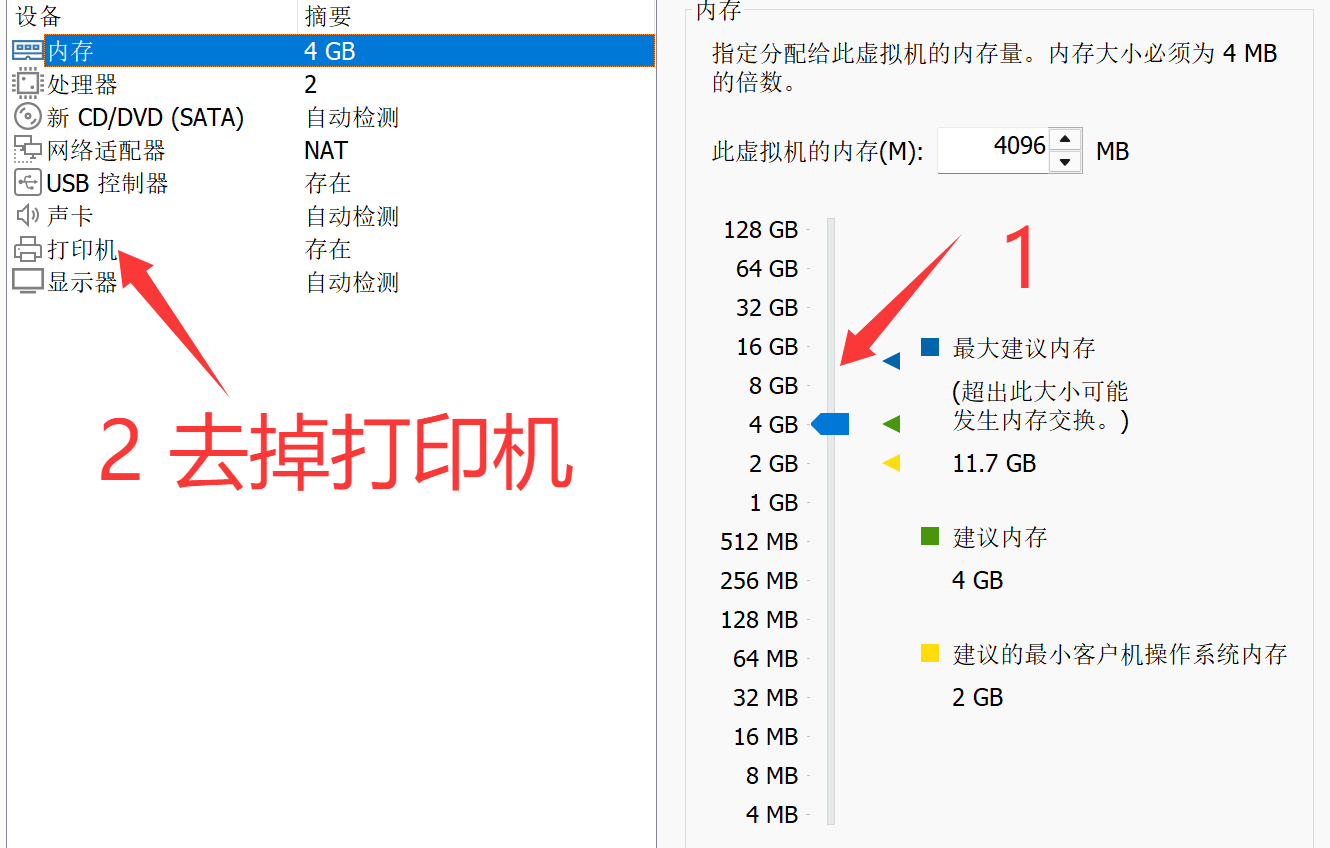
硬件信息配置,设置内存(最低4G)、移除打印机:
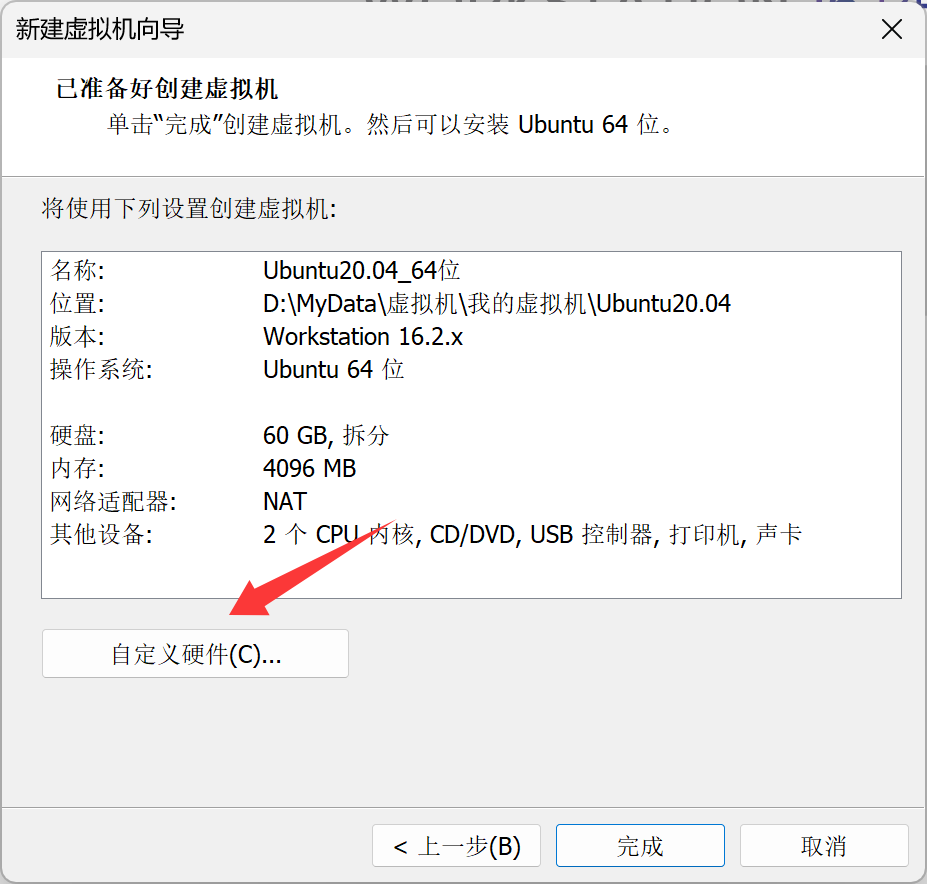
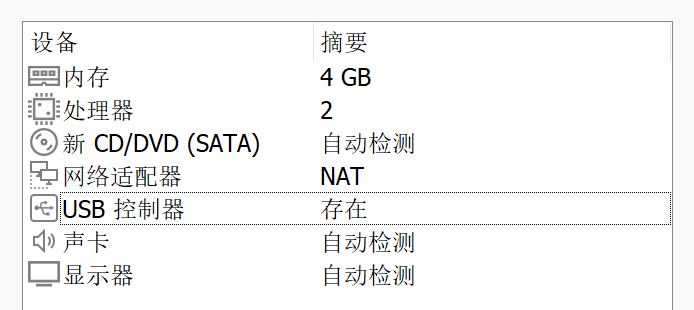
最终信息如下:
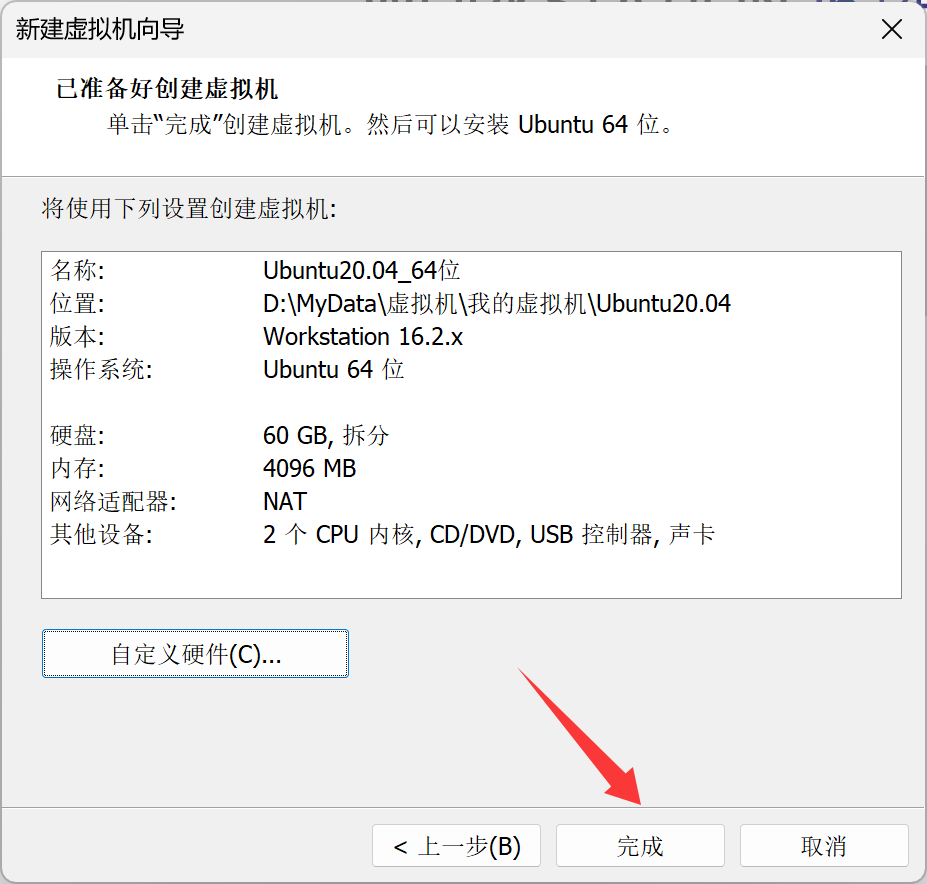
创建完成:
2.3 安装 Ubuntu
2.3.1 系统安装
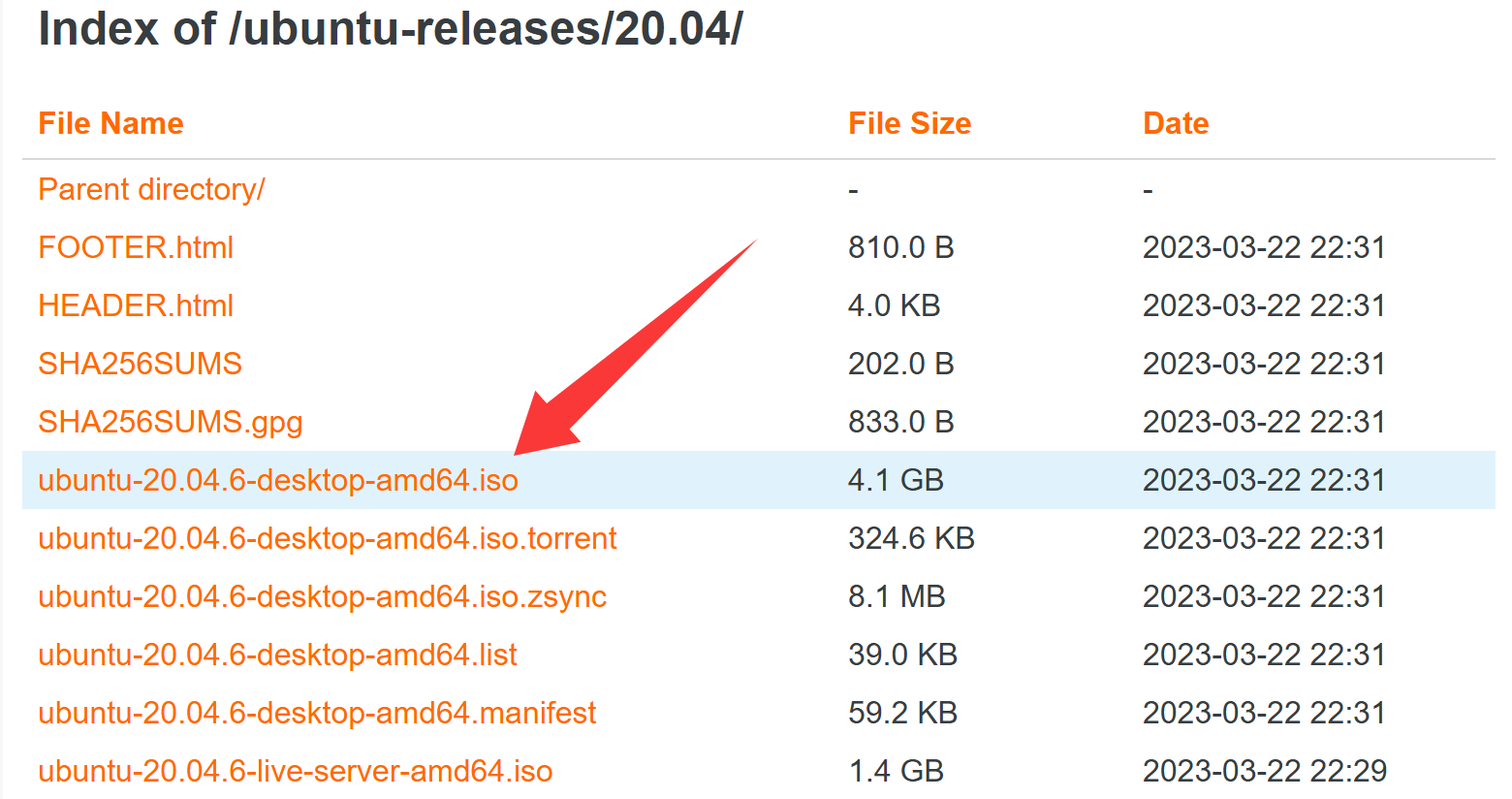
首先,下载 Ubuntu 的镜像文件,阿里云官网镜像下载链接。
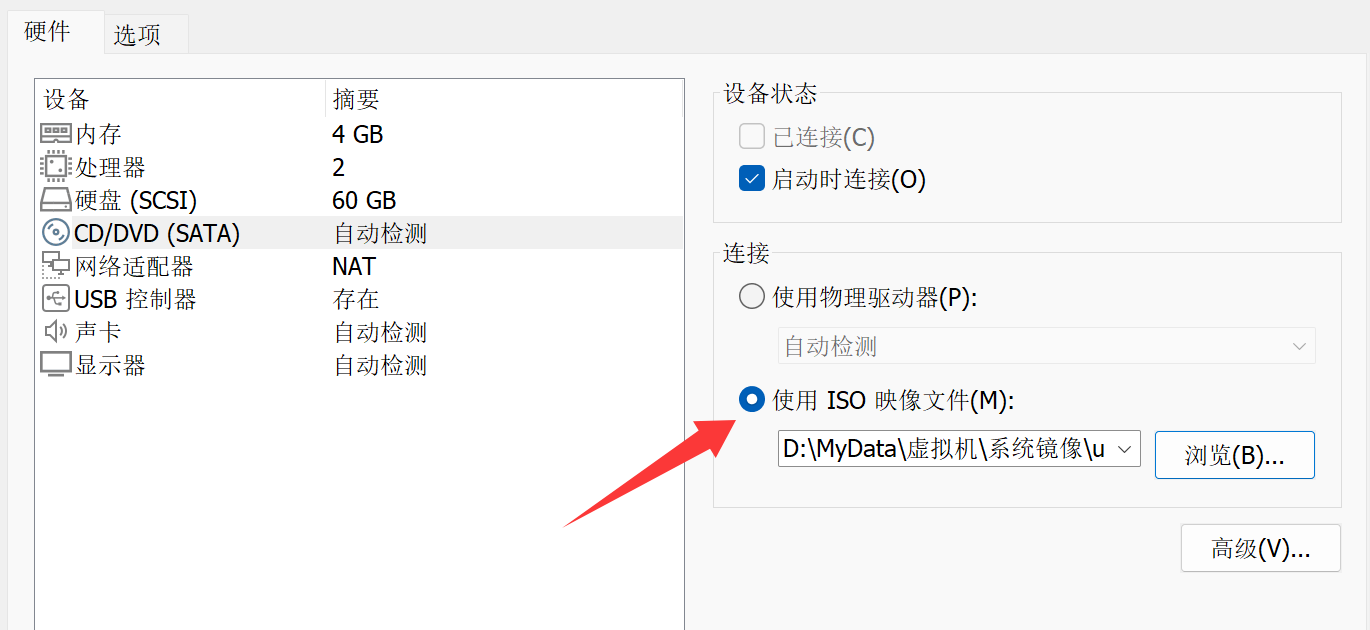
然后,配置虚拟主机,关联 Ubuntu 镜像文件。
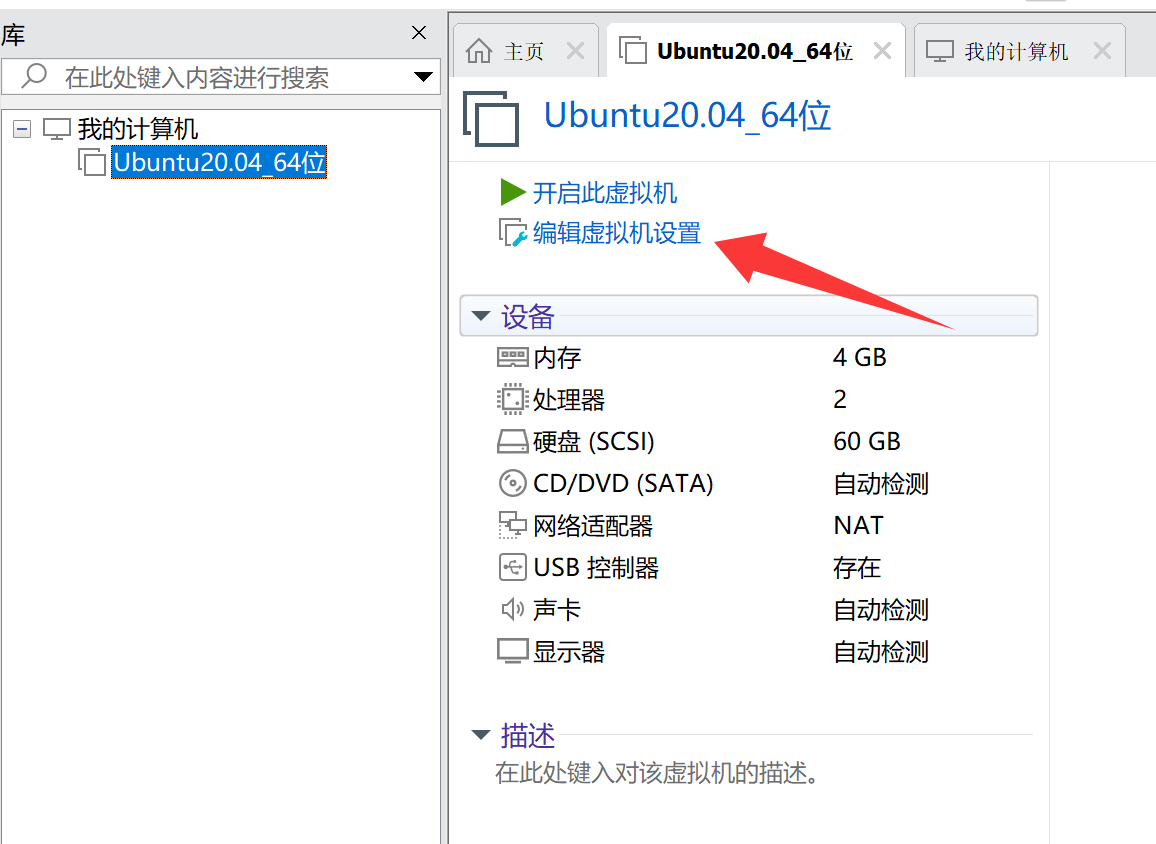
使用下载好的 ISO 镜像文件:
最后,打开虚拟机,安装系统,系统正常安装就好。
『可能出现的问题一』
安装界面显示不全,无法进行正常安装。
『解决步骤』
1、选择语言,点击试用系统;
2、右上角点击设置,设置屏幕分辨率;
3、点击桌面的安装系统;
4、开始安装。
【温馨提示】
root 初始密码更改命令如下:
sudo passwd root
2.3.2 配置远程连接
① 安装 openssh-server 服务
sudo apt-get install openssh-server
② 安装 ufw
sudo apt-get install ufw
③ 使用 ufw 开启22端口
sudo ufw enable sudo ufw allow 22
④ 查看 ip 命令
sudo apt install net-tools ifconfig
⑤ 使用 Xshell 测试连接
2.3.3 文件交互配置
使用 Xshell 来操作服务非常方便,传文件也比较方便,就是使用rz,sz。
首先,服务器要安装了rz,sz:
sudo apt install lrzsz
✎ 运行 sudo rz ,会将 Windows 的文件传到 Linux 服务。
✎ 运行 sudo sz filename ,会将文件下载到 Windows本地。
2.4 安装 ROS
Ubuntu 安装完毕后,就可以安装 ROS 操作系统了,大致步骤如下:
① 配置 Ubuntu 的软件和更新;
② 设置安装源;
③ 设置 key;
④ 安装;
⑤ 配置环境变量;
⑥ 安装构建依赖。
2.4.1 配置 Ubuntu 的软件和更新
配置 Ubuntu 的软件和更新,允许安装不经认证的软件。
首先打开“软件和更新”对话框,具体可以在 Ubuntu 搜索按钮中搜索。打开后按照下图进行配置(确保勾选了"restricted", "universe," 和 "multiverse.")。

2.4.2 设置安装源
配置国内南京大学的安装源:(推荐)
sudo sh -c '. /etc/lsb-release && echo "deb http://mirrors.nju.edu.cn/ros/ubuntu/ `lsb_release -cs` main" > /etc/apt/sources.list.d/ros-latest.list'
或:官方默认安装源:
sudo sh -c 'echo "deb http://packages.ros.org/ros/ubuntu $(lsb_release -sc) main" > /etc/apt/sources.list.d/ros-latest.list'
或:来自国内清华的安装源
sudo sh -c '. /etc/lsb-release && echo "deb http://mirrors.tuna.tsinghua.edu.cn/ros/ubuntu/ `lsb_release -cs` main" > /etc/apt/sources.list.d/ros-latest.list'
或:来自国内中科大的安装源
sudo sh -c '. /etc/lsb-release && echo "deb http://mirrors.ustc.edu.cn/ros/ubuntu/ `lsb_release -cs` main" > /etc/apt/sources.list.d/ros-latest.list'
2.4.3 设置 key
sudo apt install curl curl -s https://gitee.com/zhao-xuzuo/rosdistro/raw/master/ros.asc | sudo apt-key add -
下载密钥文件:文件链接。
下载后,保存文件名为 “ros.asc”,传入虚拟机。
在文件所在文件夹下打开终端,输入:
sudo apt-key add ros.asc
2.4.4 安装
首先,更新 apt(以前是 apt-get,官方建议使用 apt 而非 apt-get),apt 是用于从互联网仓库搜索、安装、升级、卸载软件或操作系统的工具。
sudo apt update sudo apt upgrade
等待...
此处可能出现报错。。。
然后,再安装所需类型的 ROS。ROS 的多个类型:Desktop-Full、Desktop、ROS-Base。这里介绍较为常用的Desktop-Full(官方推荐)安装: ROS, rqt, rviz, robot-generic libraries, 2D/3D simulators, navigation and 2D/3D perception。
sudo apt install ros-noetic-desktop-full
等待......(比较耗时)
友情提示: 由于网络原因,导致连接超时,可能会安装失败,可以多次重复调用 更新 和 安装命令,直至成功。
2.4.5 配置环境变量
配置环境变量,方便在任意终端中使用 ROS。
echo "source /opt/ros/noetic/setup.bash" >> ~/.bashrc source ~/.bashrc
2.4.6 安装构建依赖
在 noetic 最初发布时,和其他历史版本稍有差异的是:没有安装构建依赖这一步骤。随着 noetic 不断完善,官方补齐了这一操作。
首先,安装构建依赖的相关工具:
sudo apt install python3-rosdep python3-rosinstall python3-rosinstall-generator python3-wstool build-essential
ROS 中使用许多工具前,要求需要初始化 rosdep (可以安装系统依赖) -- 上一步实现已经安装过了。
sudo apt install python3-rosdep
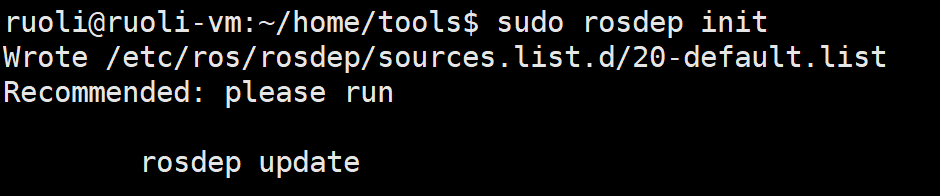
初始化 rosdep:
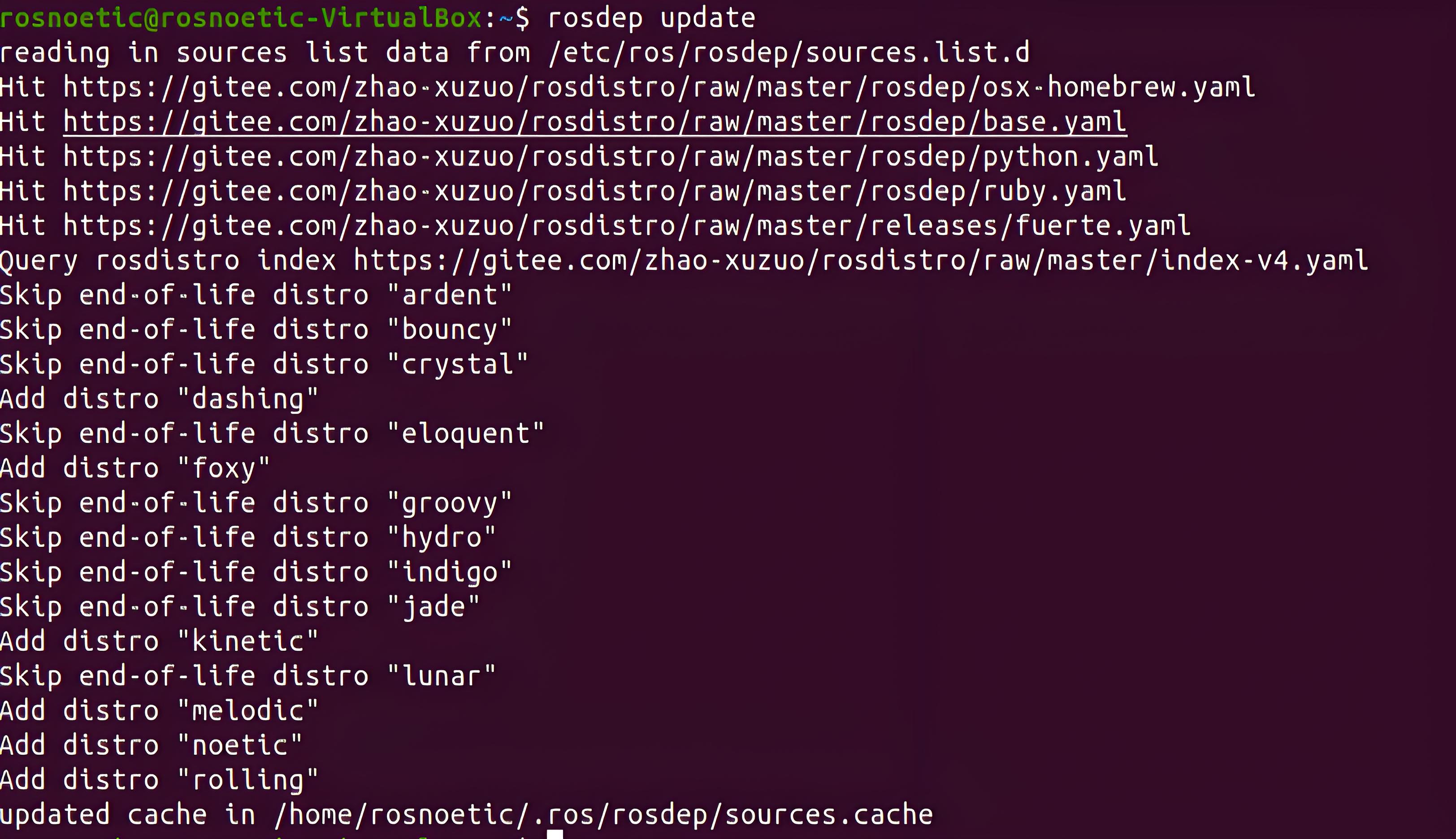
sudo rosdep init rosdep update
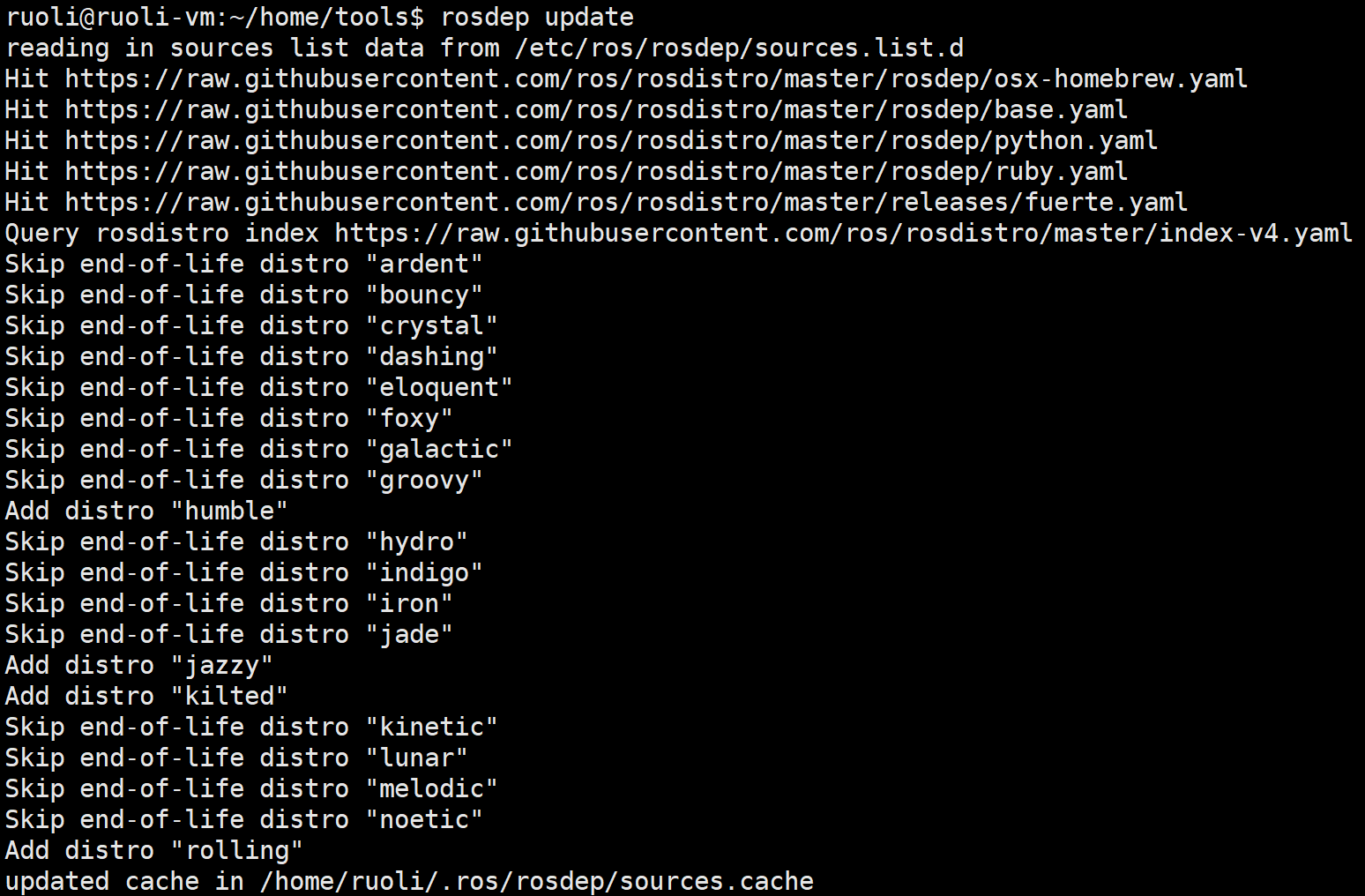
如果一切顺利的话,rosdep 初始化与更新的打印结果如下:

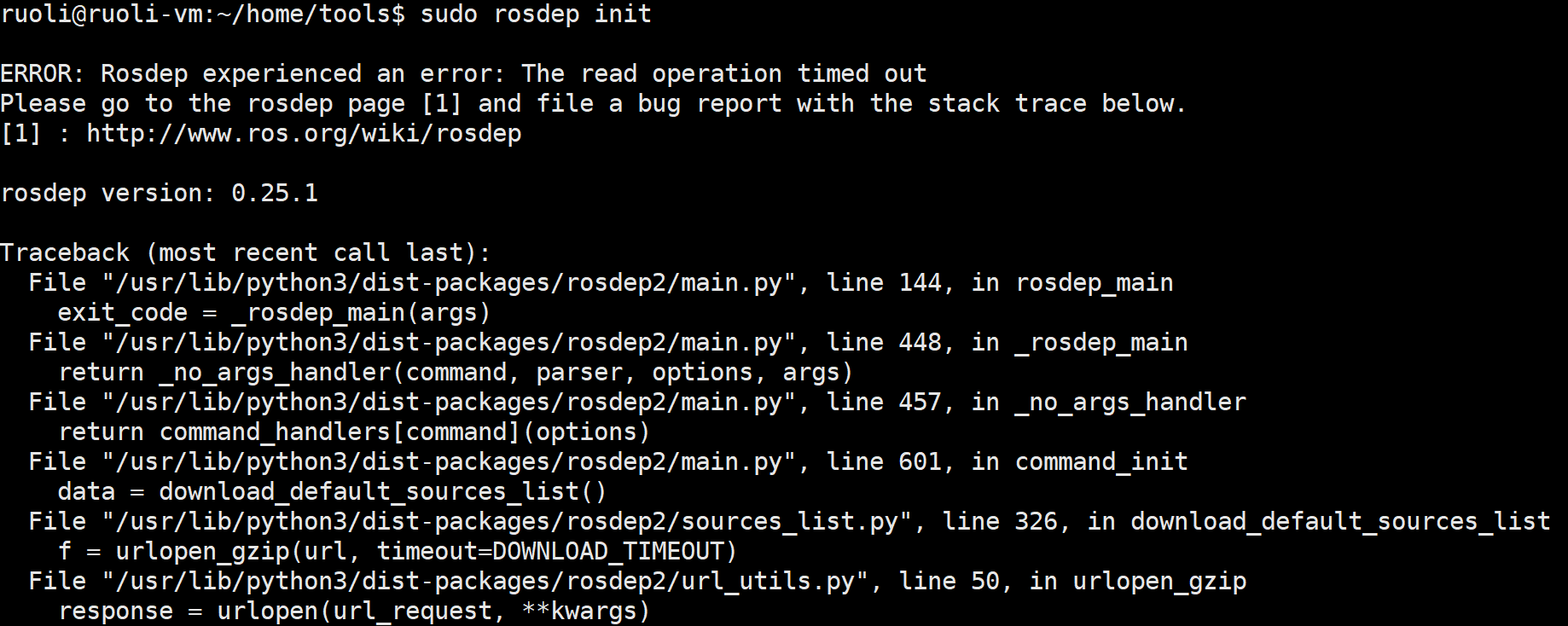
但是,在 rosdep 初始化时,多半会抛出异常。
出现问题: Rosdep experienced an error: The read operation timed out
解决方法:
wget -qO - https://raw.fastgit.org/my-rds-store/my_space/master/source/ros/shell/rosdep_repair.sh | bash
然后进行初始化:
然后更新,发现读取源列表超时,这是网络原因。

解决:
方法一:使用手机热点进行更新。
方法二:XX,模式设置为【全局模式】。
然后进行更新,此刻就能更新成功。
2.5 测试 ROS
ROS 内置了一些小程序,可以通过运行这些小程序以检测 ROS 环境是否可以正常运行
首先,启动三个命令行(ctrl + alt + T)
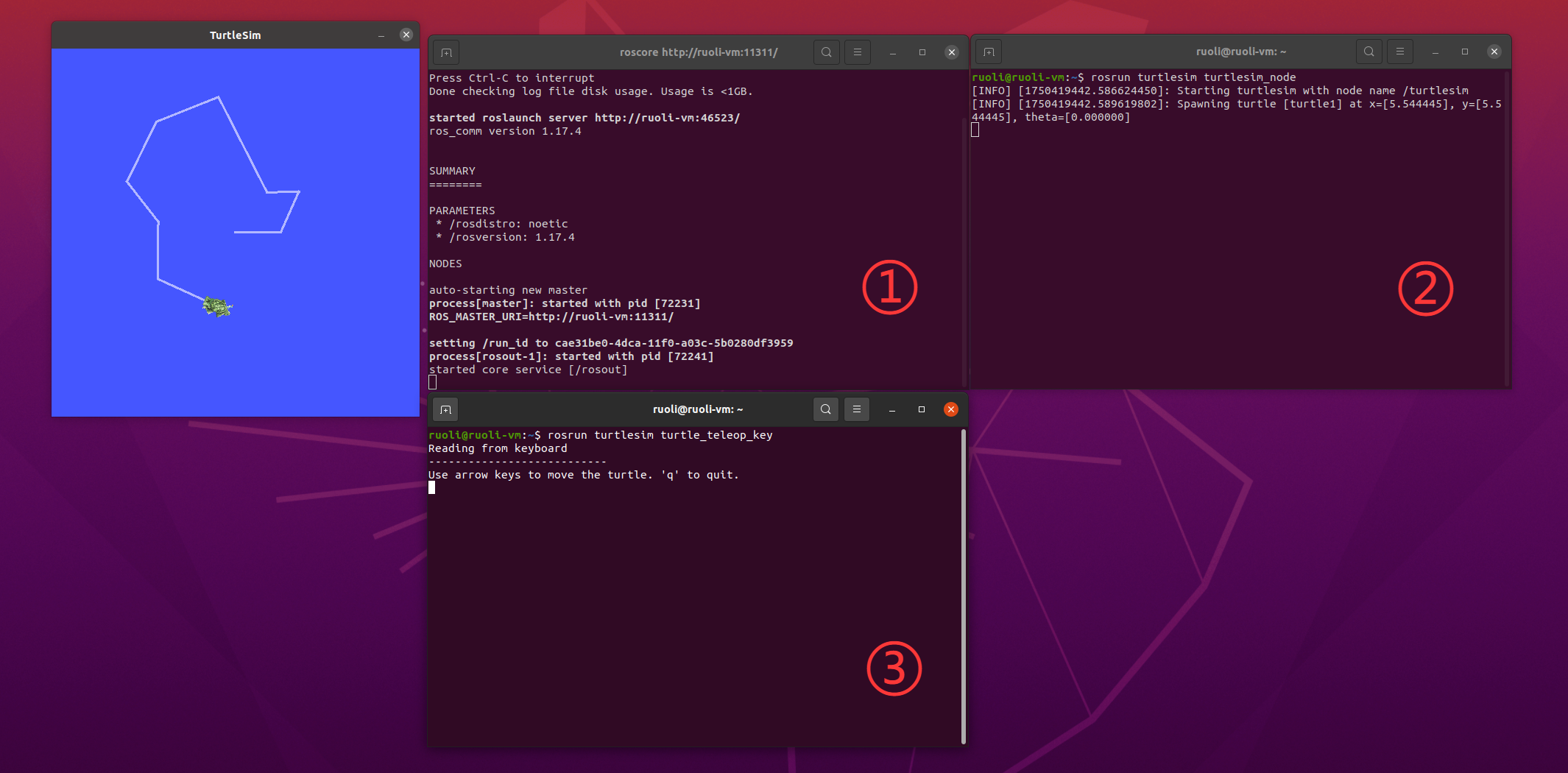
➹ 命令行【1】键入: roscore
➹ 命令行【2】键入: rosrun turtlesim turtlesim_node ,此时会弹出图形化界面。
➹ 命令行【3】键入: rosrun turtlesim turtle_teleop_key ,在【3】中可以通过上下左右控制【2】中乌龟的运动。
☛ 注意:光标必须聚焦在键盘控制窗口【3】,否则无法控制乌龟运动。
最终结果如下所示:
3. ROS 快速体验
编写 ROS 程序,在控制台输出文本: Hello World,分别使用 C++ 和 Python 实现。
3.1 Hello World 实现简介
ROS 中涉及的编程语言以 C++ 和 Python 为主,ROS 中的大多数程序两者都可以实现,在本系列教程中,每一个案例也都会分别使用 C++ 和 Python 两种方案演示,大家可以根据自身情况选择合适的实现方案。
ROS 中的程序即便使用不同的编程语言,实现流程也大致类似,以当前 Hello World 程序为例,实现流程大致如下:
① 先创建一个工作空间;
② 再创建一个功能包;
③ 编辑源文件;
④ 编辑配置文件;
⑤ 编译并执行。
上述流程中,C++ 和 Python 只是在步骤3和步骤4的实现细节上存在差异,其他流程基本一致。本节先实现 C++ 和 Python 程序编写的通用部分步骤1与步骤2,1.3.2节和1.3.3节再分别使用C++和Python编写HelloWorld。
3.1.1 创建工作空间并初始化
mkdir -p 自定义空间名称/src cd 自定义空间名称 catkin_make
上述命令,首先会创建一个工作空间以及一个 src 子目录,然后再进入工作空间调用 catkin_make 命令编译。
3.1.2 进入 src 创建 ros 包并添加依赖
cd src catkin_create_pkg 自定义ROS包名 roscpp rospy std_msgs
上述命令,会在工作空间下生成一个功能包,该功能包依赖于 roscpp、rospy 与 std_msgs,其中 roscpp 是使用 C++ 实现的库,而 rospy 则是使用 Python 实现的库,std_msgs 是标准消息库,创建 ROS 功能包时,一般都会依赖这三个库实现。
注意: 在 ROS 中,虽然实现同一功能时,C++ 和 Python 可以互换,但是具体选择哪种语言,需要视需求而定。两种语言相较而言: C++ 运行效率高但是编码效率低,而 Python 则反之。基于二者互补的特点,ROS 设计者分别设计了 roscpp 与 rospy 库,前者旨在成为 ROS 的高性能库,而后者则一般用于对性能无要求的场景,旨在提高开发效率。
3.2 HelloWorld(C++版)
我们已经创建了 ROS 的工作空间,并且创建了 ROS 的功能包,那么就可以进入核心步骤了,本节使用 C++ 编写程序实现 HelloWorld。
3.2.1 进入 ros 包的 src 目录编辑源文件
cd 自定义的包
创建 xxx.cpp 文件,文件名自定义,使用 vim 打开文件进行编辑。
C++源代码:
#include "ros/ros.h" int main(int argc, char *argv[])
{
//执行 ros 节点初始化
ros::init(argc,argv,"hello");
//创建 ros 节点句柄(非必须)
ros::NodeHandle n;
//控制台输出 hello world
ROS_INFO("hello world!"); return 0;
}
保存并退出。
3.2.2 编辑 ros 包下的 Cmakelist.txt 文件
add_executable(C++源文件名
src/C++源文件名.cpp
) target_link_libraries(C++源文件名
${catkin_LIBRARIES}
)
3.2.3 进入工作空间目录并编译
cd 自定义ros空间名称 catkin_make
生成 build devel ....
3.2.4 执行
终端1:先启动 ROS 核心
roscore
终端2:再启动节点
cd 工作空间 source ./devel/setup.bash rosrun 包名 C++节点名
命令行输出: HelloWorld!
PS:
source ~/工作空间/devel/setup.bash 可以添加进 .bashrc 文件,使用上更方便。
✎ 添加方式1:直接使用 gedit 或 vim 编辑 .bashrc 文件,最后添加该内容。
✎ 添加方式2: echo "source ~/工作空间/devel/setup.bash" >> ~/.bashrc
3.3 HelloWorld(Python版)
我们已经创建了 ROS 的工作空间,并且创建了 ROS 的功能包,那么就可以进入核心步骤了,本节使用 Python 编写程序实现:
3.3.1 进入 ros 包添加 scripts 目录并编辑 python 文件
cd ros包 mkdir scripts cd scripts
新建 python 文件,文件名自定义。
Python文件源代码:
#! /usr/bin/env python """
Python 版 HelloWorld
"""
import rospy if __name__ == "__main__":
rospy.init_node("Hello")
rospy.loginfo("Hello World!!!!")
3.3.2 为 python 文件添加可执行权限
chmod +x 自定义文件名.py
3.3.3 编辑 ros 包下的 CamkeList.txt 文件
catkin_install_python(PROGRAMS scripts/自定义文件名.py
DESTINATION ${CATKIN_PACKAGE_BIN_DESTINATION}
)
3.3.4 进入工作空间目录并编译
cd 自定义空间名称 catkin_make
3.3.5 进入工作空间目录并执行
终端1:先启动 ROS 核心
roscore
终端2:再启动节点
cd 工作空间 source ./devel/setup.bash rosrun 包名 自定义文件名.py
输出结果:Hello World!!!!
【机器人】—— 1. ROS 概述与环境搭建的更多相关文章
- 01_Struts2概述及环境搭建
1.Struts2概述: Struts2是一个用来开发MVC应用程序的框架. Struts2提供了web应用程序开发过程中一些常见问题的解决方案; 对用户输入的数据进行合法性验证 统一的布局 可扩展性 ...
- MyBatis01:框架概述、环境搭建及入门案例、自定义框架
课程介绍 第一天:mybatis的入门 mybatis的概述 mybatis的环境搭建 mybatis入门案例 自定义mybatis框架(目的:了解mybatis的执行细节) 第二天:mybatis基 ...
- 写给前端同学的C++入门教程(一):概述和环境搭建
说明:本人是前端er,因为最近对 UE4(一个游戏开发引擎)产生了兴趣,而这个引擎源开发游戏时需要用到 C++ ,所以就开始入坑 C++ 了.现将自己学习 C++ 的笔记整理并分享出来,以便一些想入门 ...
- MongoDB副本集学习(一):概述和环境搭建
MongoDB副本集概述 以下图片摘自MongoDB官方文档:http://docs.mongodb.org/manual/core/replication-introduction/ Primary ...
- 接口自动化:HttpClient + TestNG + Java(一) - 接口测试概述+自动化环境搭建
1.1 接口测试简介 1.1.1 什么是接口测试 开始学习接口自动化测试之前,我们先要来了解什么是接口,以及什么是接口测试. 我们都知道,测试从级别上划分可以分为 组件测试 集成测试 系统测试 验收测 ...
- Bootstrap(1) 概述与环境搭建
视频教程:http://study.163.com/course/courseMain.htm?courseId=1017002 源码和笔记:http://pan.baidu.com/s/1c06Ri ...
- Linux入门第一天——基本概述与环境搭建
一.Linux简介 1.历史 Linux内核最初只是由芬兰人李纳斯·托瓦兹(Linus Torvalds)在赫尔辛基大学上学时出于个人爱好而编写的. Linux是一套免费使用和自由传播的类Unix操 ...
- 001_Java概述与环境搭建
Java由来: SUN公司开发,95年推出,96年推出JDK1.0版本 09年被Oracle(甲骨文)收购 詹姆斯·高斯林被称作“Java之父” JavaSE:Java Standard Editoi ...
- SLAM+语音机器人DIY系列:(五)树莓派3开发环境搭建——1.安装系统ubuntu_mate_16.04
摘要 通过前面一系列的铺垫,相信大家对整个miiboo机器人的DIY有了一个清晰整体的认识.接下来就正式进入机器人大脑(嵌入式主板:树莓派3)的开发.本章将从树莓派3的开发环境搭建入手,为后续ros开 ...
- [转]Ubuntu下ROS开发环境搭建(QT+ros_qtc_plugin)
ROS与C++入门教程-搭建开发环境(QT+ros_qtc_plugin) PS : 在“安装ros_qtc_plugin插件”这一步中,原文提到“ Ubuntu 14.04使用apt-get方式安装 ...
随机推荐
- 什么是MIME类型-基础知识补全
MIME类型(Multipurpose Internet Mail Extensions,多用途互联网邮件扩展)是一种标准,用于标识互联网上传输的文件类型.它最初是为电子邮件设计的,后来被广泛应用于W ...
- 请运行命令来卸载Oracle主目录
卸载Oracle数据库碰见的一个不一样的操作,留爪. 正常点的软件卸载直接点卸载即可, Oracle 卸载非要来点不一样警告, 如图: 注意:不要被图里的斜杠符号忽略了,准确的应该是: # 注意斜杠 ...
- Golang 301永久重定向
比如我要把www.taadis.com永久重定向到taadis.com //main.go package main import ( "log" "net/http&q ...
- 课程上线:面向 AI 编程 | Semantic Kernel 从入门到精通
课程计划 本课程设计不低于50课时,目前已录制44课时,已在2025-3-15日发布上线,未完课时将尽快录制发布.点击下方链接可在线试看购买: B 站课堂| Semantic Kernel 从入门到精 ...
- SpringMvc怎么样把数据带给页面
例子. /** * SpringMVC除过在方法上传入原生的request和session外还能怎么样把数据带给页面 * * 1).可以在方法处传入Map.或者Model或者ModelMap. * 给 ...
- 再谈kettle两种循环之--调用http分页接口循环获取数据
再谈kettle两种循环之 – 调用http分页接口循环获取数据 1.场景介绍: 由于数据量比较大,接口有返回限制,需要用到循环分页获取数据 2.案例适用范围: 循环job可参考,变量运用可参考,调用 ...
- AutoFac(三)——装配扫描(批量注册之扫描模块)
RegisterAssemblyModules() 模块扫描使用RegisterAssemblyModules()注册方法执行,该方法完全按照其名称执行.它扫描提供的Autofac模块的程序集,创建模 ...
- python 3 No module named ‘Crypto‘ 解决方案
pip3 install pycryptodome pip3 install crypto Pip3 install pycrypto 本机(mac)环境的解决方案: pip3 uninstall p ...
- SQL 强化练习 (一)
当然, 说明一下, 所有的内容都是网上搬砖的, 也是用作自己练习用的. 我觉得如何去写 sql 这个思考的过程, 远比最终写出来更重要, 毕竟, 我最近有在公司看到了 2000多行的一个 sql. 我 ...
- 『Plotly实战指南』--Plotly与Streamlit结合实战
关于Streamlit的介绍,可参考<玩转Streamlit>系列 在当今数据驱动的时代,快速构建交互式工具并直观地将数据分析结果交付给用户,已成为数据应用开发的核心需求. 无论是企业内部 ...