OpenCV特征点检测
特征点检测
目标
在本教程中,我们将涉及:
- 使用 FeatureDetector 接口来发现感兴趣点。特别地:
- 使用 SurfFeatureDetector 以及它的函数 detect 来实现检测过程
- 使用函数 drawKeypoints 来绘制检测到的关键点
理论
代码
这个教程的代码如下所示。你还可以从 这个链接下载到源代码
#include <stdio.h>
#include <iostream>
#include "opencv2/core/core.hpp"
#include "opencv2/features2d/features2d.hpp"
#include "opencv2/highgui/highgui.hpp" using namespace cv; void readme(); /** @function main */
int main( int argc, char** argv )
{
if( argc != 3 )
{ readme(); return -1; } Mat img_1 = imread( argv[1], CV_LOAD_IMAGE_GRAYSCALE );
Mat img_2 = imread( argv[2], CV_LOAD_IMAGE_GRAYSCALE ); if( !img_1.data || !img_2.data )
{ std::cout<< " --(!) Error reading images " << std::endl; return -1; } //-- Step 1: Detect the keypoints using SURF Detector
int minHessian = 400; SurfFeatureDetector detector( minHessian ); std::vector<KeyPoint> keypoints_1, keypoints_2; detector.detect( img_1, keypoints_1 );
detector.detect( img_2, keypoints_2 ); //-- Draw keypoints
Mat img_keypoints_1; Mat img_keypoints_2; drawKeypoints( img_1, keypoints_1, img_keypoints_1, Scalar::all(-1), DrawMatchesFlags::DEFAULT );
drawKeypoints( img_2, keypoints_2, img_keypoints_2, Scalar::all(-1), DrawMatchesFlags::DEFAULT ); //-- Show detected (drawn) keypoints
imshow("Keypoints 1", img_keypoints_1 );
imshow("Keypoints 2", img_keypoints_2 ); waitKey(0); return 0;
} /** @function readme */
void readme()
{ std::cout << " Usage: ./SURF_detector <img1> <img2>" << std::endl; }
解释
结果
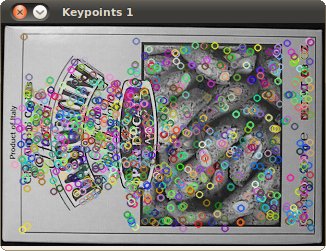
这是第一张图的特征点检测结果:
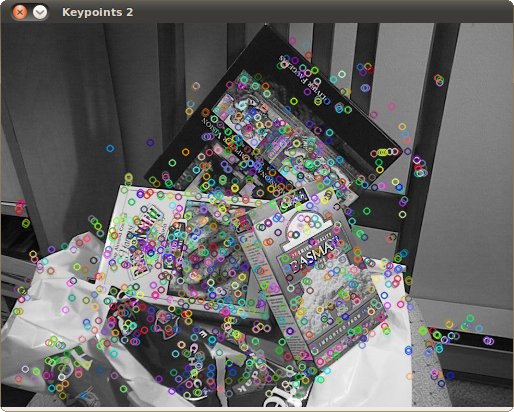
这是第二张图的特征点检测:
翻译者
Shuai Zheng, <kylezheng04@gmail.com>, http://www.cbsr.ia.ac.cn/users/szheng/
from: http://www.opencv.org.cn/opencvdoc/2.3.2/html/doc/tutorials/features2d/feature_detection/feature_detection.html#feature-detection
OpenCV特征点检测的更多相关文章
- OpenCV特征点检测------ORB特征
OpenCV特征点检测------ORB特征 ORB是是ORiented Brief的简称.ORB的描述在下面文章中: Ethan Rublee and Vincent Rabaud and Kurt ...
- python+OpenCV 特征点检测
1.Harris角点检测 Harris角点检测算法是一个极为简单的角点检测算法,该算法在1988年就被发明了,算法的主要思想是如果像素周围显示存在多于一个方向的边,我们认为该点为兴趣点.基本原理是根据 ...
- OpenCV特征点检测匹配图像-----添加包围盒
最终效果: 其实这个小功能非常有用,甚至加上只有给人感觉好像人脸检测,目标检测直接成了demo了,主要代码如下: // localize the object std::vector<Point ...
- OpenCV特征点检测------Surf(特征点篇)
Surf(Speed Up Robust Feature) Surf算法的原理 ...
- OpenCV特征点检测——Surf(特征点篇)&flann
学习OpenCV--Surf(特征点篇)&flann 分类: OpenCV特征篇计算机视觉 2012-04-20 21:55 19887人阅读评论(20)收藏举报 检测特征 Surf(Spee ...
- OpenCV特征点检测——ORB特征
ORB算法 目录(?)[+] 什么是ORB 如何解决旋转不变性 如何解决对噪声敏感的问题 关于尺度不变性 关于计算速度 关于性能 Related posts 什么是ORB 七 4 Ye ...
- OpenCV特征点检测算法对比
识别算法概述: SIFT/SURF基于灰度图, 一.首先建立图像金字塔,形成三维的图像空间,通过Hessian矩阵获取每一层的局部极大值,然后进行在极值点周围26个点进行NMS,从而得到粗略的特征点, ...
- OpenCV 特征点检测
#include <stdio.h> #include <iostream> #include "opencv2/core/core.hpp" #inclu ...
- OPENCV图像特征点检测与FAST检测算法
前面描述角点检测的时候说到,角点其实也是一种图像特征点,对于一张图像来说,特征点分为三种形式包括边缘,焦点和斑点,在OPENCV中,加上角点检测,总共提供了以下的图像特征点检测方法 FAST SURF ...
随机推荐
- CSS3–2.css3 响应式布局
1.响应式布局 响应式布局是现在很流行的一个设计理念,随着移动互联网的盛行,为解决如今各式各样的浏览器分辨率以及不同移动设备的显示效果,设计师提出了响应式布局的设计方案.所谓的响应式布局,就是一个网站 ...
- Solr本地服务器搭建及查询
0.安装solr之前,确保已安装好java8, java -version 查看是否安装 1.新建本地目录solr1 并 解压两个压缩包文件 .tar.gz .tgz tomcat7 2.将CATA ...
- python开发学习-day04(迭代器、生成器、装饰器、二分查找、正则)
s12-20160123-day04 *:first-child { margin-top: 0 !important; } body>*:last-child { margin-bottom: ...
- css 画的动画表情
<!DOCTYPE html> <html lang="en"> <head> <meta charset="UTF-8&quo ...
- LoadRunner项目结合抓包工具
LoadRunner项目结合抓包工具 常见的抓包工具包括: 1. Http协议 报文分为"请求","应答"两大类. 请求: 方法-URL-协议/版本 ...
- Android中由Handler和内部类引起的内存泄漏
原文地址:http://johnnyshieh.github.io/android/2015/09/03/android-handler-memory-leak/ 在Android中我们经常用Hand ...
- 实现RMQ的两种常用方法
RMQ RMQ(Range Maximum/Minimum Question)是指区间最值问题,在OI中较为常见,一般可以用ST表和线段树实现. ST表是基于倍增思想的一种打表方法,在确定区间范围和所 ...
- 通过JS实现HTML的转义与反转义
function HTMLEncode(html) { var temp = document.createElement("div"); (temp.textContent != ...
- hdu 1058 dp.Humble Numbers
Humble Numbers Time Limit:1000MS Memory Limit:32768KB 64bit IO Format:%I64d & %I64u Subm ...
- Hibernate 条件-分页查询
这里我们继续跟着上一次的节奏继续学习Hibernate的查询. 1.条件查询一(占位符) 按照占位符的方式进行条件查询,这里query有一个setInteger(arg1, arg2)方法,其中第一个 ...