AnyLabeling标定及转化成labelmaskID
一、标定工具
在进行分割任务时,对分割工具进行预研和验证,现在AI辅助标定已经成熟,目标则是利用sam进行辅助标定。调研的三款标定工具情况如下:
- labelme:可以加载sam,但是在进行辅助标定后,对图像质量要求较高,真心不好用。主要体现在辅助标定后,无法调整。
- cvat:本地部署手工标注成功了,但在部署辅助标定时,按照教程各种失败,最后放弃了。从宣传效果上看起来挺好用,尤其团队能工作分工合作。
- x-Anylabeling:部署简单,在Windows有执行程序,当然还支持加载自己的模型(此处需要源码安装)。在加载sam模型后,通过point+/point-等操作能细化调整标定框,真心好用。后续直接用anylabeling进行标注了。
另外在通用检测模型中,尝试了大部分模型有较大优化空间,当然希望集成按照label进行目标标定,而不是点击“run”后所有目标都进行标定。当然自己后续可以通过脚本处理也是没有问题的。
二、标定json文件转化为maskID
在训练时使用的时mmsegmention,模型输入是原始图片和maskID,为此需要将标定后的json文件转化为maskID。anylabeling是参考labelme的输出格式相同,当然在anylabeling中有脚本为:polygon_mask_conversion.py,其中的核心代码为:
def polygon_to_mask(self, img_file, mask_file, json_file):
with open(json_file, 'r') as f:
data = json.load(f)
polygons = []
for shape in data['shapes']:
points = shape['points']
polygon = []
for point in points:
x, y = point
polygon.append((x, y))
polygons.append(polygon)
image_width, image_height = self.get_image_size(img_file)
image_shape = (image_height, image_width)
binary_mask = np.zeros(image_shape, dtype=np.uint8)
for polygon_points in polygons:
np_polygon = np.array(polygon_points, np.int32)
np_polygon = np_polygon.reshape((-1, 1, 2))
#只是将区域内设置为255
cv2.fillPoly(binary_mask, [np_polygon], color=255)
cv2.imwrite(mask_file, binary_mask)
里面只是将poly区域内设置为255,则效果图为:
则不符合要求。
答案代码如下:
def main():
parser = argparse.ArgumentParser(
formatter_class=argparse.ArgumentDefaultsHelpFormatter
)
parser.add_argument("input_dir", help="input annotated directory")
parser.add_argument("output_dir", help="output dataset directory")
args = parser.parse_args()
if not osp.exists(args.output_dir):
os.makedirs(args.output_dir)
file_list = [i for i in os.listdir(args.input_dir) if i.endswith("json")]
for file in file_list:
file_name = os.path.join(args.input_dir, file)
json_data = json.load(open(file_name))
height, width = json_data["imageHeight"], json_data["imageWidth"]
#核心代码是labelme实现的,直接调用即可
lbl, lbl_names = utils.shape.labelme_shapes_to_label([height, width], json_data['shapes'])
out_file = osp.join(args.output_dir, '{}.png'.format(os.path.basename(file)))
lbl_pil = Image.fromarray(lbl.astype(np.uint8), mode="P")
lbl_pil.save(out_file)
# utils.lblsave(out_file, lbl)
print('Saved to: %s' % out_file)
核心代码可以去labelme寻找答案。在保存后,效果图如下:
因为数值是1,2,3所以全是黑色,此时要实现将像素值打印在图片上。
三、像素值打印在图片上
在打印上如果每个像素都打上数字,因为像素位置挨着近,数字小,则无法看出,此时需要进行临近区域处理,具体的代码为:
def check_mask():
parser = argparse.ArgumentParser(
formatter_class=argparse.ArgumentDefaultsHelpFormatter
)
parser.add_argument("input_dir", help="input annotated directory")
args = parser.parse_args()
file_list = [i for i in os.listdir(args.input_dir) if i.endswith("png")]
file_name = os.path.join(args.input_dir, file_list[0])
image = Image.open(file_name)
image = image.convert("RGB")
# 获取图片的像素数据
pixels = list(image.getdata())
# 创建一个可以在图像上绘制文本的对象
draw = ImageDraw.Draw(image)
# 设置字体和字体大小
font = ImageFont.truetype("arial.ttf", size=12) # 这里使用了Arial字体,你可以替换为其他字体
# 设置绘制像素值的间隔(每隔多少个像素绘制一次)
interval = 10
# 合并像素值的范围(以此范围内的像素值取平均值并绘制)
merge_range = 5
# 在图像上绘制像素值
for y in range(image.height):
for x in range(image.width):
if x % interval == 0 and y % interval == 0:
# 计算合并范围内像素的平均值
total= 0
count = 0
for i in range(-merge_range, merge_range + 1):
for j in range(-merge_range, merge_range + 1):
nx, ny = x + i, y + j
if 0 <= nx < image.width and 0 <= ny < image.height:
pixel = pixels[ny * image.width + nx]
total += pixel[0]
count += 1
# 计算平均值
if count > 0:
avg = total // count
if avg == 0:
continue
pixel_str = str(avg) # 格式化平均像素值
draw.text((x, y), pixel_str, fill=(255, 0, 0), font=font) # 在图像上绘制文本,使用黑色文本颜色
output_path = "output_image.jpg" # 保存的图片路径
image.save(output_path, "JPEG")
效果图如下:
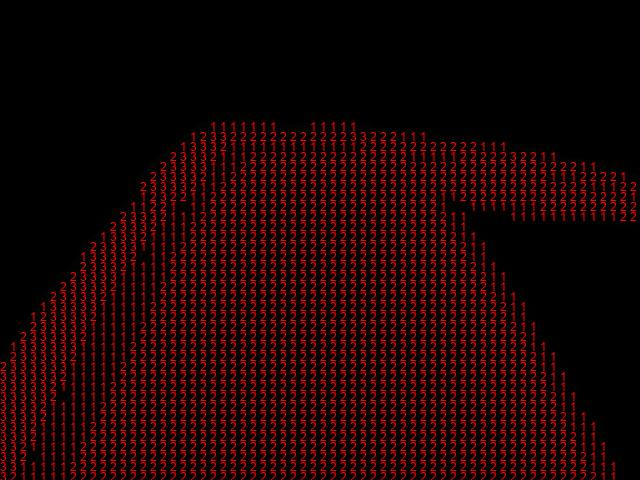
如此便将像素值打印在图片上了。
四、总结
在maskID中,如果调用
utils.lblsave(out_file, lbl)
里面的核心代码是:
def lblsave(filename, lbl):
import imgviz
if osp.splitext(filename)[1] != ".png":
filename += ".png"
# Assume label ranses [-1, 254] for int32,
# and [0, 255] for uint8 as VOC.
if lbl.min() >= -1 and lbl.max() < 255:
lbl_pil = PIL.Image.fromarray(lbl.astype(np.uint8), mode="P")
#增加了此处代码
colormap = imgviz.label_colormap()
lbl_pil.putpalette(colormap.flatten())
lbl_pil.save(filename)
else:
raise ValueError(
"[%s] Cannot save the pixel-wise class label as PNG. "
"Please consider using the .npy format." % filename
)
其结果为:
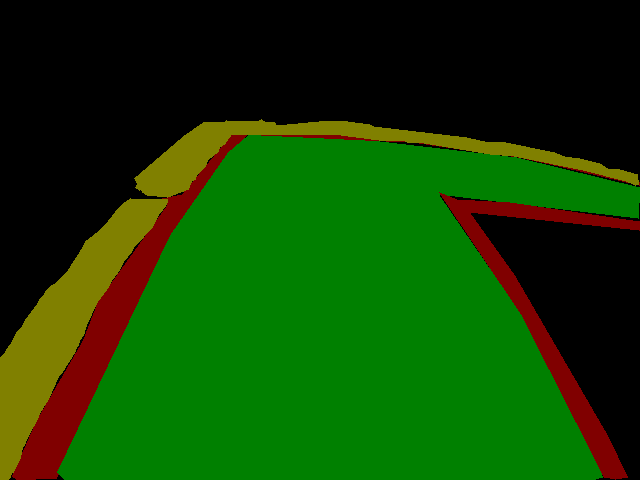
此时将像素打印在图片上结果是:

AnyLabeling标定及转化成labelmaskID的更多相关文章
- [zt]摄像机标定(Camera calibration)笔记
http://www.cnblogs.com/mfryf/archive/2012/03/31/2426324.html 一 作用建立3D到2D的映射关系,一旦标定后,对于一个摄像机内部参数K(光心焦 ...
- 直接线性变换解法(DLT)用于标定相机
直接线性变换法是建立像点坐标和相应物点物方空间坐标之间直接的线性关系的算法.特点:不需要内外方位元素:适合于非量测相机:满足中.低精度的测量任务:可以标定单个相机. 1 各坐标系之间的关系推导直接线性 ...
- PPT转化成Image、PPTX、XPS、EMF
最近工作经常用到演示文稿,接触到了一款不错的免费软件—Free Spire.Presentation.使用之后发现这款软件非常轻巧,功能还挺齐全.这款软件的转化功能也是非常不错的,平时遇到的各种转换难 ...
- DSO之光度标定
光度标定(Photometric Camera Calibration)是DSO(Direct Sparse Odometry)论文中比较特别的一部分.常规的vSLAM不太考虑光度标定的问题.比如基于 ...
- 相机标定简介与MatLab相机标定工具箱的使用(未涉及原理公式推导)
相机标定 一.相机标定的目的 确定空间物体表面某点的三维几何位置与其在图像中对应点之间的相互关系,建立摄像机成像的几何模型,这些几何模型参数就是摄像机参数. 二.通用摄像机模型 世界坐标系.摄像机坐标 ...
- .net 将List序列化成Json字符串
将List类型转化为Json,是我们平常开发时最常见的了.在使用中,有很多种方法,也可以使用. 第一种 第三方组件:Newtonsoft.Json.dll //转化成Json Newtonsoft.J ...
- LL谱面分析和难度标定
LL谱面分析和难度标定 先介绍一下LL谱面的存储方式:TimeLine序列(简称TL序列),TL序列中的每一个元素(即音符)可以由一个C语言中的结构体来表示: struct note{ int lin ...
- [转]opencv3.0 鱼眼相机标定
[原文转自]:http://blog.csdn.net/qq_15947787/article/details/51441031 前两天发表的时候没注意,代码出了点错误,所以修改了一下,重新发上来. ...
- 机器人操作臂运动学入门一--D-H参数标定
最近重新学习机器人方面的知识,想到一年以前在学校选修<机器人学技术基础>这门课的时候,老师虽然讲机器人的各个方面的知识都讲到了,但只是浮光绿影的的提到,并没有真正讲到深处,我的理解也没有更 ...
- 【图像】Matlab图像标定工具箱
参考教程: Matlab工具箱教程 http://www.vision.caltech.edu/bouguetj/calib_doc/ 摄像机模型 http://oliver.zheng.blog ...
随机推荐
- 从0搭建Vue3组件库(十三):引入Husky规范git提交
为什么要引入 husky? 虽然我们项目中引入了prettier和eslint对代码格式进行了校验,但是多人开发的时候难免依然会有人提交不符合规范的代码到仓库中,如果我们拉取到这种代码还得慢慢对其进行 ...
- 浙大Jarvisoj [XMAN]level6 Writeup
分析代码 初始化 0x0804A2EC:保存malloc(0xC10)返回的指针 malloc(0xC10) 0 1 ... ... value note 总数:256 已使用 note 数 0 一. ...
- ChatGPT 时代,程序员的生存之道 | 人工智能 AI
前言 ChatGPT 近期炙手可热,仿佛没有什么问题是它不能解决的.出于对 ChatGPT 的好奇,我们决定探索下它对于前端开发人员来讲,是作为辅助工具多一些,还是主力工具更多一些? 2D 能力测试 ...
- Redis系列15:使用Stream实现消息队列(精讲)
Redis系列1:深刻理解高性能Redis的本质 Redis系列2:数据持久化提高可用性 Redis系列3:高可用之主从架构 Redis系列4:高可用之Sentinel(哨兵模式) Redis系列5: ...
- 【IntelliJ】添加javaweb、tomcat语法支持
默认情况下:idea不支持javaweb的语法 但,我们的期望是: 解决方法:配置tomcat如下: (假设你已经配置好了tomcat)接下来: 1.打开[项目结构(快捷键:Ctrl + Shift ...
- MVCC并发版本控制之重点ReadView
MVCC并发版本控制 本文大部分来自<MySQL是怎样运行的>,这里只是简单总结,用于各位回忆和复习. 版本链 对于使用 InnoDB 存储引擎的表来说,它的聚簇索引记录中都包含两个必要的 ...
- 浅析 Jetty 中的线程优化思路
作者:vivo 互联网服务器团队- Wang Ke 本文介绍了 Jetty 中 ManagedSelector 和 ExecutionStrategy 的设计实现,通过与原生 select 调用的对比 ...
- [ARM 汇编]高级部分—系统控制协处理器—3.2.3 控制寄存器的读写操作
在这一部分,我们将学习如何使用ARM汇编指令在系统控制协处理器(CP15)的控制寄存器上执行读写操作.我们将通过实例来讲解如何使用MCR(Move to Coprocessor Register)和M ...
- ThinkPHP6.0 链式SQL语句
ThinkPHP6.0 链式SQL语句 查询单个数据 $user = Db::query('select * from `user`'); $user=Db::table('user')->wh ...
- 企业级logstash简单使用(ELK)
企业级logstash简单使用(ELK) 要使用logstash收集到Elasticsearch的方式,需确保logstash版本与es版本一致. 由于我也是刚刚研究使用,所以本文暂不会出现原理性的东 ...