offline RL | 读读 Decision Transformer
- 论文标题:Decision Transformer: Reinforcement Learning via Sequence Modeling,NeurIPS 2021,6 6 7 9 poster(怎么才 poster)。
- pdf:https://arxiv.org/pdf/2106.01345.pdf
- html:https://ar5iv.labs.arxiv.org/html/2106.01345
- open review:https://openreview.net/forum?id=a7APmM4B9d
- 项目网站:https://sites.google.com/berkeley.edu/decision-transformer
- GitHub:https://github.com/kzl/decision-transformer
- 相关博客:
1 Transformer 是一种 seq2seq 建模方法
(著名的 GPT 的全称是 Generative Pre-trained Transformer)
学习 Transformer:
- 知乎问题 | 如何最简单、通俗地理解 Transformer?
- 知乎问题 | Transformer 的技术细节到底是怎么样的?
- 知乎问题 | 为什么我还是无法理解 Transformer?(回答 1)
- 知乎问题 | 为什么我还是无法理解 Transformer?(回答 2)
seq2seq 的输入输出:
- 在 nlp 领域貌似是 word embedding,然后再使用 word2vec 之类得到单词(?)
Attention 与 Transformer:
- attention:
- key query value:key 用来提取关键信息、query 用来提取查询、value 用来提取值。它们具有矩阵形式,用 k q v 矩阵去乘输入的 vector,得到 k q v 的 vector。
- k q v 举例:希望投票选举,query - 评委的重要程度、key - 评委的职称(?)、value - 评委的投票结果,最后按照 (query × key^T) × value 的形式,对投票结果进行加权计算。 multi-head-attention 就是使用多组 k q v,可能表示我们希望关注多个方面。
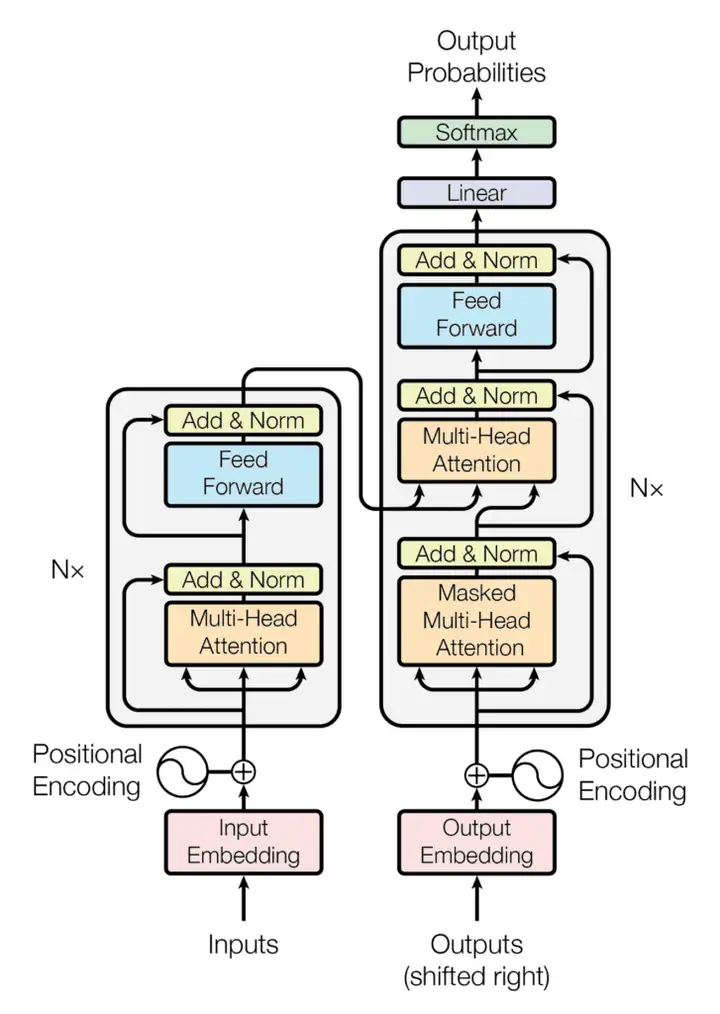
- encoder:
- 一个 encoder 块包含一个 attention + 一个 feed forward 层(大概就是全连接层)。
- 我们使用 k q v 的 attention 模块,一下对所有 token 的矩阵(维度 num of tokens × embedding size)得到一个 latent z(维度 num of tokens × latent size)。
- 然后对于每个原句子中的 token,各过各的全连接层(feed forward)(?)最后得到一个 维度 num of tokens × embedding size 的矩阵。
- 残差连接(Res):将输入和 多头注意力层 或全连接神经网络的输出 相加,再传递给下一层,避免梯度递减的问题。
- decoder:
- 一个 decoder 块包含两个 attention + 一个 feed forward 层。
- attention 1 用来处理自己输出的信息,因此它在说第 n 个单词之前,只能以自己说出的前 n-1 个单词作为输入,使用一个掩码(?)来实现:掩码多头自注意力(Masked-Multi-head self attention)。
- attention 2 用来处理 encoder 给出的 num of tokens × embedding size 的 embedding,attention 1 的输出也是其输入的一部分。
- 这样,看图应该就能看懂了。
2 建模 RL 的 sequence
我们的 sequence:{return-to-go, state, action, return-to-go, ...}
- 形式类似于 \(\{s_t,a_t,r_t,s_{t+1},\cdots\}\) 。
- return-to-go: \(\hat R_t=\sum_{t'=t}^Tr_{t'}\) ,是从此刻 t 到 episode 结束的,in-discounted reward 的加和。
- 感觉 return-to-go 类似于 HER 的预期目标,比较 hindsight。
3 如何训练 DT
对 sequence {s, a, R, s, a, R, ...} 进行处理:
- 对每个 modality(s a R),都学习了将它们转换为 embedding 的线性层。
- 对于具有视觉输入的环境,状态被输入到卷积编码器而不是线性层中。
- 此外,每个时间步的 embedding 都会被学习并添加到每个 token 中 —— 这与 transformer 使用的 positional embedding(三角函数?)不同,因为一个时间步对应于三个 token。
(搬图,搬运文字说明)
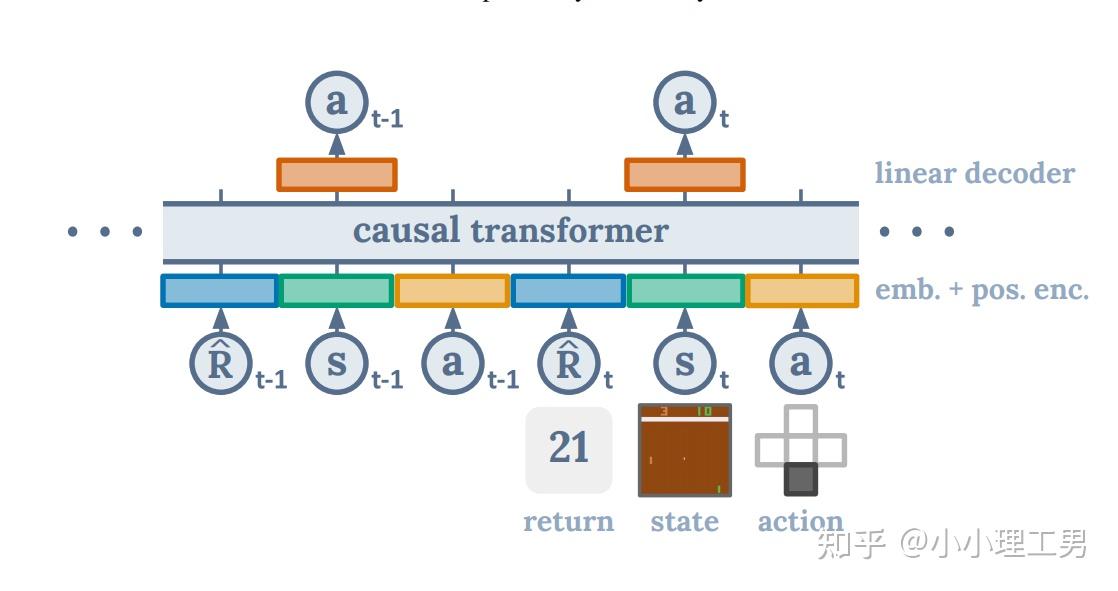
- 一条轨迹按照 s a R 顺序排列好后,每个元素都是图 1 下部的一个小圆圈,类似于 NLP 中的一个个单词。
- 然后,每个元素经过一个 mlp 做 embedding 后,再加上 position encoding,就得到了 tokens,也就是图 1 下部的一个个五颜六色的小长方块。
训练:
- 使用 offline trajectory 的 dataset(D4RL 之类)。
- 从离线轨迹数据集中,抽取 sequence 长度为 K 的 minibatch。
- 训练:对 input token \(s_t\) 的那个 prediction head,再加一个 mlp 来预测 \(a_t\) (上图上部输出 \(a_t\) 的橙色方块)。
- 训 action 时,对离散动作使用 cross-entropy loss,连续则使用 MSE。
- DT 每隔三个 token 才 decode 一个,因为作为 policy 只需要输出 action。但其实,output tokens 由对应 return-to-go、state、action 的 token 组成,所以自然只留下对应 action 的 tokens(?)
- 发现,去预测 state 或 return-to-go 并不能提高性能,尽管在 DT 框架里,很容易这么做。
- 上述训练部分是想让 DT 学会,在某个特定状态 s 下,达到 return-to-go R,所需要做的动作 a。
- 详见 Algorithm 1 伪代码,感觉写的很清楚。
4 如何部署 DT policy / 如何 inference
- inference 过程就是,首先提出一个 target return(我们希望 agent 在一个 episode 里能达到的 return),作为初始的 return-to-go,然后 DT 按照训练过程中学到的 如何达成 return-to-go 的方法,选择 action。
- 每走一步,就将上一步的 return-to-go 减去这一步的 reward,得到下一个 return-to-go,从而不断地更新我们期望 DT 达到的 return 目标,同时 DT 根据我们的目标,不断选择 action。
- 详见 Algorithm 1 伪代码。
- evaluate 时,只保留 length = K 的 context,对应于前面训练时 sequence length = K。
- 通常认为,当使用 frame stacking(Atari 的帧堆叠)时,K = 1 已经 MDP,足以用于 RL 算法。然而,当 K = 1 时,Decision Transformer 的性能明显更差,这表明过去的信息对 Atari 游戏有用(非 MDP?)。(具体实验中,Atari 的 K = 30 50,MuJoco 的 K = 5 20)
- 一个假设是,当我们表示 一些策略的分布时(例如序列建模),上下文允许 transformer 识别,哪个策略生成了该动作,从而实现更好的学习和 / 或改进训练动态。
5 技术细节
- 训练的一些超参数,encoder / decoder:可参见 Table 8 9。
- 在 inference 过程中,如何选择 return-to-go:使用 dataset 中最大 return 的一倍或 5 倍。
- Warmup tokens 为 512 ∗ 20,是 <begin> <end> 这种 token 嘛?
6 一些讨论
- (Section 5.7)DT 为什么不需要 pessimistic value 或行为正则化?作者猜想:pessimistic value 和行为正则化是为了避免 value function approximation 带来的问题,但 DT 并不需要显式优化一个函数(?)
- (Section 5.8)声称 DT + Go-Explore(RL exploration 方法,感觉像打表)可以帮助 online policy。
- Credit assignment 貌似是一类工作,通过分解 reward function,使得某些“重要”状态包含了大部分 credit。
offline RL | 读读 Decision Transformer的更多相关文章
- 论文笔记之:Learning to Track: Online Multi-Object Tracking by Decision Making
Learning to Track: Online Multi-Object Tracking by Decision Making ICCV 2015 本文主要是研究多目标跟踪,而 online ...
- 深度强化学习(Deep Reinforcement Learning)入门:RL base & DQN-DDPG-A3C introduction
转自https://zhuanlan.zhihu.com/p/25239682 过去的一段时间在深度强化学习领域投入了不少精力,工作中也在应用DRL解决业务问题.子曰:温故而知新,在进一步深入研究和应 ...
- OAF_文件系列6_实现OAF导出XML文件javax.xml.parsers/transformer(案例)
20150803 Created By BaoXinjian
- (zhuan) 一些RL的文献(及笔记)
一些RL的文献(及笔记) copy from: https://zhuanlan.zhihu.com/p/25770890 Introductions Introduction to reinfor ...
- 【HEVC帧间预测论文】P1.5 Fast Coding Unit Size Selection for HEVC based on Bayesian Decision Rule
Fast Coding Unit Size Selection for HEVC based on Bayesian Decision Rule <HEVC标准介绍.HEVC帧间预测论文笔记&g ...
- 深度学习-强化学习(RL)概述笔记
强化学习(Reinforcement Learning)简介 强化学习是机器学习中的一个领域,强调如何基于环境而行动,以取得最大化的预期利益.其灵感来源于心理学中的行为主义理论,即有机体如何在环境给予 ...
- (转)RL — Policy Gradient Explained
RL — Policy Gradient Explained 2019-05-02 21:12:57 This blog is copied from: https://medium.com/@jon ...
- 【强化学习RL】必须知道的基础概念和MDP
本系列强化学习内容来源自对David Silver课程的学习 课程链接http://www0.cs.ucl.ac.uk/staff/D.Silver/web/Teaching.html 之前接触过RL ...
- [1] Multi-View Transformer for 3D Visual Grounding 论文精读
参考: https://zhuanlan.zhihu.com/p/467913475 3D Visual Grounding小白调研笔记 https://zhuanlan.zhihu.com/p/34 ...
- 多精度 simulator 中的 RL:一篇 14 年 ICRA 的古早论文
目录 全文快读 0 abstract 1 intro 2 related work 3 背景 & 假设 3.1 RL & KWIK(know what it knows)的背景 3.2 ...
随机推荐
- [转帖]linux shell 脚本一些主要知识点整理
文章目录 一./bin/sh 与 /bin/bash 的区别 二.vi与vim的区别 三.shell变量 四.Shell字符串 五.Shell函数 六.Shell基本运算符 1.Shell expr: ...
- 开源即时通讯(IM)项目OpenIM源码部署流程
由于 OpenIM 依赖的组件较多,开发者需求不一,导致 OpenIM 部署一直被人诟病,经过几次迭代优化,包括依赖的组件 compose 的一键部署,环境变量设置一次,全局生效,以及脚本重构,目前 ...
- 为mac搭建开发环境的笔记
公司的游戏项目需要出ios包上架到app store,由我负责接入ios的sdk,这里记录一下为mac搭建开发环境的笔记,大多是软件和编程习惯相关的内容. 常用软件 解压缩软件:bandizip在ma ...
- vim 从嫌弃到依赖(8)——使用命令模式编辑文本
通过前面的文章,我们已经介绍了vim的普通模式.插入模式.可视模式.接下来让我们接着介绍vim中另一个强大的模式--命令行模式 命令模式简介 命令模式可以说在vim中的使用频率不亚于普通模式,像我们平 ...
- RestTemplate-postForObject详解、调用Https接口、源码解析,读懂这一篇文章就够了
restTemplate 目录 restTemplate 1. 基本介绍 2. 常用方法分析及举例 2.1. get请求 2.2. post请求 3. springboot中使用restTemplat ...
- 深度学习应用篇-元学习[16]:基于模型的元学习-Learning to Learn优化策略、Meta-Learner LSTM
深度学习应用篇-元学习[16]:基于模型的元学习-Learning to Learn优化策略.Meta-Learner LSTM 1.Learning to Learn Learning to Lea ...
- 火遍外网的Keychron测评,带你入坑;ps马上5.20了送一个给你的心爱的她/他。
那些年用过的机械键盘 如果你经常上YouTube或Instagram,然后你又对键盘感兴趣,我相信你肯定看到过他--Keychron K2,他真的是一款曝光量很高的键盘. 1.键盘keychron k ...
- C/C++ 字符串拷贝处理
C语言的字符串操作 strtok 实现字符串切割: 将字符串根据分隔符进行切割分片. #include <stdio.h> int main(int argc, char* argv[]) ...
- 【题解】U405180 计算平方和
\(\bold{Part\ 0}\) 目录 \(/\ \bold{Contents}\) \(\bold{Part\ 1}\) 题目大意 \(/\ \bold{Item\ content}\) \(\ ...
- Kubernetes全栈架构师(Docker基础)--学习笔记
目录 Docker基础入门 Docker基本命令 Dockerfile用法 制作小镜像上 多阶段制作小镜像下 Scratch空镜像 Docker基础入门 Docker:它是一个开源的软件项目,在Lin ...