STM32 HAL库学习系列第5篇 定时器TIM---编码器接口模式配置
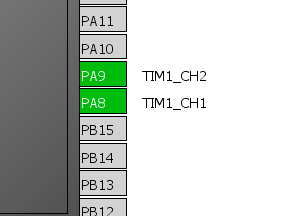
cube基本配置,外设开启编码器,串口2
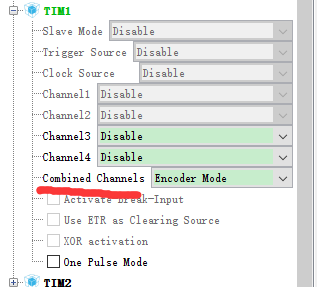
可能大家在设置的时候有这个错误
错误:error: #20: identifier "TIM_ICPOLARITY_BOTHEDGE" is undefined
意思是,高级、通用定时器不能用BothEdge,只有基本定时器才能用BothEdge
针对具体的芯片举几个例子:基本都是大同小异
F4系列:
/* 编码器初始化及使能编码器模式 */
ENCODER_TIMx_Init();
HAL_TIM_Encoder_Start(&htimx_Encoder, TIM_CHANNEL_ALL);
/* 获取捕获值并计算转速 */
CaptureNumber = ( int16_t )__HAL_TIM_GET_COUNTER(&htimx_Encoder)+OverflowCount*;
printf("输入捕获值:%d \n",CaptureNumber);
// 4 : 使用定时器编码器接口捕获AB相的上升沿和下降沿,一个脉冲*4.
// 11:编码器线数(转速一圈输出脉冲数)
// 34:电机减数比,内部电机转动圈数与电机输出轴转动圈数比,即减速齿轮比
printf("电机实际转动速度:%0.2f(圈/s)\n",(float)CaptureNumber///);
__HAL_TIM_SET_COUNTER(&htimx_Encoder,);
F1系列 输出方向与速度
/**
* 函数功能: 系统滴答定时器中断回调函数
* 输入参数: 无
* 返 回 值: 无
* 说 明: 每发生一次滴答定时器中断进入该回调函数一次
*/
void HAL_SYSTICK_Callback(void)
{
static uint32_t count=;
if(start_flag) // 等待脉冲输出后才开始计时
{
time_count++; // 每1ms自动增一
if(time_count==) // 1s
{
/* Get the current direction */
uwDirection = __HAL_TIM_IS_TIM_COUNTING_DOWN(&htimx_Encoder);
CaptureNumber=__HAL_TIM_GET_COUNTER(&htimx_Encoder); printf("当前编码器定时器计数方向:%d\n",uwDirection);
printf("输入捕获值:%d\n",CaptureNumber);
printf("1s内编码器计数值:%d\n",CaptureNumber>=count?CaptureNumber-count:CaptureNumber+-count); // 11:编码器线数(转速一圈输出脉冲数)
// 34:电机减数比,内部电机转动圈数与电机输出轴转动圈数比,即减速齿轮比
printf("电机实际转动速度:%0.2f(圈/s)\n",(float)(CaptureNumber>=count?CaptureNumber-count:CaptureNumber+-count)///);
count=CaptureNumber;
time_count=;
}
}
}
函数应用:
这个函数很好用,在电机控制时使用很多
__HAL_TIM_SET_COUNTER() 可以设置计数初值为需要的值,默认是0
增量式编码器四倍频:
确定编码器是多少线的,假设定时器分频为0; 则定时器计数为390*4 = 1560
中断配置:编码器模式是可以不需要中断的,主要是定时器1和8的配置
注意:这个是我实际遇到的问题,遇到的可以参考
编码器是否是OC(集电极开路)门,接了上拉没有,没有需要接上啦,如果不使用Z信号,需要把外部中断清零的那部分代码去掉
标准库配置可以参考:https://blog.csdn.net/wang328452854/article/details/50579832
STM32 HAL库学习系列第5篇 定时器TIM---编码器接口模式配置的更多相关文章
- STM32 HAL库学习系列第6篇---定时器TIM 级联配置
应用情景 使用定时器配置编码器模式,发现STM32只有两个定时器是32位,16位的测量值不够用,发现是可以使用两个16位定时器级联为32位的. 我是在使用编码器计数电机转速时使用,但是最终实现的效果不 ...
- STM32 HAL库学习系列第7篇---定时器TIM 输入捕获功能
测量脉冲宽度或者测量频率 基本方法 1.设置TIM2 CH1为输入捕获功能: 2.设置上升沿捕获: 3.使能TIM2 CH1捕获功能: 4.捕获到上升沿后,存入capture_buf[0], ...
- STM32 HAL库学习系列第4篇 定时器TIM----- 开始定时器与PWM输出配置
基本流程: 1.配置定时器 2.开启定时器 3.动态改变pwm输出,改变值 HAL_TIM_PWM_Start(&htim4, TIM_CHANNEL_1); 函数总结: __HAL_TIM ...
- STM32 HAL库学习系列第8篇---回调函数总结
普通函数与回调函数的区别:就是ST将中断封装,给使用者的API,就是标准库的中断函数 对普通函数的调用: 调用程序发出对普通函数的调用后,程序执行立即转向被调用函数执行,直到被调用函数执行完毕后,再返 ...
- STM32 HAL库学习系列第1篇 ADC配置 及 DAC配置
ADC工作均为非阻塞状态 轮询模式 中断模式 DMA模式 库函数: HAL_StatusTypeDef HAL_ADC_Start(ADC_HandleTypeDef* hadc);//轮询模式,需放 ...
- STM32 HAL库学习系列第3篇 常使用的几种延时方式
1 自带的hal_delay 函数 毫秒级延迟 void HAL_Delay(__IO uint32_t Delay) { uint32_t tickstart = HAL_GetTick( ...
- STM32 HAL库学习系列第2篇 GPIO配置
GPIO 库函数 基本就是使用以下几个函数 GPIO_PinState HAL_GPIO_ReadPin(GPIO_TypeDef* GPIOx, uint16_t GPIO_Pin); void H ...
- STM32 HAL库学习系列---定时器TIM 输入捕获功能
基本方法 1.设置TIM2 CH1为输入捕获功能: 2.设置上升沿捕获: 3.使能TIM2 CH1捕获功能: 4.捕获到上升沿后,存入capture_buf[0],改为捕获下降沿: 5.捕获到下降沿后 ...
- 【书籍连载】《STM32 HAL 库开发实战指南—基于F7》-第一章
从今天起,每天开始连载一章<STM32 HAL 库开发实战指南—基于F7>.欢迎各位阅读.点评.学习. 第1章 如何使用本书 1.1 本书的参考资料 本书参考资料为:<STM32 ...
随机推荐
- java笔记--String类对象解析与运用
--如果朋友您想转载本文章请注明转载地址"http://www.cnblogs.com/XHJT/p/3877236.html "谢谢-- 1.String中的equals和==的 ...
- 设计能长按并有动画效果且能触发事件的高级view
设计能长按并有动画效果且能触发事件的高级view 效果图: 源码: LongTapAnimationView.h 与 LongTapAnimationView.m // // LongTapAnima ...
- Emacs快捷键(较全)
C = Control M = Meta = Alt | Esc Del = Backspace 基本快捷键(Basic) C-x C-f "find"文件, 即在缓冲区打开/新建 ...
- Druid学习---配置_DruidDataSource参考配置
[更多参考]https://www.cnblogs.com/niejunlei/p/5977895.html 配置_DruidDataSource参考配置 以下是一个参考的连接池配置: <bea ...
- Thinkphp 漏洞小试
首先确定这个网站使用thinkphp的框架 国内很多php开源项目的代码都是使用thinkphp框架编写的,但是thinkphp框架有很多版本,如何才能知道我们使用的框架是哪个版本的呢? 在URL后面 ...
- 几个第三方yum源
1.repoforge 官方网站:http://repoforge.org/ 2.epel http://fedoraproject.org/wiki/EPEL 3.Remi http://rpms. ...
- MySQL5.7 不同操作系统下的主从配置
1. 服务器信息 1.1 Ubuntu 17.0.4 (Master服务器) MySQL版本: 5.7.20 主数据库:dslbcp IP: 192.168.12.130 3306 1.2 Wind ...
- Mysql中的char与varchar length()与char_length()
在mysql中,char和varchar都表示字符串类型.但他们存储和检索数据的方式并不相同. 在表结构定义中声明char和varchar类型时,必须指定字符串的长度.也就是该列所能存储多少个字符(不 ...
- Java并发案例02---生产者消费者问题
package example; import java.util.LinkedList; import java.util.concurrent.TimeUnit; public class MyC ...
- BZOJ3697:采药人的路径(点分治)
Description 采药人的药田是一个树状结构,每条路径上都种植着同种药材. 采药人以自己对药材独到的见解,对每种药材进行了分类.大致分为两类,一种是阴性的,一种是阳性的. 采药人每天都要进行采药 ...