【Matlab】简单的滑模控制程序及Simulink仿真
文章:
这篇文章仿真和输出U的推到有些问题,博主根据此篇文章进行修改进行对sin(t)曲线的追踪(使用滑模控制)
1.前言
最近开始了对滑模控制的学习,使用的书籍为刘金琨的《滑膜变结构控制MATLAB仿真》,今天是按照书上的例程做了一个简单的自适应控制系统。
2.程序解析
此程序中,电机控制系统的动态模型为:
 ,其中,θ为电机的角位置,J为转动惯量,d(t)为干扰且满足
,其中,θ为电机的角位置,J为转动惯量,d(t)为干扰且满足 ,η为干扰上界,
,η为干扰上界, 为角位置跟踪误差
为角位置跟踪误差
定义跟踪误差函数,也就是滑模面函数s为: ,当s=0时,有e和edot都为0,且是按照指数收敛:
,当s=0时,有e和edot都为0,且是按照指数收敛:
也就是说当时间趋于∞时,误差将指数收敛到0,收敛速度取决于c,所以误差函数s的收敛性意味着位置跟踪误差e和速度跟踪误差e'的收敛性,也就是说:s为滑膜函数。
2.1.控制器代码
首先是控制器的S函数。控制器就是系统的输入控制量u:
function [sys,x0,str,ts] = simple_adaptive_controller(t, x, u, flag)
switch flag,
case 0,
[sys,x0,str,ts]=mdlInitializeSizes; % 调用初始化子函数
case 1,
sys=[];
case 2,
sys=[];
case 3,
sys=mdlOutputs(t,x,u); %计算输出子函数
case 4,
sys=[]; %计算下一仿真时刻子函数
case 9,
sys=[]; %终止仿真子函数
otherwise
DAStudio.error('Simulink:blocks:unhandledFlag', num2str(flag)); end function [sys,x0,str,ts,simStateCompliance]=mdlInitializeSizes %初始化子函数 sizes = simsizes; sizes.NumContStates = 0; %连续状态变量个数
sizes.NumDiscStates = 0; %离散状态变量个数
sizes.NumOutputs = 1; %输出变量个数
sizes.NumInputs = 3; %输入变量个数
sizes.DirFeedthrough = 1; %输入信号是否在输出端出现
sizes.NumSampleTimes = 0; % at least one sample time is needed sys = simsizes(sizes);
x0 = []; %初始值
str = [];
ts = []; %[0 0]用于连续系统,[-1 0]表示继承其前的采样时间设置
simStateCompliance = 'UnknownSimState'; function sys=mdlOutputs(t,x,u) %计算输出子函数 J = 2;
thd = u(1);
th = u(2);
dth = u(3); e = th - thd;
de = dth;
c = 10;
s = c*e + de;
xite = 1.1; k = 0;
ut = J*(-c*dth-1/J*(k*s+xite*sign(s)));
sys(1) = ut;
因为控制器不涉及到复杂的微分运算,故只用在mdlOutputs中写控制输入u的代码
2.2.受控对象代码
本例中,受控对象为电机控制系统,,需要对这个微分方程进行描述,因为要用到θ、θ',虽然方程中有θ'',但是可以通过除以J得到θ''的表达式,故代码如下:
function [sys,x0,str,ts] = plant(t, x, u, flag)
switch flag,
case 0,
[sys,x0,str,ts]=mdlInitializeSizes; % 调用初始化子函数
case 1,
sys=mdlDerivatives(t,x,u); %调用计算微分子函数
case 2,
sys=[];
case 3,
sys=mdlOutputs(t,x,u); %计算输出子函数
case 4,
sys=[]; %计算下一仿真时刻子函数
case 9,
sys=[]; %终止仿真子函数
otherwise
DAStudio.error('Simulink:blocks:unhandledFlag', num2str(flag)); end function [sys,x0,str,ts,simStateCompliance]=mdlInitializeSizes %初始化子函数 sizes = simsizes; sizes.NumContStates = 2; %连续状态变量个数
sizes.NumDiscStates = 0; %离散状态变量个数
sizes.NumOutputs = 2; %输出变量个数
sizes.NumInputs = 1; %输入变量个数
sizes.DirFeedthrough = 0; %输入信号是否在输出端出现
sizes.NumSampleTimes = 1; % at least one sample time is needed sys = simsizes(sizes);
x0 = [0, 0]; %初始值
str = [];
ts = [0 0]; %[0 0]用于连续系统,[-1 0]表示继承其前的采样时间设置
simStateCompliance = 'UnknownSimState'; function sys = mdlDerivatives(t, x, u) %计算微分子函数
J = 2;
dt = sin(t);
ut = u(1);
sys(1) = x(2);
sys(2) = 1/J*(ut+dt); function sys=mdlOutputs(t,x,u) %计算输出子函数
sys(1) = x(1);
sys(2) = x(2);
3.仿真结果和Simulink注意事项
Simulink建立如下模型:
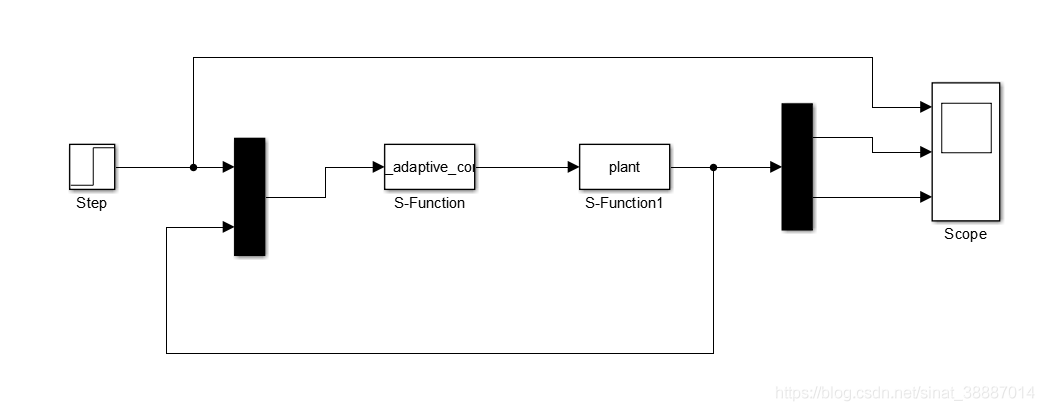
将微分方程算法换为定步长fixed step中的ode4!不然仿真超级慢!
具体分析可见:https://www.ilovematlab.cn/thread-260054-1-1.html
最后结果为:
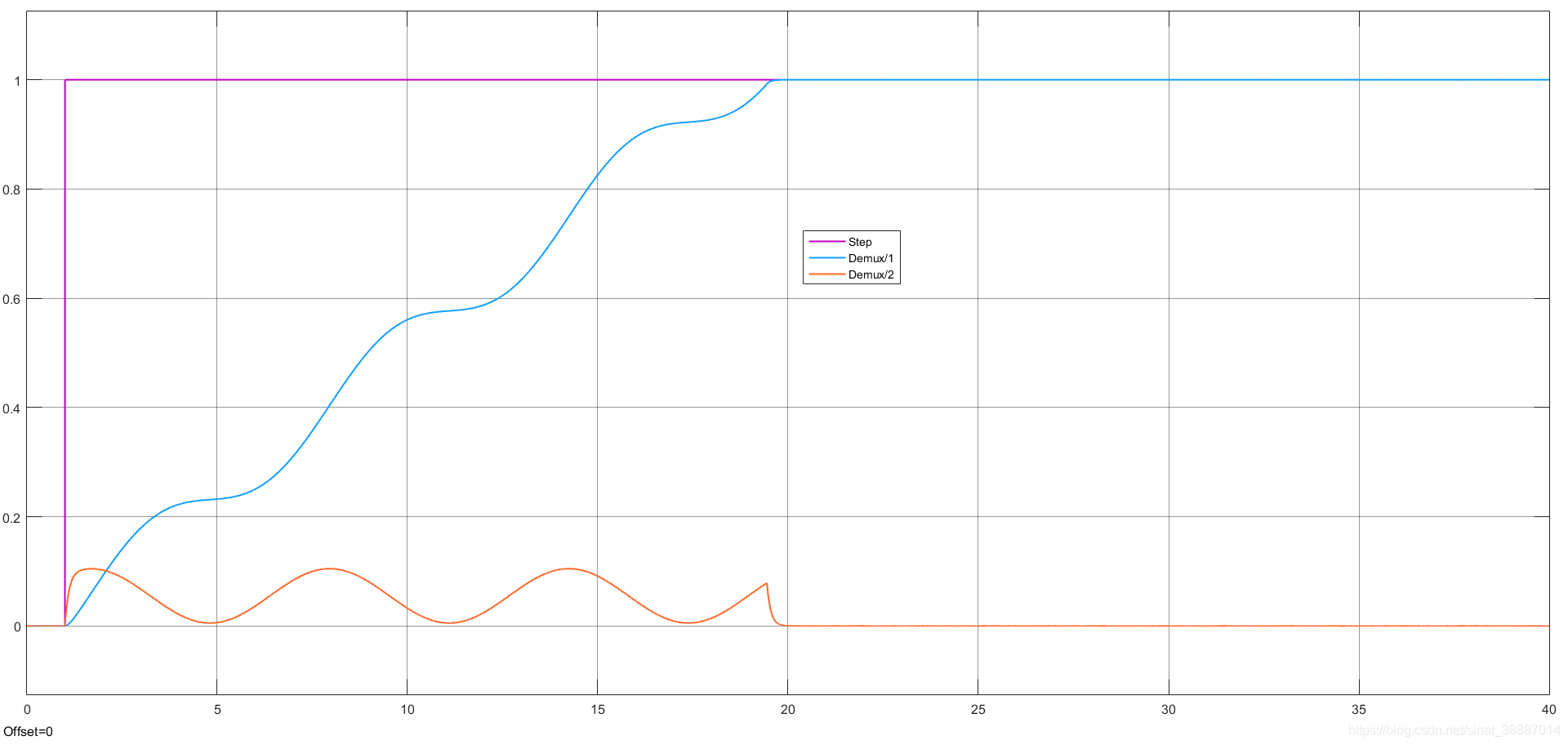
系统最终能够跟踪阶跃信号
————————————————
版权声明:本文为CSDN博主「PriscillaSCU」的原创文章,遵循CC 4.0 BY-SA版权协议,转载请附上原文出处链接及本声明。
原文链接:https://blog.csdn.net/sinat_38887014/article/details/103115218
【Matlab】简单的滑模控制程序及Simulink仿真的更多相关文章
- 使用滑模控制对sin(t)曲线追踪
结合:[Matlab]简单的滑模控制程序及Simulink仿真本片文章观看,此篇文章是在这篇文章的基础上进行修改的 输出u的推导过程 如果不明白控制量输出u的推到过成请看:[控制理论]滑模控制最强解析 ...
- 非刚性图像配准 matlab简单示例 demons算法
2011-05-25 17:21 非刚性图像配准 matlab简单示例 demons算法, % Clean clc; clear all; close all; % Compile the mex f ...
- matlab 调用C程序进行simulink仿真
文章目录 simulink仿真 创建C程序 编译C程序 运行结果 simulink仿真 simulink仿真中需要使用S-Function模块,可以实现调用C程序进行仿真,下面先建立一个简单的仿真: ...
- MATLAB 右键该文件不存在或者SIMULINK打开后仿真器件报错
错误示例: 提示是否创建文件 并且会提示某某模块或者某某文件未找到not found 原因: .m文件不存在,是因为所打开的文件还并没有添加进matlab的搜索目录,或者是需要.m文件运行后生成的 某 ...
- MATLAB设计模糊控制器并用simulink仿真
一.设计模糊控制器1.1 创建项目文件夹在此路径如图 1.2 打开MATLAB打开MATLAB R2012a切换当前目录为上一步路径,如图 1.3 设计模糊控制器打开模糊控制器设计对话框 根据模糊控制 ...
- 车辆跟随滑模控制的python实现
上一篇文章一个汽车跟踪问题的滑模控制实例,已经从理论上证明了可以使用滑模变结构控制策略来解决汽车跟踪问题. 下面分别采用指数趋近律.等速趋近律.准滑模控制的方法完成车辆跟随问题的仿真 import m ...
- Simulink仿真入门到精通(二) Simulink模块
2.1 Simulink模块的组成要素 用户构建系统模型时无需直接面对成千上万行的代码,而是通过模块化图形界面以模块化的方式构建,能够使理解变得容易,让大脑减负.通过层次化模块分布将系统功能模块化,而 ...
- Simulink仿真入门到精通(十九) 总结回顾&自我练习
从2019年12月27到2020年2月12日,学习了Simulink仿真及代码生成技术入门到精通,历时17天. 学习的比较粗糙,有一些地方还没理解透彻,全书梳理总结: Simulink的基础模块已基本 ...
- 震荡信号Simulink仿真
1. simulink仿真设计 震荡信号本质是调制信号,可以表示为: u(t)=A*(1+m*cos(Ωt+θ))*cos(ωt+φ)=A*cos (ωt+φ)+ A*m*cos(Ωt+θ)*cos( ...
随机推荐
- Winform实现客户端的自动更新
话不多说,直接上干货.当然也希望各位前辈多多指导. 自动更新客户端的设计原理图 请花两分钟时间,仔细阅读下面这张图,明白客户端自动升级的原理. 自动更新的效果图 1. ...
- WPS:添加公式后,行间距变宽的解决方法
找到公式所属段落的样式,右键修改样式 左下角'格式'中选择'段落' 段落间距设置为0,不要勾选与文档网格对齐
- Pycharm:如果想验证一个文件中的函数
在该文件的函数后写上两句 def test(): pass if __name__='__main__': test() 这样就可以执行该函数 如果只是在其他文件中导入了该函数,则不会执行最后两段话, ...
- VM虚拟机 Ubuntu配置与ssh连接
VMware安装ubuntu 自定义 不作更改 选择稍后安装操作系统,相当于裸机,没装系统. 选择ubuntu64 选择虚拟机名字与保存路径 配置情况 2G即可 网络类型,选择NAT 可以了解一下这几 ...
- PHP-MVC-三层架构模拟
1.控制器定义 <?php class VideoController{ public function index(){ echo "这是视频控制器的index方法"; i ...
- 『现学现忘』Docker常用命令 — 19、容器常用命令(一)
目录 1.新建并启动容器 2.列出当前所有正在运行的容器 3.退出容器 4.启动容器 5.重启容器 6.停止容器 7.强制停止容器 8.删除已停止的容器 有镜像才能创建容器,这是根本前提. 我们下载一 ...
- clang的线程安全分析模块 thread safety analysis
介绍 Clang的线程安全分析模块是C++语言的一个扩展,能对代码中潜在的竞争条件进行警告.这种分析是完全静态的(即编译时进行),没有运行时的消耗.当前这个功能还在开发中,但它已经具备了足够的成熟度, ...
- 面试题详解:如何用Redis实现分布式锁?
说一道常见面试题: 使用Redis分布式锁的详细方案是什么? 一个很简单的答案就是去使用 Redission 客户端.Redission 中的锁方案就是 Redis 分布式锁的比较完美的详细方案. 那 ...
- Swagger整合Jwt授权配置
Swagger整合Jwt授权配置 欢迎关注博主公众号「Java大师」, 专注于分享Java领域干货文章http://www.javaman.cn/sb2/swagger-jwt 一.Swagger入门 ...
- MM32F0020 UART1空闲中断接收
目录: 1.MM32F0020简介 2.初始化MM32F0020 UART1空闲中断和NVIC中断 3.编写MM32F0020 UART1中断接收和空闲中断函数 4.编写MM32F0020 UART1 ...