3DRealCar: An In-the-wild RGB-D Car Dataset with 360-degree Views
3DRealCar:An In-the-wild RGB-D Car Dataset with 360-degree Views
Du, Xiaobiao and Sun, Haiyang and Wang, Shuyun and Wu, Zhuojie and Sheng, Hongwei and Ying
来自很多单位,其中企业所在单位是Li Auto
项目地址: https://xiaobiaodu.github.io/3drealcar/
git code: https://github.com/xiaobiaodu/3DRealCar_Dataset
本文主要是介绍自己的数据集,大概一共有2500辆车的图像,每辆车平均200张图,来自不同的角度拍摄的清晰图,这个数据集,可以用来做很多事情,比如给2d检测做数据扩充,给3d重建、3d场景生成,3d特殊场景模拟等提供数据。该数据是至今为止最大的数据集了吧,别的公开数据集都很少数量,或者质量不高。同时作者通过实验验证了数据的作用。
实验验证的流程如下:
1. framework
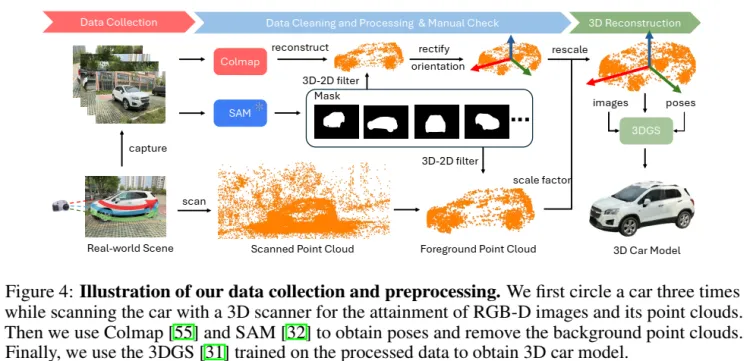
从图中可以看到用到的模块很多,其中包括Grounding dino + SAM完成bg, fg的分割, Colmap生成 point clouds,而后基于3dgs生成 3d cars

代码里只有前面数据预处理部分,3DGS部分不包含,需要自己搭建。即只包含以下部分中去掉3dgs的部分,
2.和street gaussian对比分析
和 Street Gaussians: Modeling Dynamic Urban Scenes with Gaussian Splatting,也是来自Li auto的工作,是zju和Li auto一起合作的工作,两者其实区别蛮多的,
共同点:
都是用3d gaussian对物体进行建模的; 都是对adas场景进行处理; 都用到了额外的point cloud而不是只有SFM产生的。
不同点:
street gaussian是场景下建模,是减去背景后留下前景,背景用一种建模方式球谐函数介绍(Spherical Harmonics),前景用一种建模方式 dynamic spherical
harmonics model 动态球谐函数介绍(Spherical Harmonics)。因此,这个过程中有前景有背景。对背景进行了建模,也对前景进行了建模。结果比较模糊,好像没办法把单独某个目标拿出来?这种方式是场景重建,但是不能对单个目标拿出来放到别的地方使用,或者是不知道怎么用?
3drealdata是用分割的形式去掉背景,留下前景,而后用3d gaussian对前景进行建模。只重建前景目标。同一个目标图像更丰富,结果更加清晰,可以旋转大角度,这种方式生成的数据可以把车辆放到任何位置或者任意pose下使用。3d real data使用的是标准的gaussian splatting,而street gaussian 是做了改进。
3DRealCar: An In-the-wild RGB-D Car Dataset with 360-degree Views的更多相关文章
- 基于Android的rgb七彩环颜色采集器
代码地址如下:http://www.demodashi.com/demo/11892.html 一.前言. 在大学期间,看到这个rgb灯,蛮好奇的,这么漂亮的颜色采集,并且可以同步到设备rbg灯颜色, ...
- 颜色空间变换(RGB-HSV)
#!/usr/bin/env python #***************************************************************************** ...
- Sass关于颜色函数的乐趣
阅读目录 1. 了解RGB和HSL颜色标准 2. RGB函数 3. HSL函数 4. Opacity函数 5. 其他颜色函数 6. 一个简单的应用 在Sass中,定义了很多现成的函数,可供我们使用.在 ...
- 捆绑和缩小(BundleConfig.RegisterBundles) 第五章 : MVC中的使用 | {version}用法
使用捆绑与 ASP.NET MVC 放缩法 在这一节我们将创建 ASP.NET MVC 项目,审查捆绑和缩小.首先,创建一个新的 ASP.NET MVC 互联网项目,命名为MvcBM ,而无需更改任何 ...
- 提取肤色信息原理及操作——opencv
网上也有很多的资料,讲述怎么提取肤色的,大致有5种方法.这几种方法转载http://blog.csdn.net/augusdi/article/details/8865275 第一种:RGB colo ...
- 简单爬虫 -- 以爬取NASA AOD数据(TIFF文件)为例
目录: 网站分析 爬取下载链接 爬取TIFF图片 1.网站分析 主页面:https://neo.sci.gsfc.nasa.gov/view.php?datasetId=MYDAL2_M_AER_OD ...
- java处理图片--图片的缩放,旋转和马赛克化
这是我自己结合网上的一些资料封装的java图片处理类,支持图片的缩放,旋转,马赛克化.(转载请注明出处:http://blog.csdn.net/u012116457) 不多说,上代码: packag ...
- pytorch: 准备、训练和测试自己的图片数据
大部分的pytorch入门教程,都是使用torchvision里面的数据进行训练和测试.如果我们是自己的图片数据,又该怎么做呢? 一.我的数据 我在学习的时候,使用的是fashion-mnist.这个 ...
- pytorch学习:准备自己的图片数据
图片数据一般有两种情况: 1.所有图片放在一个文件夹内,另外有一个txt文件显示标签. 2.不同类别的图片放在不同的文件夹内,文件夹就是图片的类别. 针对这两种不同的情况,数据集的准备也不相同,第一种 ...
- Summary on Visual Tracking: Paper List, Benchmarks and Top Groups
Summary on Visual Tracking: Paper List, Benchmarks and Top Groups 2018-07-26 10:32:15 This blog is c ...
随机推荐
- 【Git】03 撤销 & 版本回退
回退分为三种情况,每种情况对应了我们文件的存储区域 工作区 | 暂存区 | 版本区(当前分支) 1.文件可能存放在工作区,没有被Git追踪[红色标记状态] 2.文件可能已经添加到暂存区,没有被Git提 ...
- AI机器人——人形机器人、双足机器人、四足机器人 —— 组成构建有哪些?
参考: https://www.youtube.com/watch?v=dLELvoFt_iA
- 乌克兰学者的学术图谱case3
============================================ 背景: 弗兰采维奇材料问题研究是欧洲最大的材料科研院所,在核电.航空.航天.军工及其他装备制造领域的先进材料研 ...
- Debian/ubuntu系统的开机自启动服务的设置——update-rc.d: error: XXX Default-Start contains no runlevels, aborting.
最近把自己的树莓派搞了起来,搭了个上网的共享热点,但是遇到了开机自启动的设置问题. 我们先给出正常的ubuntu系统的开机自启动服务的设置: 在 /etc/init.d/ 路径下面创建自启动的shel ...
- 陆吾AI智能机械狗的通讯控制
陆吾AI智能机械狗现在是蛮有名的了,在YouTube上比较火的一个东西了,和波士顿机器狗不同,波士顿机器狗价格昂贵主要原因是其定位于工业领域的机械狗因此采用的是工业级的硬件,但是如果我们采用的家用环境 ...
- 新晋 Committer!来自复旦大学的帅哥一枚
点亮Star️ · 支持我们 https://github.com/apache/dolphinscheduler 最近,社区星力量又迎来一位新晋 Committer,这次是来自复旦大学研究生在读的王 ...
- stm32g070 不同channel区别
1. TIM 2.UART
- Win32 菜单添加复选标记和单选标记
在菜单中添加复选标记用CheckMenuItem函数 CheckMenuItem函数原型: DWORD WINAPI CheckMenuItem( _In_ HMENU hMenu, //菜单句柄 _ ...
- NumPy 使用
NumPy 相当于 Python 中的 MATLAB import numpy as np # 被除数数组 dividends = np.array([10, 20, 30, 40, 50]) # 除 ...
- Ubuntu 设置远程桌面(RDP)
安装桌面环境 如果你的 Ubuntu 还没有安装桌面环境,可以选择以下之一安装: GNOME GNOME 是 Ubuntu Desktop 原生桌面环境. # 安装基本的 GNOME 桌面环境 sud ...