3DRealCar: An In-the-wild RGB-D Car Dataset with 360-degree Views
3DRealCar:An In-the-wild RGB-D Car Dataset with 360-degree Views
Du, Xiaobiao and Sun, Haiyang and Wang, Shuyun and Wu, Zhuojie and Sheng, Hongwei and Ying
来自很多单位,其中企业所在单位是Li Auto
项目地址: https://xiaobiaodu.github.io/3drealcar/
git code: https://github.com/xiaobiaodu/3DRealCar_Dataset
本文主要是介绍自己的数据集,大概一共有2500辆车的图像,每辆车平均200张图,来自不同的角度拍摄的清晰图,这个数据集,可以用来做很多事情,比如给2d检测做数据扩充,给3d重建、3d场景生成,3d特殊场景模拟等提供数据。该数据是至今为止最大的数据集了吧,别的公开数据集都很少数量,或者质量不高。同时作者通过实验验证了数据的作用。
实验验证的流程如下:
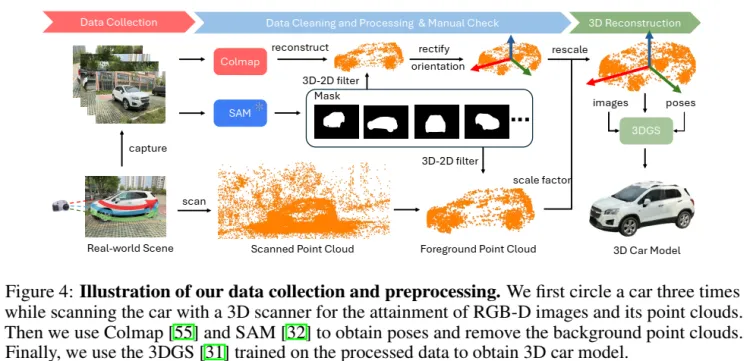
1. framework
从图中可以看到用到的模块很多,其中包括Grounding dino + SAM完成bg, fg的分割, Colmap生成 point clouds,而后基于3dgs生成 3d cars

代码里只有前面数据预处理部分,3DGS部分不包含,需要自己搭建。即只包含以下部分中去掉3dgs的部分,
2.和street gaussian对比分析
和 Street Gaussians: Modeling Dynamic Urban Scenes with Gaussian Splatting,也是来自Li auto的工作,是zju和Li auto一起合作的工作,两者其实区别蛮多的,
共同点:
都是用3d gaussian对物体进行建模的; 都是对adas场景进行处理; 都用到了额外的point cloud而不是只有SFM产生的。
不同点:
street gaussian是场景下建模,是减去背景后留下前景,背景用一种建模方式球谐函数介绍(Spherical Harmonics),前景用一种建模方式 dynamic spherical
harmonics model 动态球谐函数介绍(Spherical Harmonics)。因此,这个过程中有前景有背景。对背景进行了建模,也对前景进行了建模。结果比较模糊,好像没办法把单独某个目标拿出来?这种方式是场景重建,但是不能对单个目标拿出来放到别的地方使用,或者是不知道怎么用?
3drealdata是用分割的形式去掉背景,留下前景,而后用3d gaussian对前景进行建模。只重建前景目标。同一个目标图像更丰富,结果更加清晰,可以旋转大角度,这种方式生成的数据可以把车辆放到任何位置或者任意pose下使用。3d real data使用的是标准的gaussian splatting,而street gaussian 是做了改进。
3DRealCar: An In-the-wild RGB-D Car Dataset with 360-degree Views的更多相关文章
- 基于Android的rgb七彩环颜色采集器
代码地址如下:http://www.demodashi.com/demo/11892.html 一.前言. 在大学期间,看到这个rgb灯,蛮好奇的,这么漂亮的颜色采集,并且可以同步到设备rbg灯颜色, ...
- 颜色空间变换(RGB-HSV)
#!/usr/bin/env python #***************************************************************************** ...
- Sass关于颜色函数的乐趣
阅读目录 1. 了解RGB和HSL颜色标准 2. RGB函数 3. HSL函数 4. Opacity函数 5. 其他颜色函数 6. 一个简单的应用 在Sass中,定义了很多现成的函数,可供我们使用.在 ...
- 捆绑和缩小(BundleConfig.RegisterBundles) 第五章 : MVC中的使用 | {version}用法
使用捆绑与 ASP.NET MVC 放缩法 在这一节我们将创建 ASP.NET MVC 项目,审查捆绑和缩小.首先,创建一个新的 ASP.NET MVC 互联网项目,命名为MvcBM ,而无需更改任何 ...
- 提取肤色信息原理及操作——opencv
网上也有很多的资料,讲述怎么提取肤色的,大致有5种方法.这几种方法转载http://blog.csdn.net/augusdi/article/details/8865275 第一种:RGB colo ...
- 简单爬虫 -- 以爬取NASA AOD数据(TIFF文件)为例
目录: 网站分析 爬取下载链接 爬取TIFF图片 1.网站分析 主页面:https://neo.sci.gsfc.nasa.gov/view.php?datasetId=MYDAL2_M_AER_OD ...
- java处理图片--图片的缩放,旋转和马赛克化
这是我自己结合网上的一些资料封装的java图片处理类,支持图片的缩放,旋转,马赛克化.(转载请注明出处:http://blog.csdn.net/u012116457) 不多说,上代码: packag ...
- pytorch: 准备、训练和测试自己的图片数据
大部分的pytorch入门教程,都是使用torchvision里面的数据进行训练和测试.如果我们是自己的图片数据,又该怎么做呢? 一.我的数据 我在学习的时候,使用的是fashion-mnist.这个 ...
- pytorch学习:准备自己的图片数据
图片数据一般有两种情况: 1.所有图片放在一个文件夹内,另外有一个txt文件显示标签. 2.不同类别的图片放在不同的文件夹内,文件夹就是图片的类别. 针对这两种不同的情况,数据集的准备也不相同,第一种 ...
- Summary on Visual Tracking: Paper List, Benchmarks and Top Groups
Summary on Visual Tracking: Paper List, Benchmarks and Top Groups 2018-07-26 10:32:15 This blog is c ...
随机推荐
- 老代码报错:scipy.misc.imresize报错: AttributeError: module 'scipy.misc' has no attribute 'imresize'
运行老代码报错: image = misc.imresize(image, [Config.IMAGE_HEIGHT, Config.IMAGE_WIDTH], 'bilinear')Attribut ...
- 【转载】 详解nohup /dev/null 2>&1 含义的使用
原文地址: https://www.jb51.net/article/169837.htm ==================================== 这篇文章主要介绍了详解nohup ...
- vim跳转到上次和下次光标位置
在vim的命令模式下: ctrl + i 下次光标位置; ctrl + o 上次光标位置. =====================================
- 《最新出炉》系列小成篇-Python+Playwright自动化测试-67 - 模拟手机浏览器兼容性测试
1.简介 在日常工作中,我们会遇到需要使用不同的硬件设备测试兼容性的问题,尤其是现在手机型号基本上是每个厂家每年发布一款新机型,而且手机的屏幕大小分辨率五花八门的,我们基本不可能全部机型都用真机测试一 ...
- manim边学边做--圆形类
在manim的丰富图形库中,圆形类是一个基础且强大的模块.无论是简单的圆形绘制,还是复杂的圆形变换,它都能以简洁的代码实现. manim中圆形类的相关模块主要有3个: Circle:标准的圆形 Ann ...
- C语言操作时间函数time.ctime,实现定时执行某个任务小例子
时间操作函数在实际项目开发中会经常用到,最近做项目也正好用到就正好顺便整理一下. 时间概述 由上图可知: 通过系统调用函数time()可以从内核获得一个类型为time_t的1个值,该值叫calenda ...
- C#/.NET/.NET Core技术前沿周刊 | 第 1 期(2024年8.12-8.18)
前言 C#/.NET/.NET Core技术前沿周刊,你的每周技术指南针!记录.追踪C#/.NET/.NET Core领域.生态的每周最新.最实用的技术文章.社区动态.优质项目和学习资源等.让你时刻站 ...
- JAVA——水仙花数问题
2024/07/12 1.问题 2.错误解法 3.错误分析 4.正确解法 5.其他:关于Java中幂函数的用法 6.参考 1.问题 2.错误解法 import java.util.Scanner; p ...
- Vue使用v-for 循环生成tabs 标签页
实现最终效果: template代码: activeName:默认第一个显示的tab <el-tabs v-model="activeName" type="car ...
- MATLAB 绘制 K 线图
需要安装 Financial Toolbox. % 示例数据 openPrices = [100, 102, 104, 103, 105]; highPrices = [105, 107, 106, ...