Simulating a Freight robot in Gazebo
Installation
Before installing the simulation environment, make sure your desktop is setup with a standard installation of ROS Indigo on Ubuntu 14.04. Once your APT repositories are configured, you can install the simulator:
$ sudo apt-get update
$ sudo apt-get install ros-indigo-fetch-gazebo-demo
Warning
Never run the simulator on the robot. Simulation requires that the ROS parameter use_sim_time be set to true, which will cause the robot drivers to stop working correctly. In addition, be sure to never start the simulator in a terminal that has the ROS_MASTER_URI set to your robot for the same reasons.
Starting the Simulator
The fetch_gazebo and fetch_gazebo_demo packages provide the Gazebo environment for Fetch. fetch_gazebo includes several launch files:
- simulation.launch spawns a robot in an empty world.
- playground.launch spawns a robot inside a lab-like test environment. This environment has some tables with items that may be picked up and manipulated. It also has a pre-made map which can be used to test out robot navigation and some simple demonstrations of object grasping.
To start the simplest environment with Freight
$ roslaunch fetch_gazebo simulation.launch robot:=freight
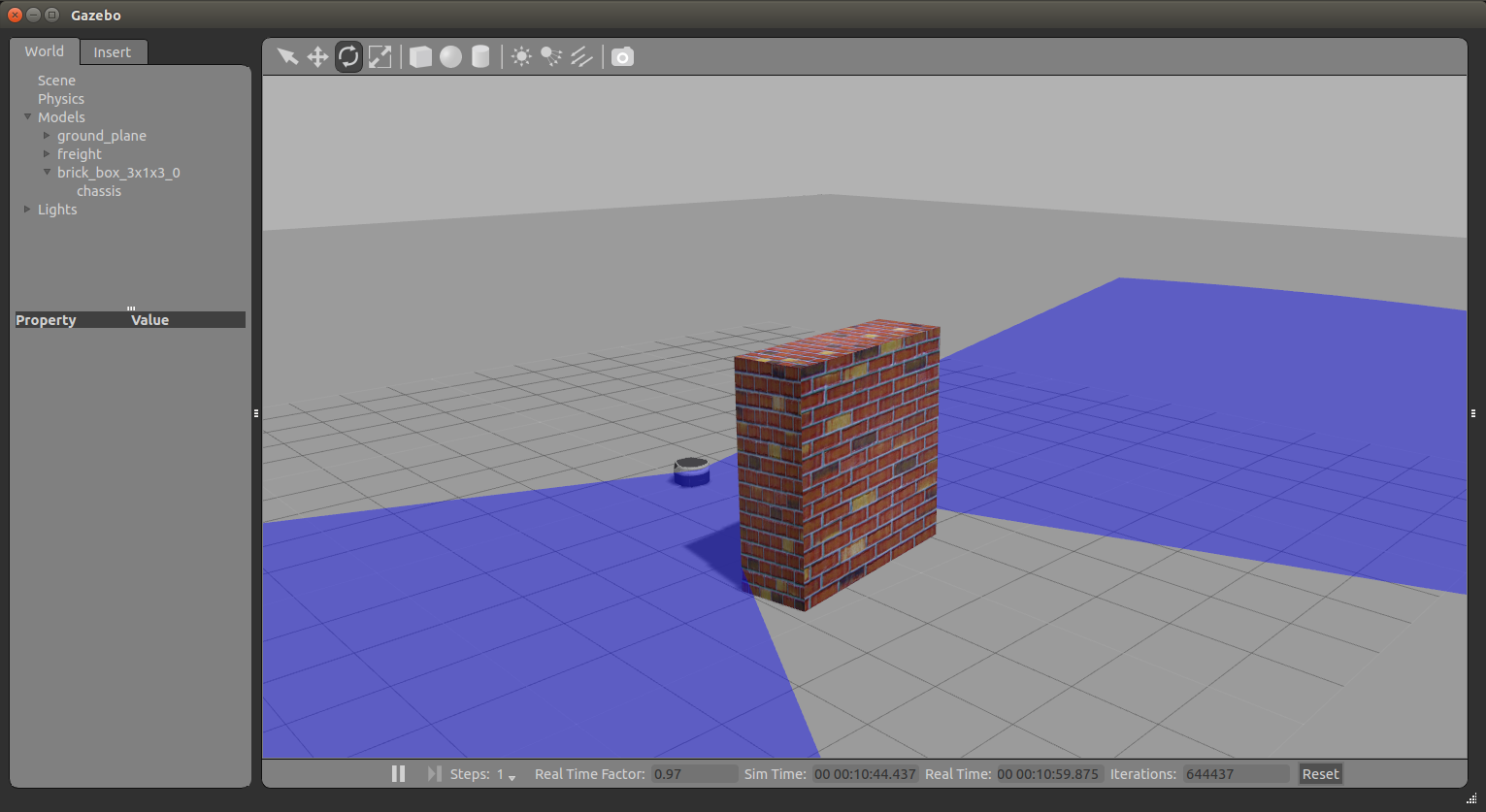
Adding a Brick wall to see how lidar scan works:
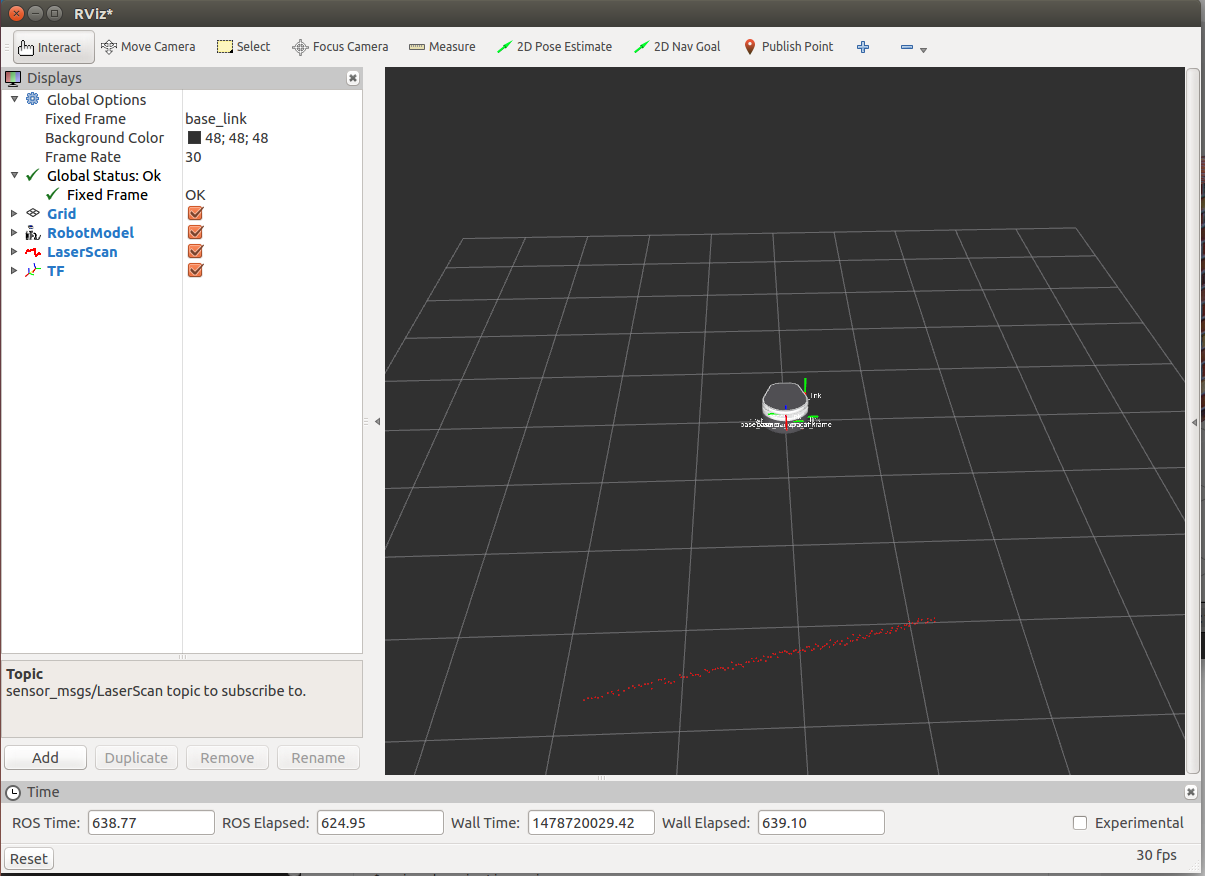
Visualizing with RVIZ
Even though Gazebo has a graphical visualization, RVIZ is still the preferred tool for interacting with your robot.
$ rosrun rviz rviz
Simulating a Freight robot in Gazebo的更多相关文章
- Simulating a Fetch robot in Gazebo
Installation Before installing the simulation environment, make sure your desktop is setup with a st ...
- run a Freight robot (1)
1. Freight robot The Fetch and Freight Research Edition Robots are indoor laboratory robots. Coordin ...
- run a Freight robot (2)
3. Network Setup Connecting Freight to a Monitor The easiest way to configure the wireless networki ...
- implement "slam_karto" package on a Freight robot
1. login ssh fetch@<robot ip or robot name> 2. set robot master modify .bashrc in robot's com ...
- run a Freight robot (3)
5.Logging In Once the robot is turned on and the robot is on the network, ssh into the computer of t ...
- Making my own Autonomous Robot in ROS / Gazebo, Day 1: Building the static model
Day 1: Setting up ROS: Indigo OS: Ubuntu 14.04 OS: Gazebo 7.0.0 Initialize the workspace To create t ...
- Gazebo機器人仿真學習探索筆記(七)连接ROS
中文稍后补充,先上官方原版教程.ROS Kinetic 搭配 Gazebo 7 附件----官方教程 Tutorial: ROS integration overview As of Gazebo 1 ...
- Gazebo Ros入门
教程代码 First step with gazebo and ros • setup a ROS workspace • create projects for your simulated rob ...
- getting started with building a ROS simulation platform for Deep Reinforcement Learning
Apparently, this ongoing work is to make a preparation for futural research on Deep Reinforcement Le ...
随机推荐
- selenium webdriver设置超时
webdriver类中有三个和时间相关的方法: 1.pageLoadTimeout 2.setScriptTimeout 3.implicitlyWait pageLoadTimeout from s ...
- PHP json_decode object时报错Cannot use object of type stdClass as array
PHP json_decode object时报错Cannot use object of type stdClass as array php再调用json_decode从字符串对象生成json对象 ...
- OSAL
1. CC254x的软件基于OSAL架构 2. OSAL并非一个真的操作系统, 而只是让软件设立一个事件的执行方法(setup excution of events) 3. 每一个子系统都在OSAL的 ...
- CDN流量放大攻击思路
首先,为了对CDN进行攻击,我们必须清楚CDN的工作原理,这里我们再来简单介绍一下CDN的工作模型. CDN的全称是Content Delivery Network(内容分发网络),通过在网络各处的加 ...
- 【翻译】了解ASP.NET MVC的HTML助手
原文:Understanding HTML Helpers in ASP.NET MVC 作 者:Shailendra Chauhan works as Software Analyst at rep ...
- readonly/disable input 问题
Perhapes for surity, in chrome and IE10, readonly/disabled input will be reset when the form submit. ...
- String.Join 和 Distinct 方法 去除字符串中重复字符
Qualys项目中写到将ServerIP以“,”分割后插入数据库并将重复的IP去除后发送到服务器进行Scan,于是我写了下面的一段用来剔除重复IP: //CR#1796870 modify by v- ...
- JSONArray遍历
java代码 方法一: 1 2 3 4 5 JSONArray array = JSONArray.fromObject(data); for (Object object : array) { ...
- 还原数据库,恢复SQLSERVER登录名的问题
还原SQLSERVER数据库,原来的数据库的于当前SQLSERVER同名用户就不能再登录了,原因是当前SQLSERVERD的master数据库的sysxlogins表的的sid与还原后的数据库的sys ...
- asp.net 父窗体获取子窗体的返回值,可用来对父窗体局部更新
今天在项目上遇到了这个问题,其实只是window.returnValue的简单应用,不是asp.net的专属内容.作为积累,记录一个简单的实现模型. 图1 用到的文件 从图1中我们可以看到,只用到了 ...