[CREC2007/CQOI2014]robotic sort
Description
一个实验室里有n个长短不一的试管。你的任务是编写一段程序,用机器臂把它们按照高度从小到大的顺序排列。
对于高度相同的试管,排序前后的相对位置应保持不变。排序方法如图所示。
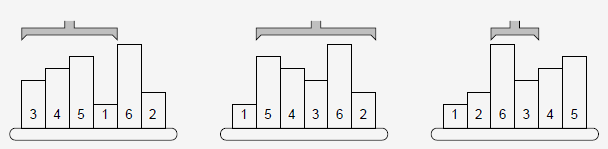
排序需要n次操作,其中第i次操作是反转序列i ~ Pi,其中Pi是目标状态中第i个试管当前所在的位置。比如,在上图中,初始时P1=4,因此反转试管1 ~ 4就能把最左边的试管归位。类似地,第2次操作前P2=6,因此反转2 ~ 6就能把左数第2个试管归位。你的任务是输出P1,P2,…,Pn的值,以便控制机器臂移动。注意i=Pi时实际上不需要反转,但仍然需要输出Pi。
Input
输入包含多组测试数据。每组数据第一行为试管个数n(1≤n≤100000),第二行从左到右依次为每个试管的高度。输入以0结束。
Output
对于每组数据输出一行,依次为P1,P2,…,Pn。
Sample Input
6
3 4 5 1 6 2
4
3 3 2 1
0
Sample Output
4 6 4 5 6 6
4 2 4 4
记录一个pos[x],代表以x为根的子树内的最小编号,那么每次查询[i,n]中的最小值,然后把该点splay到根后,左子树的大小就是答案,然后维护一个翻转标记即可。建树的时候不能建成一条链,要递归建成一棵树
/*program from Wolfycz*/
#include<cmath>
#include<cstdio>
#include<cstring>
#include<iostream>
#include<algorithm>
#define inf 0x7f7f7f7f
using namespace std;
typedef long long ll;
typedef unsigned int ui;
typedef unsigned long long ull;
inline int read(){
int x=0,f=1;char ch=getchar();
for (;ch<'0'||ch>'9';ch=getchar()) if (ch=='-') f=-1;
for (;ch>='0'&&ch<='9';ch=getchar()) x=(x<<1)+(x<<3)+ch-'0';
return x*f;
}
inline void print(int x){
if (x>=10) print(x/10);
putchar(x%10+'0');
}
const int N=1e5;
struct AC{
int val,pos;
void join(int i){val=read(),pos=i;}
}A[N+10];
bool cmp(AC x,AC y){return x.val!=y.val?x.val<y.val:x.pos<y.pos;}
bool cmp1(AC x,AC y){return x.pos<y.pos;}
struct Splay{
#define T(x) (tree[f[x]][1]==x)
#define ls (tree[x][0])
#define rs (tree[x][1])
int tree[N+10][2],f[N+10],size[N+10],Min[N+10],v[N+10],pos[N+10],ans[N+10];
bool flag[N+10];
int root,n;
void updata(int x){
size[x]=size[ls]+size[rs]+1;
Min[x]=v[x],pos[x]=x;
if (Min[x]>Min[ls]){Min[x]=Min[ls];pos[x]=pos[ls];}
if (Min[x]>Min[rs]){Min[x]=Min[rs];pos[x]=pos[rs];}
}
void pushdown(int x){
if (!flag[x]) return;
flag[ls]^=1;
flag[rs]^=1;
swap(ls,rs);
flag[x]=0;
}
void build(int fa,int l,int r){
if (l>r) return;
if (l==r){
f[l]=fa,size[l]=1;
l<fa?tree[fa][0]=l:tree[fa][1]=l;
v[l]=Min[l]=A[l].val,pos[l]=l;
return;
}
int mid=(l+r)>>1;
build(mid,l,mid-1),build(mid,mid+1,r);
f[mid]=fa,v[mid]=A[mid].val;
mid<fa?tree[fa][0]=mid:tree[fa][1]=mid;
updata(mid);
}
void move(int x){
int fa=f[x],son=tree[x][T(x)^1];
tree[x][T(x)^1]=fa;
tree[fa][T(x)]=son;
if (son) f[son]=fa;
f[x]=f[fa];
if (f[x]) tree[f[x]][T(fa)]=x;
f[fa]=x;
updata(fa),updata(x);
}
void up(int x){
if (!x) return;
up(f[x]);
pushdown(x);
}
void splay(int x){
up(x);
while (f[x]){
if (f[f[x]]) T(x)==T(f[x])?move(f[x]):move(x);
move(x);
}
root=x;
}
int find(int x,int i){
if (!i) return 0;
pushdown(i);
if (size[tree[i][0]]+1==x) return i;
if (x<=size[tree[i][0]]) return find(x,tree[i][0]);
return find(x-size[tree[i][0]]-1,tree[i][1]);
}
void filp(int x,int y){
x=find(x,root),splay(x);
y=find(y+2,root),splay(y);
if (f[x]!=root) move(x);
flag[tree[x][1]]^=1;
}
int query(int x,int y){
x=find(x,root),splay(x);
y=find(y+2,root),splay(y);
if (f[x]!=root) move(x);
return pos[tree[x][1]];
}
void init(){
n=read(),root=(n+3)>>1;
if (!n) exit(0);
A[1].val=A[n+2].val=Min[0]=inf;
for (int i=2;i<=n+1;i++) A[i].join(i);
sort(A+2,A+2+n,cmp);
for (int i=2;i<=n+1;i++) A[i].val=i;
sort(A+2,A+2+n,cmp1);
build(0,1,n+2);
}
void work(){
init();
for (int i=1;i<=n;i++){
int x=query(i,n);
splay(x);
ans[i]=size[tree[x][0]];
filp(i,ans[i]);
}
for (int i=1;i<=n;i++) i!=n?printf("%d ",ans[i]):printf("%d\n",ans[i]);
}
}T;
int main(){
T.work();
return 0;
}
[CREC2007/CQOI2014]robotic sort的更多相关文章
- [bzoj1552\bzoj2506][Cqoi2014]robotic sort 排序机械臂_非旋转Treap
robotic sort 排序机械臂 bzoj-1552 bzoj-2506 Cqoi-2014 题目大意:给定一个序列,让你从1到n,每次将[1,p[i]]这段区间反转,p[i]表示整个物品权值第i ...
- 【BZOJ】【1552】【Cerc2007】robotic sort / 【3506】【CQOI2014】排序机械臂
Splay 离散化+Splay维护序列…… 好吧主要说一下我做这道题遇到的几个错误点: 1.离散化 2.由于找到的这个数的位置一定是大于等于 i 的,所以其实在把它splay到根以后,i 结点只能sp ...
- 洛谷 P4402 BZOJ1552 / 3506 [Cerc2007]robotic sort 机械排序
FHQ_Treap 太神辣 蒟蒻初学FHQ_Treap,于是来到了这道略显板子的题目 因为Treap既满足BST的性质,又满足Heap的性质,所以,对于这道题目,我们可以将以往随机出的额外权值转化为每 ...
- [BZOJ1552][Cerc2007]robotic sort
[BZOJ1552][Cerc2007]robotic sort 试题描述 输入 输入共两行,第一行为一个整数N,N表示物品的个数,1<=N<=100000.第二行为N个用空格隔开的正整数 ...
- HDU1890 Robotic Sort[splay 序列]
Robotic Sort Time Limit: 6000/2000 MS (Java/Others) Memory Limit: 32768/32768 K (Java/Others)Tota ...
- 【BZOJ-1552&3506】robotic sort&排序机械臂 Splay
1552: [Cerc2007]robotic sort Time Limit: 5 Sec Memory Limit: 64 MBSubmit: 806 Solved: 329[Submit][ ...
- 数据结构(Splay平衡树):HDU 1890 Robotic Sort
Robotic Sort Time Limit: 6000/2000 MS (Java/Others) Memory Limit: 32768/32768 K (Java/Others)Tota ...
- BZOJ 1552: [Cerc2007]robotic sort( splay )
kpm大神说可以用块状链表写...但是我不会...写了个splay.... 先离散化 , 然后splay结点加个min维护最小值 , 就可以了... ( ps BZOJ 3506 题意一样 , 双倍经 ...
- hdu 1890 Robotic Sort(splay 区间反转+删点)
题目链接:hdu 1890 Robotic Sort 题意: 给你n个数,每次找到第i小的数的位置,然后输出这个位置,然后将这个位置前面的数翻转一下,然后删除这个数,这样执行n次. 题解: 典型的sp ...
随机推荐
- 如何使用Mysql Workbench导出一整个sql文件,sql包?
1. 点击Management ; 2. 点击Data Export 3. 点击需要备份的数据名字并打钩 1是点击查看2是选择 4. 在右下方选择要要备份的类型(框架,数据,框架+数据) 5. 选择你 ...
- 郁闷的出纳员(bzoj 1503)
Description OIER公司是一家大型专业化软件公司,有着数以万计的员工.作为一名出纳员,我的任务之一便是统计每位员工的工资.这本来是一份不错的工作,但是令人郁闷的是,我们的老板反复无常,经常 ...
- 【小记事】电脑命令行开WiFi
1.设置WiFi名称和密码 在命令行输入: netsh wlan set hostednetwork mode=allow WiFi名称 key=密码 2.开启WiFi 在命令行输入: netsh w ...
- Uva 106 - Fermat vs. Pythagoras 解题报告
数论题,考查了本原勾股数(PPT) 对一个三元组(a,b,c)两两互质 且满足 a2 + b2 = c2 首先有结论 a 和 b 奇偶性不同 c总是奇数(可用反证法证明,不赘述) 设 a为奇数 b为偶 ...
- redhat 6 配置 yum 源
1.删除redhat原有的yum rpm -aq|grep yum|xargs rpm -e --nodeps 2.下载yum安装文件 注意,如果下载时找不到文件,就登录到:http://mirror ...
- webpack-输出
输出(Output) 配置 output 选项可以控制 webpack 如何向硬盘写入编译文件. 注意,即使可以存在多个入口起点,但只指定一个输出配置. 用法(Usage) 在 webpack 中配置 ...
- react 项目实战(五)渲染用户列表
现在我们需要一个页面来展现数据库中记录的用户. 在/src/pages下新建UserList.js文件. 创建并导出UserList组件: import React from 'react'; cla ...
- Alluxio增强Spark和MapReduce存储能力
Alluxio的前身为Tachyon.Alluxio是一个基于内存的分布式文件系统:Alluxio以内存为中心设计,他处在诸如Amazon S3. Apache HDFS 或 OpenStack Sw ...
- 推荐IOS开发3个工具:Homebrew、TestFight、Crashlytics-b
1. Homebrew 什么是Homebrew? Homebrew is the easiest and most flexible way to install the UNIX tools App ...
- mac 查看python路径
1,terminal : input: which python 2, terminal: input : python --->import sys ----> print sys ...