Issac_GYM对Go2机器人的仿真心得
override 覆盖
torques 扭矩
1 args()参数信息等
cd /home/yyds/桌面/Gym2/legged_robot_competition-master/legged_gym/legged_gym/utils/helpers.py
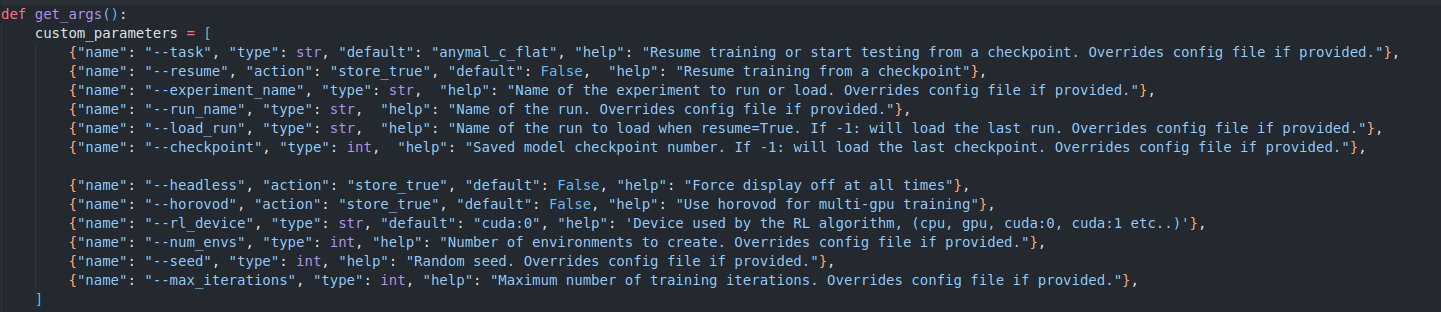
这里对 train等参数的调用情况进行了说明
比如:
python play.py --task=go2 --num_envs=64 --checkpoint=50 --load_run=/home/yyds/桌面/Gym2/legged_robot_competition-master/legged_gym/logs/rough_go2/Oct12_16-27-03_
其中check_point 保存的一组训练参数
check_point = 50
num_envs = 64
同时进行64个环境一起训练
2
2
2
2
2
2
2
2
2
2
2
2
2
2
Issac_GYM对Go2机器人的仿真心得的更多相关文章
- ROS机器人导航仿真(kinetic版本)
准备工作: ubuntu 16.04系统;ROS kinetic版本;ROS包turtlebot,导航包rbx1,模拟器arbotix,可视化rviz 1.安装ubuntu 16.04系统与安装ROS ...
- 机器人与机器人仿真技术(zz)
http://www.viblue.com/archives/5587.htm 一.机器人简介: 机器人(Robot)是自动执行工作的机器装置.它既可以接受人类指挥,又可以运行预先编排的程序,也可以根 ...
- 基于 Mathematica 的机器人仿真环境(机械臂篇)[转]
完美的教程,没有之一,收藏学习. 目的 本文手把手教你在 Mathematica 软件中搭建机器人的仿真环境,具体包括以下内容(所使用的版本是 Mathematica 11.1,更早的版本可能缺少某些 ...
- ROS机器人程序设计(原书第2版)补充资料 教学大纲
ROS机器人程序设计(原书第2版) 补充资料 教学大纲 针对该书稍后会补充教学大纲.教案.多媒体课件以及练习题等. <ROS机器人程序设计>课程简介 课程编号:XXXXXX 课程名称:RO ...
- 浅谈机器人控制与仿真设计----RDS和ROS
机器人控制.仿真或实验,主要由三个部分组成,机器人.环境和算法. 当然各部分又包含很多子部分和功能,这里主要以仿真为主,为了使得仿真结果能够直接应用到实际机器人上,这里分别以RDS和ROS对比介绍.h ...
- ROS(indigo)swarm_robot 群机器人示例Gazebo
ROS(indigo)swarm_robot 群机器人示例Gazebo 参考网址:https://github.com/yangliu28/swarm_robot_ros_sim 安装提示:catki ...
- ROS学习笔记十二:使用gazebo在ROS中仿真
想要在ROS系统中对我们的机器人进行仿真,需要使用gazebo. gazebo是一种适用于复杂室内多机器人和室外环境的仿真环境.它能够在三维环境中对多个机器人.传感器及物体进行仿真,产生实际传感器反馈 ...
- 多指灵巧手MoveIt!与Gazebo联合仿真框架搭建
至于为什么叫框架,一是因为灵巧手的3维模型没有按照基本的设计要求画,正常来说,设计机器人机构之前应该设计好机构需要多少个自由度/DOF,每个自由度是旋转/revolute类型还是滑移/prismati ...
- ROS机器人操作系统相关书籍、资料和学习路径
作者:Top Liu链接:https://zhuanlan.zhihu.com/p/30391098来源:知乎著作权归作者所有.商业转载请联系作者获得授权,非商业转载请注明出处. 本文是易科机器人实验 ...
- 1、roboguide新建工程文件
打开roboguide,软件界面如下,接下来讲解一下“打开和新建工程文件” 首先介绍一下新建工程文件,在工具栏中点击新建按钮或者在文件(file)的下拉菜单中点击新建工程文件(new cell),弹出 ...
随机推荐
- MFC对话框程序:实现程序启动画面
MFC对话框程序:实现程序启动画面 对于比较大的程序,在启动的时候都会显示一个画面,以告诉用户程序正在加载,或者显示一些关于软件的信息,如Visual C++,Word, PhotoShop等.那么对 ...
- Java抽象类 小白版
什么是抽象 抽象就是从多个事物中将共性的,本质的内容抽象出来. 什么是抽象类 Java语言中,用abstract关键字修饰的类叫作抽象类.类本身是不存在的,所以抽象类无法创建对象无法实例化. 在面向对 ...
- 如何查看mongodb的索引命中率
如何查看mongodb的索引命中率 一.背景 现在mongodb使用率很高,经常会遇到查询慢时,就会创建索引,而有时候索引命中率又不高,下面来介绍下测试环境下如何查看索引命中率 二.方案 1.首先查看 ...
- div构建table
1.Css display值与解释-(详细可见CSS手册的CSS display手册)参数:block :块对象的默认值.用该值为对象之后添加新行none :隐藏对象.与visibility属性的hi ...
- USACO 23023DEC 题解
LG LG9979 [USACO23DEC] Target Practice S code LG9980 [USACO23DEC] Flight Routes G sol 1 已知邻接矩阵求路径数奇偶 ...
- 【Python】之Mac使用图片识别pytesseract方法报错
一.前提: python中使用pytesseract图片识别,报错误: pytesseract.pytesseract.TesseractNotFoundError: tesseract is not ...
- 以太坊Rollup方案之 arbitrum(1)
什么是Rollup? 以太坊的Rollup扩容是一种Layer 2(第二层)扩容解决方案,旨在提高以太坊区块链的交易吞吐量和性能.它通过将大量的交易数据转移到以太坊区块链之外的第二层网络来实现这一目标 ...
- ASP.NET Core Library – scriban (Template Engine)
前言 有些项目会需要让 end user 写模板 (rich text) 同时又需要做一些 data binding. 这几乎是 programmer 的工作了... 在 C#, 大可以使用 Razo ...
- Servlet——简介
Servlet 快速入门 1.创建web项目,导入Servlet依赖坐标 <dependencies> <dependency> <groupId>jav ...
- Java poi 读取 word 、 pdf
从各个博客 CV 出来的,不好意思 pom <dependency> <groupId>org.apache.poi</groupId> <artifactI ...