Issac_GYM对Go2机器人的仿真心得
override 覆盖
torques 扭矩
1 args()参数信息等
cd /home/yyds/桌面/Gym2/legged_robot_competition-master/legged_gym/legged_gym/utils/helpers.py
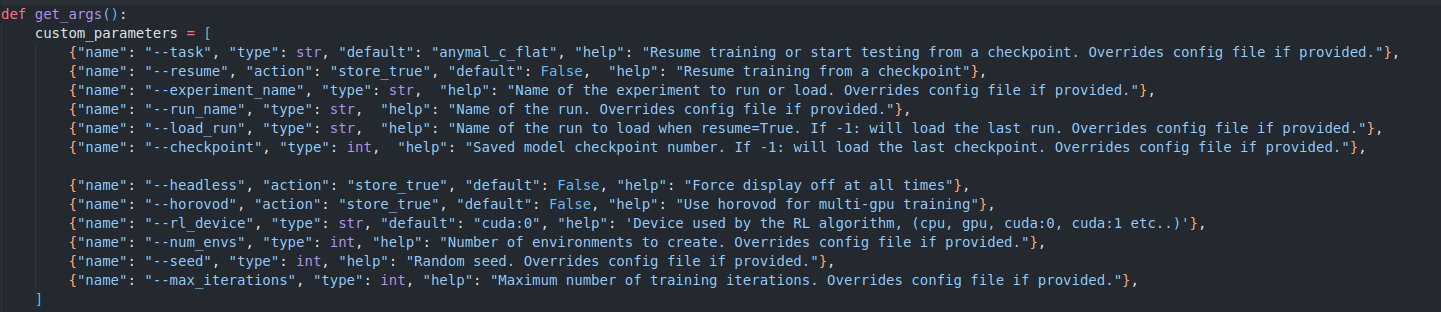
这里对 train等参数的调用情况进行了说明
比如:
python play.py --task=go2 --num_envs=64 --checkpoint=50 --load_run=/home/yyds/桌面/Gym2/legged_robot_competition-master/legged_gym/logs/rough_go2/Oct12_16-27-03_
其中check_point 保存的一组训练参数
check_point = 50
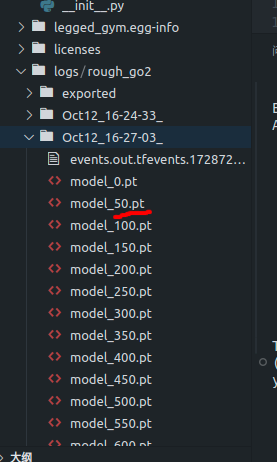
num_envs = 64
同时进行64个环境一起训练
2
2
2
2
2
2
2
2
2
2
2
2
2
2
Issac_GYM对Go2机器人的仿真心得的更多相关文章
- ROS机器人导航仿真(kinetic版本)
准备工作: ubuntu 16.04系统;ROS kinetic版本;ROS包turtlebot,导航包rbx1,模拟器arbotix,可视化rviz 1.安装ubuntu 16.04系统与安装ROS ...
- 机器人与机器人仿真技术(zz)
http://www.viblue.com/archives/5587.htm 一.机器人简介: 机器人(Robot)是自动执行工作的机器装置.它既可以接受人类指挥,又可以运行预先编排的程序,也可以根 ...
- 基于 Mathematica 的机器人仿真环境(机械臂篇)[转]
完美的教程,没有之一,收藏学习. 目的 本文手把手教你在 Mathematica 软件中搭建机器人的仿真环境,具体包括以下内容(所使用的版本是 Mathematica 11.1,更早的版本可能缺少某些 ...
- ROS机器人程序设计(原书第2版)补充资料 教学大纲
ROS机器人程序设计(原书第2版) 补充资料 教学大纲 针对该书稍后会补充教学大纲.教案.多媒体课件以及练习题等. <ROS机器人程序设计>课程简介 课程编号:XXXXXX 课程名称:RO ...
- 浅谈机器人控制与仿真设计----RDS和ROS
机器人控制.仿真或实验,主要由三个部分组成,机器人.环境和算法. 当然各部分又包含很多子部分和功能,这里主要以仿真为主,为了使得仿真结果能够直接应用到实际机器人上,这里分别以RDS和ROS对比介绍.h ...
- ROS(indigo)swarm_robot 群机器人示例Gazebo
ROS(indigo)swarm_robot 群机器人示例Gazebo 参考网址:https://github.com/yangliu28/swarm_robot_ros_sim 安装提示:catki ...
- ROS学习笔记十二:使用gazebo在ROS中仿真
想要在ROS系统中对我们的机器人进行仿真,需要使用gazebo. gazebo是一种适用于复杂室内多机器人和室外环境的仿真环境.它能够在三维环境中对多个机器人.传感器及物体进行仿真,产生实际传感器反馈 ...
- 多指灵巧手MoveIt!与Gazebo联合仿真框架搭建
至于为什么叫框架,一是因为灵巧手的3维模型没有按照基本的设计要求画,正常来说,设计机器人机构之前应该设计好机构需要多少个自由度/DOF,每个自由度是旋转/revolute类型还是滑移/prismati ...
- ROS机器人操作系统相关书籍、资料和学习路径
作者:Top Liu链接:https://zhuanlan.zhihu.com/p/30391098来源:知乎著作权归作者所有.商业转载请联系作者获得授权,非商业转载请注明出处. 本文是易科机器人实验 ...
- 1、roboguide新建工程文件
打开roboguide,软件界面如下,接下来讲解一下“打开和新建工程文件” 首先介绍一下新建工程文件,在工具栏中点击新建按钮或者在文件(file)的下拉菜单中点击新建工程文件(new cell),弹出 ...
随机推荐
- 10-canva绘制数据点
1 <!DOCTYPE html> 2 <html lang="en"> 3 <head> 4 <meta charset="U ...
- AtCoder Beginner Contest 311
Toyota Programming Contest 2023#4(AtCoder Beginner Contest 311) A - First ABC (atcoder.jp) 记录一下\(ABC ...
- .NET 9发布的最后一个预览版Preview 7, 下个月发布RC
微软在2024年8月9日 发布了.NET 9 Preview 7[1],这是它在2024 年 11 月 12 日 RTM 之前进入发布候选阶段之前的最后预览版, 将在.NET Conf 2024 一起 ...
- kafka查看未被消费的消息
$ kubectl exec -it gitee-kafka-0 -n gitee bash unset JMX_PORT $ kafka-consumer-groups.sh --bootstrap ...
- Linux如何给根目录扩容内存
第一种:LVM分区格式,就是用系统默认的自动分区格式 1.添加一块20G大小的nvme硬盘 2.启动后,查看硬盘是否已经被系统识别 3.对/dev/nvme0n2进行分区,并设置分区属性 fdisk ...
- Ubuntu 16.04 安装 python3.8
Ubuntu 16.04 amd64 (64bit)(纯净版) 自带python2.7和python3.5 执行"whereis python"查看当前安装的python [ro ...
- 肉夹馍(Rougamo)4.0.1 异步方法变量调试修复与IoC系列扩展
肉夹馍(https://github.com/inversionhourglass/Rougamo),一款编译时AOP组件,无需在应用启动时进行初始化,也无需繁琐的配置:支持所有种类方法(同步和异步. ...
- 【LLM训练系列】从零开始训练大模型之Phi2-mini-Chinese项目解读
一.前言 本文主要是在复现和实践Phi2-mini-Chinese后,简要分析下Phi2-mini-Chinese这个项目,做一个学习实战总结. 原文发布于知乎:https://zhuanlan.zh ...
- Rounding
前言 以前写过一篇关于 Rouding 的 decimal, double, float, 但有点杂乱, 这篇做一个整理. Why need rouding? 除法会诞生小数. 甚至会诞生无限小数 ( ...
- 【渗透测试】ATT&CK靶场一,phpmyadmin,域渗透,内网横向移动攻略
前言 VulnStack,作为红日安全团队匠心打造的知识平台,其独特优势在于全面模拟了国内企业的实际业务场景,涵盖了CMS.漏洞管理及域管理等核心要素.这一设计理念源于红日安全团队对ATT&C ...