ROS-SLAM仿真-hector
前言:hector_slam可以很好的在空中机器人,手持构图设备及特种机器人中运行。
hector_slam不需要订阅里程计信息/odmo消息,而是直接使用激光估算里程计信息,因此,当机器人速度较快时会发生打滑现象,导致建图效果出现误差。
前提:已下载并编译了相关功能包集,如还未下载,可通过git下载:https://github.com/huchunxu/ros_exploring.git
一、安装hector_slam功能包
ros中已集成了hector_slam功能包
sudo apt-get install ros-kinetic-hector-slam
二、在Gzebo中仿真SLAM
2.1 启动仿真环境
cd ~/catkin_ws/src/robot_mrobot/mrobot_gazebo/launchroslaunch mrobot_laser_nav_gazebo.launch
2.2 启动slam导航
cd ~/catkin_ws/src/robot_mrobot/mrobot_navigation/launch roslaunch hector_demo.launch
2.3 启动键盘控制
roslaunch mrobot_teleop mrobot_teleop.launch
-----------------------------------------
显示如下:
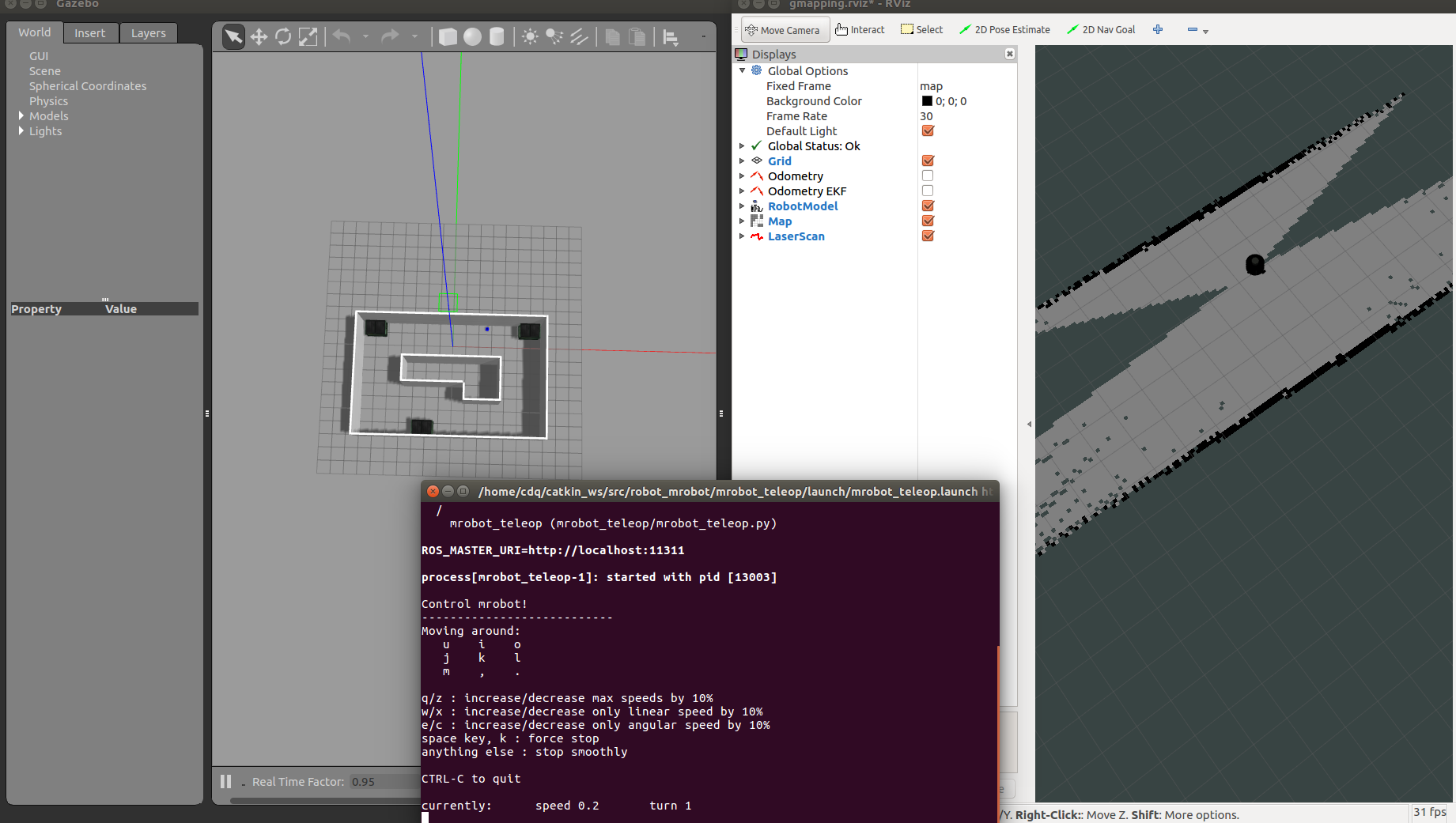
-END-
ROS-SLAM仿真-hector的更多相关文章
- 【ros】rplidar Hector Slam
想用rplidar跑一下hector slam,在网上发现了几个教程写的都不错,但是亲测发现都有点不足,综合了一下,进行补充. 1. 安装ros 和 创建工作空间 http://blog.csdn.n ...
- ROS学习笔记十二:使用gazebo在ROS中仿真
想要在ROS系统中对我们的机器人进行仿真,需要使用gazebo. gazebo是一种适用于复杂室内多机器人和室外环境的仿真环境.它能够在三维环境中对多个机器人.传感器及物体进行仿真,产生实际传感器反馈 ...
- 论文阅读:hector_slam: A Flexible and Scalable SLAM System with Full 3D Motion Estimation.
参考:<A Flexible and Scalable SLAM System with Full 3D Motion Estimation.> 该论文是ROS中hector_mappin ...
- 视觉SLAM漫淡(二):图优化理论与g2o的使用
视觉SLAM漫谈(二):图优化理论与g2o的使用 1 前言以及回顾 各位朋友,自从上一篇<视觉SLAM漫谈>写成以来已经有一段时间了.我收到几位热心读者的邮件.有的希望我介绍一下当前 ...
- 2D激光SLAM算法比较+cartographer
Hector slam: Hector slam利用高斯牛顿方法解决scan-matching问题,对传感器要求较高. 缺点:需要雷达(LRS)的更新频率较高,测量噪声小.所以在制图过程中,需要rob ...
- ROS机器人导航一 : 从英雄联盟到ROS导航
写在前面: 这是这个系列的第一篇 本系列主要从零开始深入探索ROS(机器人操作系统)的导航和规划. 这个系列的目标,是让大家了解: 1.ROS的导航是怎么实现的 2.认识ROS里各种已有的导航算法,清 ...
- ROS机器人操作系统相关书籍、资料和学习路径
作者:Top Liu链接:https://zhuanlan.zhihu.com/p/30391098来源:知乎著作权归作者所有.商业转载请联系作者获得授权,非商业转载请注明出处. 本文是易科机器人实验 ...
- stage_ros的world文件配置方法
官方文档参阅:http://rtv.github.io/Stage/modules.html stage_ros是一个基于stage的2D模拟器,用于ROS的仿真测试.虽然现在越来越多的人在使用gaz ...
- rplidar & hector slam without odometry
接上一篇:1.rplidar测试 方式一:测试使用rplidar A2跑一下手持的hector slam,参考文章:用hector mapping构建地图 但是roslaunch exbotxi_br ...
随机推荐
- canvas的常用api
canvas 标签 <canvas width="600" height="400" id="canvas"></canv ...
- GoogleMap 获取自己的数字证书API key的步骤
http://dreamylights.blog.51cto.com/1163218/1360759 1. 进入到Google APIs Console页面 https://code.google.c ...
- hdu3861 The King’s Problem 强连通缩点+DAG最小路径覆盖
对多校赛的题目,我深感无力.题目看不懂,英语是能懂的,题目具体的要求以及需要怎么做没有头绪.样例怎么来的都不明白.好吧,看题解吧. http://www.cnblogs.com/kane0526/ar ...
- 【Oracle】非RMAN恢复数据文件、控制文件
实验环境:OEL 5.6 oracle 11g(11.2.0.4.0) 注意: system表空间数据文件不能在线recover,需要启动到mount状态再recover: undo表空间数据文件可以 ...
- Walking on the path of Redis --- Introduction and Installation
废话开篇 以前从来没听说过有Redis这么个玩意,无意间看到一位仁兄的博客,才对其有所了解,所以决定对其深入了解下.有不对的地方还请各位指正. Redis介绍 下面是官方的介绍,不喜欢english的 ...
- Warning:关于_CRT_SECURE_NO_WARNINGS
Warning 1 warning C4996: 'fopen': This function or variable may be unsafe. Consider using fopen_s in ...
- java真实面试题(2)
1,递归算法的实行过程,一般来说,可以分为()和()两个阶段,若一个问题的求解既可以用递归也可以用递推时,则往往用(),因为().贪婪法是一种()的算法. 答:递归算法分为递推和回归两个阶段,递推效率 ...
- 企业级任务调度框架Quartz(1) --企业应用中的任务调度介绍
由于目前的工作内容为建行CLPM批处理业务的设计工作,所以很好的理解批处理所用的任务调度框架Quartz势在必行:为了能够更好的去服务于工作,也 为了提升自己,所以我学习了Quartz Job Sch ...
- javaee 文件的写入
package Shurushucu; import java.io.FileNotFoundException; import java.io.FileOutputStream; import ja ...
- 数据分析例子-------CTR1
1.CTR: (1)几个概念: impression(展示):用户看到该广告的次数.也就是一个广告被显示了多少次,它就计数多少.比如:打开网站的一个页面,网站上的所有广告就被显示了一次,每个广告增加1 ...