【C++】双边滤波器(bilateral filter)
Bilateral Filtering for Gray and Color Images
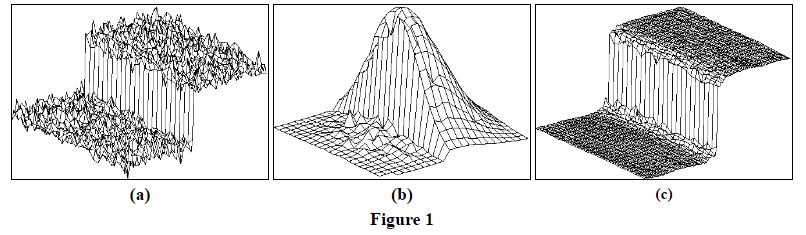
双边滤波器:保留边界的平滑滤波器。 在局部上,就是在灰度值差异不大的区域平滑,在灰度值差异比较大的边界地区保留边界。所以双边滤波器作用于每个像素的同时,必然会受到领域像素点的距离、灰度值差的权重影响。
已知低通滤波可以表示为:


range filter可以表示为:(range filter 试选定一个数值范围,再做滤波的一个操作)


所以,双边滤波器的定义是:

其中,k(x)是归一化(normalize)函数,

( f 表示原图像,h 表示处理后的图像 x 表示 h 中某个像素点位置,ξ 表示 f 中x位置像素点的邻域像素,f(ξ)表示该像素点的灰度值,c表示低通滤波, s表示range filter)
其中,


//Filters.h #ifndef FILTERS_H
#define FILTERS_H #include "opencv2/imgproc.hpp"
#include "opencv2/highgui.hpp"
#include "opencv2/core.hpp" #include <iostream>
#include <cmath> //Bilateral Filtering
//sigmaD == sigmaSpace, sigmaR == sigmaColor
cv::Mat BilateralFilter(cv::Mat inputImg, int filterSize, double sigmaD, double sigmaR); cv::Mat fastBilateralFilter(cv::Mat inputImg, int filterSize, double sigmaD, double sigmaR); #endif // ! FILTERS_H
//Filters.cpp
#include "Filters.h"
double SpaceFactor(int x1, int y1, int x2, int y2, double sigmaD) {
double absX = pow(abs(x1 - x2), );
double absY = pow(abs(y1 - y2), );
return exp(-(absX + absY) / ( * pow(sigmaD, )));
}
double ColorFactor(int x, int y, double sigmaR) {
double distance = abs(x - y) / sigmaR;
return exp(-0.5 * pow(distance, ));
}
cv::Mat BilateralFilter(cv::Mat inputImg, int filterSize, double sigmaD, double sigmaR) {
int len; //must be odd number
cv::Mat gray; // must be 1-channel image
cv::Mat LabImage; // if channels == 3
if (filterSize % != || filterSize <= ) {
std::cerr << "Filter Size must be a positive odd number!" << std::endl;
return inputImg;
}
len = filterSize / ;
if (inputImg.channels() >= ) {
cv::cvtColor(inputImg, LabImage, cv::COLOR_BGR2Lab);
gray = cv::Mat::zeros(LabImage.size(), CV_8UC1);
for (int i = ; i < LabImage.rows; i++) {
for (int j = ; j < LabImage.cols; j++) {
gray.ptr<uchar>(i)[j] = LabImage.ptr<uchar>(i, j)[];
}
}
}
else if(inputImg.channels() == ){
inputImg.copyTo(gray);
}
else {
std::cerr << "the count of input image's channel can not be 2!" << std::endl;
return inputImg;
}
cv::Mat resultGrayImg = cv::Mat::zeros(gray.size(), CV_8UC1);
for (int i = ; i < gray.rows; i++) {
for (int j = ; j < gray.cols; j++) {
double k = ;
double f = ;
for (int r = i - len; r <= i + len; r++) {
for (int c = j - len; c <= j + len; c++) {
if (r < || c < || r >= gray.rows || c >= gray.cols)
continue;
f = f + gray.ptr<uchar>(r)[c] * SpaceFactor(i, j, r, c, sigmaD) * ColorFactor(gray.ptr<uchar>(i)[j], gray.ptr<uchar>(r)[c], sigmaD);
k += SpaceFactor(i, j, r, c, sigmaD) * ColorFactor(gray.ptr<uchar>(i)[j], gray.ptr<uchar>(r)[c], sigmaD);
}
}
int value = f / k;
if (value < ) value = ;
else if (value > ) value = ;
resultGrayImg.ptr<uchar>(i)[j] = (uchar)value;
}
}
cv::Mat resultImg;
if (inputImg.channels() >= ) {
for (int i = ; i < LabImage.rows; i++) {
for (int j = ; j < LabImage.cols; j++) {
LabImage.ptr<uchar>(i, j)[] = resultGrayImg.ptr<uchar>(i)[j];
}
}
cv::cvtColor(LabImage, resultImg, cv::COLOR_Lab2BGR);
}
else {
resultGrayImg.copyTo(resultImg);
}
return resultImg;
}
cv::Mat fastBilateralFilter(cv::Mat inputImg, int filterSize, double sigmaD, double sigmaR) {
int len; //must be odd number
cv::Mat gray; // must be 1-channel image
cv::Mat LabImage; // if channels == 3
if (filterSize % != || filterSize <= ) {
std::cerr << "Filter Size must be a positive odd number!" << std::endl;
return inputImg;
}
len = filterSize / ;
if (inputImg.channels() >= ) {
cv::cvtColor(inputImg, LabImage, cv::COLOR_BGR2Lab);
gray = cv::Mat::zeros(LabImage.size(), CV_8UC1);
for (int i = ; i < LabImage.rows; i++) {
for (int j = ; j < LabImage.cols; j++) {
gray.ptr<uchar>(i)[j] = LabImage.ptr<uchar>(i, j)[];
}
}
}
else if (inputImg.channels() == ) {
inputImg.copyTo(gray);
}
else {
std::cerr << "the count of input image's channel can not be 2!" << std::endl;
return inputImg;
}
cv::Mat resultGrayImg = cv::Mat::zeros(gray.size(), CV_8UC1);
for (int i = ; i < gray.rows; i++) {
for (int j = ; j < gray.cols; j++) {
double k = ;
double f = ;
double sum = ;
for (int r = i - len; r <= i + len; r++) {
if (r < || r >= gray.rows)
continue;
f = f + gray.ptr<uchar>(r)[j] * SpaceFactor(i, j, r, j, sigmaD) * ColorFactor(gray.ptr<uchar>(i)[j], gray.ptr<uchar>(r)[j], sigmaD);
k += SpaceFactor(i, j, r, j, sigmaD) * ColorFactor(gray.ptr<uchar>(i)[j], gray.ptr<uchar>(r)[j], sigmaD);
}
sum = f / k;
f = k = 0.0;
for (int c = j - len; c <= j + len; c++) {
if (c < || c >= gray.cols)
continue;
f = f + gray.ptr<uchar>(i)[c] * SpaceFactor(i, j, i, c, sigmaD) * ColorFactor(gray.ptr<uchar>(i)[j], gray.ptr<uchar>(i)[c], sigmaD);
k += SpaceFactor(i, j, i, c, sigmaD) * ColorFactor(gray.ptr<uchar>(i)[j], gray.ptr<uchar>(i)[c], sigmaD);
}
int value = (sum + f / k) / ;
if (value < ) value = ;
else if (value > ) value = ;
resultGrayImg.ptr<uchar>(i)[j] = (uchar)value;
}
}
cv::Mat resultImg;
if (inputImg.channels() >= ) {
for (int i = ; i < LabImage.rows; i++) {
for (int j = ; j < LabImage.cols; j++) {
LabImage.ptr<uchar>(i, j)[] = resultGrayImg.ptr<uchar>(i)[j];
}
}
cv::cvtColor(LabImage, resultImg, cv::COLOR_Lab2BGR);
}
else {
resultGrayImg.copyTo(resultImg);
}
return resultImg;
}
//main.cpp #include <iostream>
#include <time.h> #include "Filters.h" using namespace std; int main() {
cv::Mat img = cv::imread("Capture.jpg", cv::IMREAD_UNCHANGED);
clock_t begin_time = clock();
cv::Mat result = BilateralFilter(img, , 12.5, );
std::cout << float(clock() - begin_time) / CLOCKS_PER_SEC << std:: endl;
cv::imshow("original", result);
cv::waitKey();
cv::imwrite("original.jpg", result); begin_time = clock();
result = fastBilateralFilter(img, , 12.5, );
std::cout << float(clock() - begin_time) / CLOCKS_PER_SEC << std::endl;
cv::imshow("fast", result);
cv::waitKey();
cv::imwrite("fast.jpg", result); begin_time = clock();
cv::bilateralFilter(img, result, , , 12.5);
std::cout << float(clock() - begin_time) / CLOCKS_PER_SEC << std::endl;
cv::imshow("opencv", result);
cv::waitKey();
cv::imwrite("opencv.jpg", result); system("pause");
return ;
}
运行结果:
46.889s 5.694s 0.202s
二维算子降成两个一维算子之后,速度加快了一些,但是还是不如opencv的快,效果也比它差一些(No more reinventing the wheel...)
从左至右:“小雀斑”帅气原图、BilateralFilter处理结果、fastBilateralFilter处理结果、opencv接口处理结果




【C++】双边滤波器(bilateral filter)的更多相关文章
- 【VS开发】【图像处理】双边滤波器bilateral filter
目录(?)[-] 简介 原理 代码实现 1 Spatial Weight 2 Similarity Weight 3 Color Filtering 在SSAO中的使用 1. 简介 图像平滑是一个重要 ...
- Bilateral Filter
最近在看图像风格化的论文的时候,频繁遇到 Bilateral Filter.google 一波后,发现并不是什么不得了的东西,但它的思想却很有借鉴意义. 简介 Bilateral Filter,中文又 ...
- 三维网格去噪算法(bilateral filter)
受图像双边滤波算法的启发,[Fleishman et al. 2003]和[Jones et al. 2003]分别提出了利用双边滤波算法对噪声网格进行光顺去噪的算法,两篇文章都被收录于当年的SIGG ...
- vs2015+opencv3.3.1 实现 c++ 双边滤波器(Bilateral Filter)
#include <opencv2\highgui\highgui.hpp> #include <iostream> #include<vector> using ...
- 卡尔曼滤波器 Kalman Filter (转载)
在学习卡尔曼滤波器之前,首先看看为什么叫“卡尔曼”.跟其他著名的理论(例如傅立叶变换,泰勒级数等等)一样,卡尔曼也是一个人的名字,而跟他们不同的是,他是个现代人! 卡 尔曼全名Rudolf Emil ...
- [转]计算机视觉之跟踪算法——相关滤波器Correlation Filter
https://blog.csdn.net/victoriaw/article/details/62416759 ASEF相关滤波器: Average of Synthetic Exact Filte ...
- 灰度图像--图像增强 双边滤波 Bilateral Filtering
学习DIP第31天 转载请标明本文出处:http://blog.csdn.net/tonyshengtan,欢迎大家转载,发现博客被某些论坛转载后,图像无法正常显示,无法正常表达本人观点,对此表示很不 ...
- 测试卡尔曼滤波器(Kalman Filter)
真实的温度测试数据,通过加热棒加热一盆水测得的真实数据,X轴是时间秒,Y轴是温度: 1)滤波前 2)滤波后(p=10, q=0.0001, r=0.05, kGain=0;) 2)滤波后(p=10, ...
- Atitit 图像处理 平滑 也称 模糊, 归一化块滤波、高斯滤波、中值滤波、双边滤波)
Atitit 图像处理 平滑 也称 模糊, 归一化块滤波.高斯滤波.中值滤波.双边滤波) 是一项简单且使用频率很高的图像处理方法 用途 去噪 去雾 各种线性滤波器对图像进行平滑处理,相关OpenC ...
随机推荐
- MultiAutoCompleteTextView
Activity_mian.xml <LinearLayout xmlns:android="http://schemas.android.com/apk/res/android&qu ...
- SQLite学习手册(开篇)
一.简介: SQLite是目前最流行的开源嵌入式数据库,和很多其他嵌入式存储引擎相比(NoSQL),如BerkeleyDB.MemBASE等,SQLite可以很好的支持关系型数据库所具备的一些基本特征 ...
- HTML 新属性
accesskey 属性 -- 代表链接的快捷键访问方式 定义了accesskey的链接可以使用快捷键(ALT+字母)访问. 主菜单与导航菜单使用accesskey,通常是不错的选择. 取值: 字母 ...
- Centos7 编译安装 Nginx、MariaDB、PHP
前言 本文主要大致介绍CentOS 7下编译安装Nginx.MariaDB.PHP.面向有Linux基础且爱好钻研的朋友.技艺不精,疏漏再所难免,还望指正. 环境简介: 系统: CentOS 7,最小 ...
- 学习笔记::kmp
matrix67 nxt[i]:[1-i]中最长公共前后缀的长度 j=0;;i<=n;i++) { ]) j=nxt[j]; ]) j++; nxt[i]=j; }
- linux的僵尸进程和孤儿进程
1 僵尸进程: 子进程已经退出勒 但是还没有回收资源的进程为僵尸进程 代码验证 #include <stdio.h> #include <stdlib.h> #include ...
- git apply failed (转载)
转自:http://blog.csdn.net/aaronzzq/article/details/6955893 git version 1.6.0.4 几个新手刚刚开始接触 Git,为了维护核心仓库 ...
- POJ2105【进制转化】
直接瞎写就可以水过.我记得STL有很多好的函数,哎.水过去补多校的题. //#include <bits/stdc++.h> #include<cstdio> #include ...
- PTA 朋友圈【并查集的合并问题】
一开始,考虑的是每次就是把第一个作为祖先,这样很明显是错误的,比如 7 4 3 1 2 3 2 4 2 3 5 6 7 1 6 所以这正是更好地体现对于集合的代表.只有把所有的元素合并一下,然后选一个 ...
- MySQL 错误码对照
1005:创建表失败 1006:创建数据库失败 1007:数据库已存在,创建数据库失败 1008:数据库不存在,删除数据库失败 1009:不能删除数据库文件导致删除数据库失败 1010:不能删除数据目 ...