基于OpenCV做“三维重建”(3)--相机参数矩阵
通过前面的相机标定,我们能够获得一些参数模型。但是这些相机的参数矩阵到底是什么意思?怎样才能够判断是否正确?误差都会来自哪里?这里就必须要通过具体实验来加深认识。采集带相机参数的图片具有一定难度,幸好我之前有着不错的积累—这里一共有两款数据集,一款来自《OpenCV计算机视觉编程攻略》第3版,家里面好像还有一款微单可以进行采集,这样我们可以进行交叉比对,看一看获得的参数是否符合实际情况:

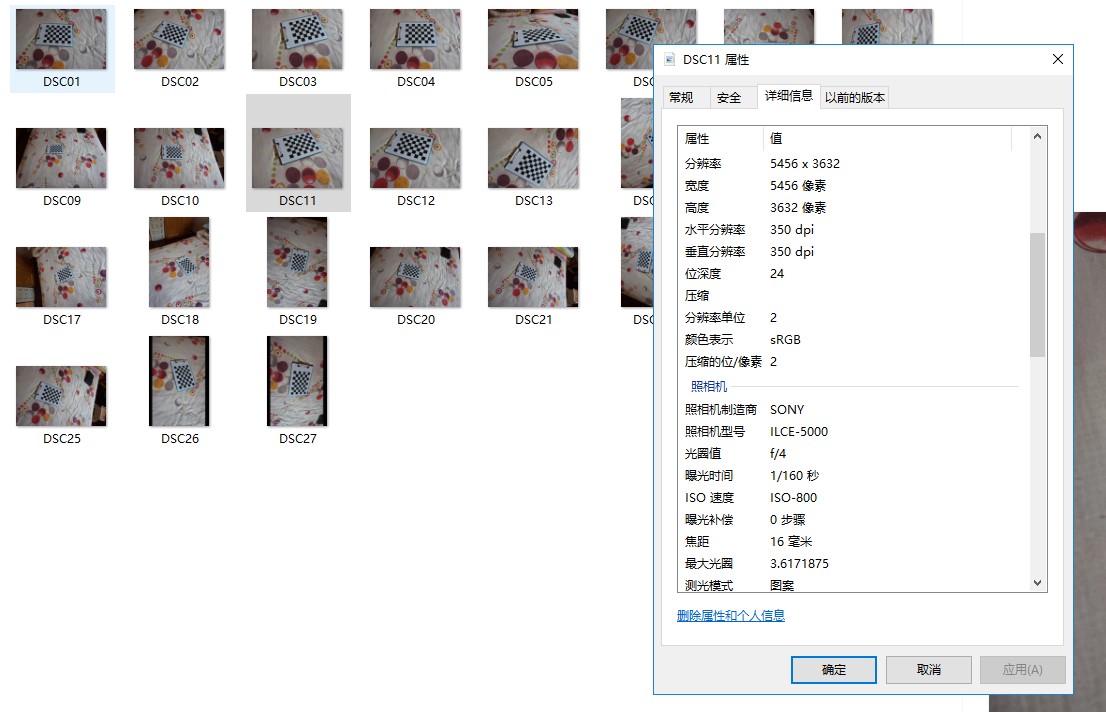 既然是做实验,我想初步计划一下。首先是要明确我能够获得那些东西?然后是比较这些东西是否真的像书上说的那样符合实际?然后我会添加一些干扰,看一看在有错误数据的情况,这些东西如何变化?最后是一个小结。
既然是做实验,我想初步计划一下。首先是要明确我能够获得那些东西?然后是比较这些东西是否真的像书上说的那样符合实际?然后我会添加一些干扰,看一看在有错误数据的情况,这些东西如何变化?最后是一个小结。
<?xml version="1.0"?>
<opencv_storage>
<Intrinsic type_id="opencv-matrix">
<rows>3</rows>
<cols>3</cols>
<dt>d</dt>
<data>
1.3589305122261344e+003 0. 5.7505355544729957e+002
0. 1.3565816672769690e+003 6.0423226535731465e+002
0. 0. 1.
</data>
</Intrinsic>
<Distortion type_id="opencv-matrix">
<rows>1</rows>
<cols>14</cols>
<dt>d</dt>
<data>
9.5113243912423840e+001 1.4262144540955842e+003
5.2119492051277685e-003 2.8847713358900241e-003
1.2859720255043484e+002 9.5182218776001392e+001
1.4741397414456521e+003 6.8332022963370434e+002 0. 0. 0. 0. 0. 0.</data></Distortion>
</opencv_storage>

<?xml version="1.0"?>
<opencv_storage>
<Intrinsic type_id="opencv-matrix">
<rows>3</rows>
<cols>3</cols>
<dt>d</dt>
<data>
4.0927176647992695e+002 0. 2.3724719115090161e+002
0. 4.0870629848642727e+002 1.7128731207874495e+002
0. 0. 1.
</data></Intrinsic>
<Distortion type_id="opencv-matrix">
<rows>1</rows>
<cols>14</cols>
<dt>d</dt>
<data>
1.8631118716959048e+001 -5.0639175384902096e+001
-5.2453807582033300e-003 -9.2620440694993842e-003
5.2367454865598742e+000 1.9002289932447418e+001
-4.8948501055979285e+001 -6.5115263545215851e-001 0. 0. 0. 0. 0. 0.</data></Distortion>
</opencv_storage>
<?xml version="1.0"?>
<opencv_storage>
<Intrinsic type_id="opencv-matrix">
<rows>3</rows>
<cols>3</cols>
<dt>d</dt>
<data>
3.9136489375791234e+003 0. 2.6879080836687035e+003
0. 3.9811430968074164e+003 1.9454067884808153e+003
0. 0. 1.
</data></Intrinsic>
<Distortion type_id="opencv-matrix">
<rows>1</rows>
<cols>14</cols>
<dt>d</dt>
<data>
2.5259392493942739e-002 -3.2418875955674309e-001
3.6376246418718853e-004 3.2526045276898190e-003
-8.1692713459156296e-002 2.5694845194956913e-002
4.7826938999253371e-001 -1.3315729771950511e+000 0. 0. 0. 0. 0. 0.</data></Distortion>
</opencv_storage>
<data>
4.0927176647992695e+002 0. 2.3724719115090161e+002
0. 4.0870629848642727e+002 1.7128731207874495e+002
0. 0. 1.
</data>





<data>
3.9136489375791234e+003 0. 2.6879080836687035e+003
0. 3.9811430968074164e+003 1.9454067884808153e+003
0. 0. 1.
</data>
基于OpenCV做“三维重建”(3)--相机参数矩阵的更多相关文章
- 基于OpenCV做“三维重建”(1)--找到并绘制棋盘
<OpenCV计算机视觉编程攻略(第3版)>这套书已经出到第3版了,如果你非要我说这本书有多好,我说不出来:只是很多我第一手的例子都是来源于这本书的-相比较OpenCV官方提供的代码,这本 ...
- 基于OpenCV做“三维重建”(2)--封装标定过程
既然已经能够找到了标定点,那么下边的工作就是使用标定结果了.[这本书在这里的内容组织让人莫名其妙]但是通过阅读代码能够很方便地串起来. /*------------------------------ ...
- 基于OpenCV做“三维重建”(4)--相机姿态还原和实现三维重建
v当我们构建成功了viz,就可以使用3维效果给我们提供的便利,进一步进行一些3维的操作. 在这个动画中,注意图片后面的那个黑线,对应的是相机的位置. /*----------------------- ...
- 基于OpenCV做“三维重建”(0)-- OpenCV3.2+VIZ6.3.0在vs2012下的编译和使用
一.问题提出 ViZ对于显示3维的效果图来说,非常有帮助:我在使用OpenCV进行双目测距的过程中,有一些参数希望能够通过可视化的方法显示出来,所以参考了这方面相关的资料.做了一些实验 ...
- 学习笔记:使用opencv做双目测距(相机标定+立体匹配+测距).
最近在做双目测距,觉得有必要记录点东西,所以我的第一篇博客就这么诞生啦~ 双目测距属于立体视觉这一块,我觉得应该有很多人踩过这个坑了,但网上的资料依旧是云里雾里的,要么是理论讲一大堆,最后发现还不知道 ...
- 基于 OpenCV 的人脸识别
基于 OpenCV 的人脸识别 一点背景知识 OpenCV 是一个开源的计算机视觉和机器学习库.它包含成千上万优化过的算法,为各种计算机视觉应用提供了一个通用工具包.根据这个项目的关于页面,OpenC ...
- [转载]卡尔曼滤波器及其基于opencv的实现
卡尔曼滤波器及其基于opencv的实现 源地址:http://hi.baidu.com/superkiki1989/item/029f65013a128cd91ff0461b 这个是维基百科中的链接, ...
- 图像矫正-基于opencv实现
一.引言 上篇文章中四种方法对图像进行倾角矫正都非常有效.Hough变换和Radon相似,其抗干扰能力比较强,但是运算量大,程序执行慢,其改进方法为:我们可以不对整幅图像进行操作,可以在图像中选取一块 ...
- 基于Opencv自带BP网络的车标简易识别
代码地址如下:http://www.demodashi.com/demo/12966.html 记得把这几点描述好咯:代码实现过程 + 项目文件结构截图 + 演示效果 1.准备工作 1.1 训练集和测 ...
随机推荐
- 报文分析5、UDP协议的头结构
UDP协议的头结构 源端口(2字节) 目的端口(2字节) 封报长度(2字节) 校验和(2字节) 数据 (1)源端口(Source Port):16位的源端口域包含初始化通信的端口号.源端口和IP地址的 ...
- 20175303 2018-2019-2 《Java程序设计》第8周学习总结
20175303 2018-2019-2 <Java程序设计>第8周学习总结 教材学习内容总结 本周学习<Java程序设计>第十五章: 泛型: 泛型(Generics)的主要目 ...
- RxSwift 介绍
RxSwift 介绍 中文文档 https://beeth0ven.github.io/RxSwift-Chinese-Documentation/ https://medium.com/@DianQ ...
- linux 逆向映射
逆向映射用于建立物理内存页和使用该页的进程的对应页表项之间的联系,在换出页时以便更新所有涉及的进程.得到物理页基址后,根据pfn_to_page可以将页框转换为page实例,page实例中的mappi ...
- spring框架学习之--数据库操作增删改查
基于spring的NamedParameterJdbcTemplate操作数据库 首先在 resources 文件夹下添加数据库配置文件jdbc.properties 配置常用的数据库信息 consu ...
- iOS的签名机制
1.从keychain里“从这证书颁发机构请求证书”,这样就在本地生成了一对公私钥,保存的CertificateSigningRequest就是公钥,私钥保存在本地电脑里. 2.苹果自己有一对固定的公 ...
- iOS 字体下载
iOS可以动态的为系统下载字体,这些字体都下载到了系统的目录下,并且可以被其他应用公用 来看下如何实现动态下载: // 创建下载字体请求描述的准备 NSMutableDictionary *attrs ...
- OpenDialog文件多选
procedure TForm1.OpenFileListClick(Sender: TObject); var openDialog: TOpenDialog; I: Integer; begin ...
- selenium的
1.简介 selenium可以认为是反反爬虫的最佳利器,它基本可以等同于真实的浏览器访问,用它可以加载到动态数据,也省去了cookie的操作,但是用这个有一个重大的效率问题.所以selenium可以用 ...
- pdf下载速度