点云3d检测模型pointpillar
PointPillars
一个来自工业界的模型.https://arxiv.org/abs/1812.05784
3D目标检测通常做法
- 3d卷积
- 投影到前平面
- 在bird-view上操作
处理思路依然是3d转2d,先把3维的点云转成2d的伪图像.
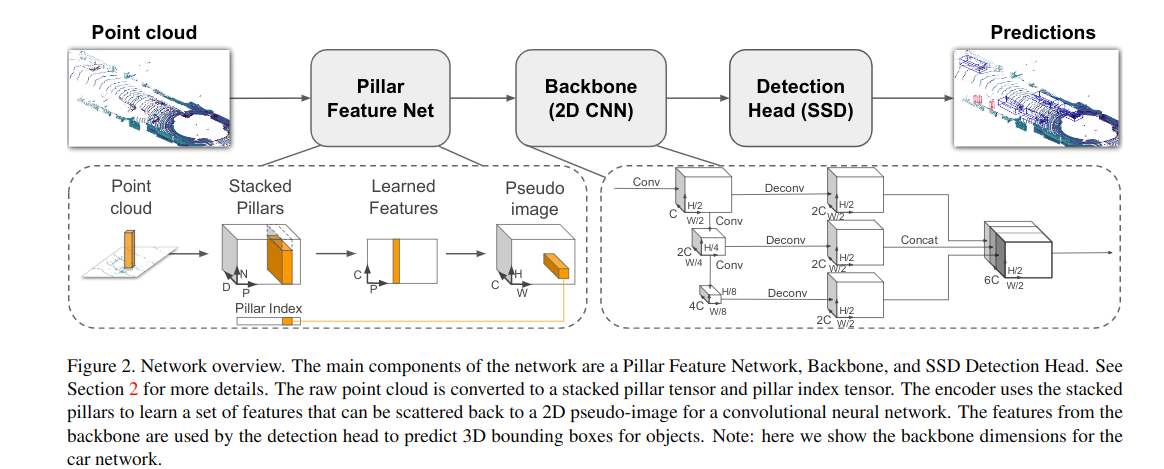
Feature Net
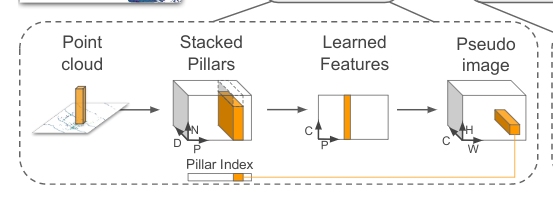
把点云数据处理成类似图像的数据.
pillar即柱子.点云的特性决定了每个柱子内的点是很稀少的.
一堆点,我们将其视为一个个柱子(即pillar),每个pillar内有很多points.所有的pillar内的point即组成了点云.
首先在x-y平面上投影出来一个h x w的网格.即划出h x w个pillar出来.
原始的点云数据point有(x,y,z,r)4个维度,r代表反射率.我们将其扩展为9个维度(x,y,z,r,x_c,y_c,z_c,x_p,y_p,带c下标的是点相对于柱子中心的偏差,带p下标的是对点相对于网格中心的偏差。每个柱子中点多于N的进行采样,少于N的进行填充0。于是就形成了(D,P,N)D=9, N为每个pillar的采样点数(设定值),P为pillar总数目,H*W。
这样点云数据就表达成了一个(D,P,N)的Tensor.
然后卷积,得到一个(C,P,N)的Tensor.在N这个维度上做max operation.得到(C,P)的tensor.变形得到(C,H,W)tensor.
至此,我们就用一个(C,H,W)的tensor完成了点云数据的表达.
Backbone
backbone完成特征提取.
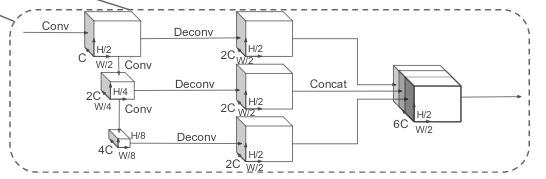
分为2部分
- top-down network产生空间分辨率逐步降低的feature map
- second network做upsample和concatenation,精细化feature.
top-down部分可以描述为一系列的block(S,L,F) S代表相对pseudo-image(即feature net得到的tensor)的stride. 一个block有L个3x3的2D卷积层. F代表输出的channel数目.
backbone输出的tensor为(6C,H/2,W/2)
Detection
用的ssd.高度z是单独回归的.
实验细节

点云转图像部分的C=64.backbone部分,车/人/自行车的S不一样.
loss设计
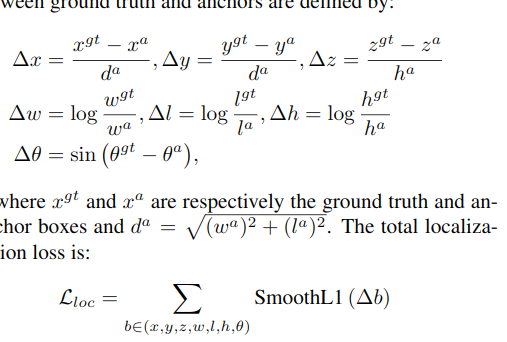
3d box由(x,y,z,w,l,h,theta)确定. 类似于2d box由(x,y,w,h)确定,3d box多了一个z方向的数据,以及一个角度,用以预计3d box的朝向(绕z轴的角度).
loss由3部分组成
- 定位loss,衡量3d box画的准不准
- 分类loss,衡量box内的物体类别判断准不准
- direction loss.定位loss虽说已经考虑了角度,但是不能区分flipped box.即比如一个3d box内的车,朝着正南和朝着正北走,标出来的3d box都是一样的.
定位loss:
分类loss:
focal loss通过对不同样本的loss赋予不同的权重,该权重是一个与当前样本预测概率相关的值.
系数为(1-p)的变种.从而达到p越小,loss权重越大的目的. 即放大hard example的loss.从而使得模型更好地适应难以分类的样本.

方向loss:
由softmax得到.

代码解析
todo
代码:https://github.com/traveller59/second.pytorch
python ./pytorch/train.py evaluate --config_path=./configs/car.fhd.config --model_dir=/path/to/model_dir --measure_time=True --batch_size=1
点云3d检测模型pointpillar的更多相关文章
- 点云3D 目标检测
点云 点云是雷达采集到的信息. 关于点云基本介绍参考https://zhuanlan.zhihu.com/p/22581673 ros中的点云消息结构:http://docs.ros.org/jade ...
- WPF 3D 平移模型+动画(桥梁检测系统)
原文:WPF 3D 平移模型+动画(桥梁检测系统) 关于WPF 3D,网上有很多旋转的例子,但是关于平移的例子并不是太多.本文并非WPF 3D扫盲篇,因此需要对WPF 3D有一定了解,至少知道View ...
- WPF在3D Cad模型中利用TextureCoordinates实现颜色渐变显示偏差值的变化
原文:WPF在3D Cad模型中利用TextureCoordinates实现颜色渐变显示偏差值的变化 注:最近在做3D机械模型重建方面的软件,需要根据光栅传感器采集的数据绘制3D图形,并显示出色差以及 ...
- 谷歌大脑提出:基于NAS的目标检测模型NAS-FPN,超越Mask R-CNN
谷歌大脑提出:基于NAS的目标检测模型NAS-FPN,超越Mask R-CNN 朱晓霞发表于目标检测和深度学习订阅 235 广告关闭 11.11 智慧上云 云服务器企业新用户优先购,享双11同等价格 ...
- 如何使用 Yolov4 训练人脸口罩检测模型
前言 疫情当下,出入医院等公共场所都被要求佩戴口罩.这篇博客将会介绍如何使用 Yolov4,训练一个人脸口罩检测模型(使用 Yolov4 的原因是目前只复现到了 v4 ),代码地址为 https:// ...
- 「视频直播技术详解」系列之七:直播云 SDK 性能测试模型
关于直播的技术文章不少,成体系的不多.我们将用七篇文章,更系统化地介绍当下大热的视频直播各环节的关键技术,帮助视频直播创业者们更全面.深入地了解视频直播技术,更好地技术选型. 本系列文章大纲如下: ...
- 使用k-means对3D网格模型进行分割
使用k-means对3D网格模型进行分割 由于一些原因,最近在做网格分割的相关工作.网格分割的方法有很多,如Easy mesh cutting.K-means.谱分割.基于SDF的分割等.根据对分割要 ...
- 基于HTML5 Canvas 点击添加 2D 3D 机柜模型
今天又返回好好地消化了一下我们的数据容器 DataModel,这里给新手做一个典型的数据模型事件处理的例子作为参考.这个例子看起来很简单,实际上结合了数据模型中非常重要的三个事件处理的部分:属性变化事 ...
- 《为大量出现的KPI流快速部署异常检测模型》 笔记
以下我为这篇<Rapid Deployment of Anomaly Detection Models for Large Number of Emerging KPI Streams>做 ...
随机推荐
- Leetcode13_罗马数字转整数
题目 罗马数字包含以下七种字符: I, V, X, L,C,D 和 M. 字符 数值I 1V 5X 10L 50C 100D 500M 1000例如, 罗马数字 2 写做 II ,即为两个并列的 1. ...
- JS替换变量中的文字字母
var text='Hello world, Hello world'; var b= text.replace('world','zhengxiaoya'); // 找到字符串中的第一个'world ...
- Unable to preventDefault inside passive event listener due to target being treated as passive. See https://www.chromestatus.com/features/5093566007214080
解决办法: 两个方案:1.注册处理函数时,用如下方式,明确声明为不是被动的window.addEventListener('touchmove', func, { passive: false }) ...
- Java虚拟机内存划分
Java虚拟机在执行Java程序时,会把它管理的内存划分为若干个不同的数据区.这些区域有不同的特性,起不同的作用.它们有各自的创建时间,销毁时间.有的区域随着进程的启动而创建,随着进程结束而销毁,有的 ...
- Qt QThread必须要了解的几个函数
概述 如果想对Qt中的QThread有个更加深刻的了解,必须要知道这几个重要的函数,现在就一一介绍下. 函数介绍 属性 返回值 函数体 功能 static QThread * QThread::cur ...
- B 小雨的三角形
题目链接:https://ac.nowcoder.com/acm/contest/949/B 思路: 一个找规律题,找到规律就很简单,只剩下代码实现了.规律:第i行去头尾剩下的数的和等于第i-1行去头 ...
- B-Tree索引
翻译自http://dev.mysql.com/doc/refman/5.6/en/index-btree-hash.html 理解B-Tree和Hash的数据结构能够帮助我们预测不同存储引擎下的查询 ...
- hadoop集群搭建(docker)
背景 目前在一家快递公司工作,因项目需要,对大数据平台做个深入的了解.工欲利其器必先利其器,在网上找了许多教程,然后自己搭建一个本地的环境并记录下来,增加一些印象. 环境搭建 1)Ubuntu doc ...
- java面试题 -- 基础
1.抽象和封装的不同点抽象和封装是互补的概念.一方面,抽象关注对象的行为.另一方面,封装关注对象行为的细节.一般是通过隐藏对象内部状态信息做到封装,因此,封装可以看成是用来提供抽象的一种策略.2.重载 ...
- 制作MACOSX 10.9Mavericks安装启动U盘教程
苹果OS X Mavericks发布了,不少朋友又开始制作系统安装U盘了.其实下面介绍的方法与之前介绍的方法可能有些不同,不过原理还是一样的.下面看看具体的操作步骤吧! 1. 首先你需要开启显示隐藏文 ...