ROS中3D机器人建模(四)
一.创建一个7-DOF机械臂机器人
创建一个名为seven_dof_arm.xacro的文件,写入相应的代码,其关节名称如下:
bottom_joint
shoulder_pan_joint
shoulder_pitch_joint
elbow_roll_joint
elbow_pitch_joint
wrist_roll_joint
wrist_pitch_joint
gripper_roll_joint
finger_joint1
finger_joint2
二.解析7-DOF机械臂的xacro模型
我们将在这个机器人上定义10个连杆和9个关节,在机器人夹爪中定义2个连杆和2个关节。
1.使用常量
在xacro中使用常量可以让机器人的描述更简短、更可读。我们定义了每个连杆的角度-弧度换系数、PI值、长度 、高度和宽度:
<xacro:property name="deg_to_rad" value="0.01745329251994329577"/>
<xacro:property name="M_PI" value="3.14159"/>
<xacro:property name="elbow_pitch_len" value="0.22" />
<xacro:property name="elbow_pitch_width" value="0.04" />
<xacro:property name="elbow_pitch_height" value="0.04" />
2.使用宏
在以下代码中定义了宏,避免重复并使代码更加简短。如下:
85 <xacro:macro name="inertial_matrix" params="mass">
86 <inertial>
87 <mass value="${mass}" />
88 <inertia ixx="1.0" ixy="0.0" ixz="0.0" iyy="0.5" iyz="0.0" izz="1. 0" />
89 </inertial>
90 </xacro:macro>
这是惯性矩阵宏的定义,其中我们用mass作为参数。
92 <xacro:macro name="transmission_block" params="joint_name">
93 <transmission name="tran1">
94 <type>transmission_interface/SimpleTransmission</type>
95 <joint name="${joint_name}">
96 <hardwareInterface>hardware_interface/PositionJointInterface</ha rdwareInterface>
97 </joint>
98 <actuator name="motor1">
99 <hardwareInterface>hardware_interface/PositionJointInterface</ha rdwareInterface>
100 <mechanicalReduction>1</mechanicalReduction>
101 </actuator>
102 </transmission>
103 </xacro:macro>
在这段代码中我们可以看到使用transmission(传动)标签的定义。
transmission标签将关节与执行机构相关联。它定义了我们在某一关节中使用的传动类型,马达的类型即参数。
它还定义了我们与ROS控制器通信时使用的硬件接口的类型。
3.包含其他xacro文件
我们可以通过使用xacro : include标签包含传感器的xacro定义来扩展xacro的功能。下面代码片段展示了如何在机器人xacro中包含传感器定义:
<xacro:include filename="$(find mastering_ros_robot_description_pkg)/urd f/sensors/xtion_pro_live.urdf.xacro"/>
在这里我们包含了一个叫做Asus Xtion pro的传感器的xacro定义,当解析xacro文件时,这个定义被展开
使用"$(find mastering_ros_robot_description_pkg)/urd f/sensors/xtion_pro_live.urdf.xacro"/>我们就可以访问传感器的xacro定义,
其中find是查找当前mastering_ros_robot_description_pkg软件包的位置。
4.使用机器人夹爪
机器人夹爪用于抓取和放置物体,夹爪属于简单的连接类型,他有2个关节,每个关节都是滑动关节,以下是一个夹爪关节的joint定义:
440 <joint name="finger_joint1" type="prismatic">
441 <parent link="gripper_roll_link"/>
442 <child link="gripper_finger_link1"/>
443 <origin xyz="0.0 0 0" />
444 <axis xyz="0 1 0" />
445 <limit effort="100" lower="0" upper="0.03" velocity="1.0"/>
446
447
448 <safety_controller k_position="20"
449 k_velocity="20"
450 soft_lower_limit="${-0.15 }"
451 soft_upper_limit="${ 0.0 }"/>
452
453
454 <dynamics damping="50" friction="1"/>
455 </joint>
在这里,夹爪的第一个关节由gripper_roll_link和gripper_finger_link1构成,第二个关节由gripper_roll_link和gripper_finger_link2构成。
连接结构如图所示:

5.在RViz中查看7-DOF机械臂
建立好机器人的模型后,我们可以在RViz中查看设计好的xacro文件,并使用关节状态发布者(joint state publisher)节点控制每个关节,使用机器人状态发布者(robot state publisher)节点发布机器人状态。
可以使用名为view_arm.launch的启动文件去启动机器人仿真,代码如下:
1 <launch>
2 <arg name="model" />
3 <!-- Parsing xacro and setting robot_description parameter -->
4
5 <param name="robot_description" command="$(find xacro)/xacro --inorder $(find mastering_ros_robot_description_pkg)/urdf/seven_dof_arm.xacro" />
6
7
8 <!-- Setting gui parameter to true for display joint slider -->
9 <param name="use_gui" value="true"/>
10
11 <!-- Starting Joint state publisher node which will publish the joint v alues -->
12 <node name="joint_state_publisher" pkg="joint_state_publisher" type="jo int_state_publisher" />
13
14 <!-- Starting robot state publish which will publish tf -->
15 <node name="robot_state_publisher" pkg="robot_state_publisher" type="st ate_publisher" />
16
17 <!-- Launch visualization in rviz -->
18 <node name="rviz" pkg="rviz" type="rviz" args="-d $(find mastering_ros_ robot_description_pkg)/urdf.rviz" required="true" />
19
20 </launch>
使用以下命令启动URDF:
$ roslaunch mastering_ros_robot_description_pkg view_arm.launch
该机器人将在RViz上显示,且同时打开了关节状态发布者(joint state publisher)的GUI
如图所示:
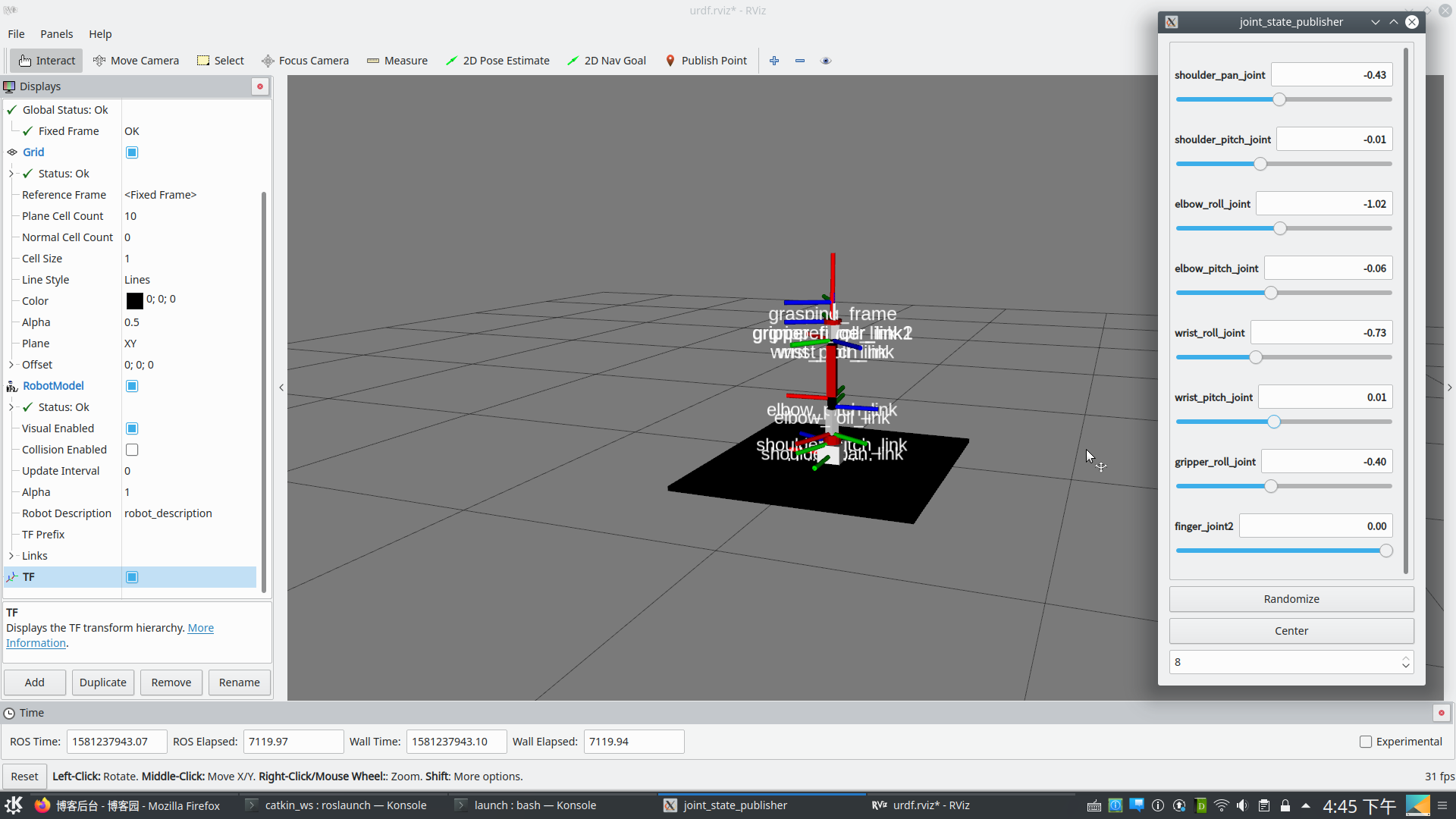
理解关节状态发布者
关节状态发布者(joint state publisher)是一个ROS软件包,常用于与机器人的每个关节进行交互。该软件包包含joint_state_publisher节点,该节点将从URDF模型中找到非固定关节,
并以sersor_msgs/JointState的消息格式发布每一个关节的关节状态值。
在前面的启动文件view_arm.launsh中,我们启动了joint_state_publisher节点并将一个命名为use_gui的参数设置为true,如下所示:
9 <param name="use_gui" value="true"/>
10
11 <!-- Starting Joint state publisher node which will publish the joint values -->
12 <node name="joint_state_publisher" pkg="joint_state_publisher" type="joint_st ate_publisher" />
如果我们将use_gui设置为true,那么joint_state_publisher节点将显示一个基于滑动条控件的窗口来控制每个关节。
关节的下限位值和上限位值将取自joint标签内的limit标签相关联的上下限位数据。
理解机器人状态发布者
机器人状态发布者(robot state publisher)软件包可以将机器人的状态发布到tf,此软件包订阅了机器人的关节状态,使用URDF模型的运动表示来发布
每个连杆的3D姿态,我们可以在启动文件中使用以下代码来实现机器人状态发布者节点:
14 <!-- Starting robot state publish which will publish tf -->
15 <node name="robot_state_publisher" pkg="robot_state_publisher" type="stat e_publisher" />
在前面的启动文件view_arm.launch中,我们启动了这个节点来发布机械臂的tf,我们可以通过点击RViz上的tf选项可视化机器人的变换。
ROS中3D机器人建模(四)的更多相关文章
- ROS中3D机器人建模(五)
一.创建一个差速驱动移动机器人模型 前面我们已经创建了一个7-DOF机械臂机器人模型,接下来我们将创建一个差速机器人模型,差速轮式机器人在机器人底盘的两端安装两个轮子, 整个底盘由一个或两个脚轮支撑. ...
- ROS中3D机器人建模(一)
一,机器人建模的ROS软件包 *urdf : 机器人建模最重要的ros软件包是urdf软件包.这个软件包包含一个用于统一机器人描述格式(URDF)的C++解析器,它是一个表示机器人模型的XML文件,还 ...
- ROS中测试机器人里程计信息
在移动机器人建图和导航过程中,提供相对准确的里程计信息非常关键,是后续很多工作的基础,因此需要对其进行测试保证没有严重的错误或偏差.实际中最可能发生错误的地方在于机器人运动学公式有误,或者正负号不对, ...
- ROS中的3D建模机器人(三)
一.利用xacro理解机器人建模 当我们创建复杂的机器人模型时,URDF的灵活性将会降低,URDF缺少的主要特性是简单的.可重用性,模块化和可编程性. URDF是一个单独的文件我们不能在它里面包含其他 ...
- ROS中的3D机器人建模(二)
一,创建我们的第一个URDF模型 我们设计的第一个机器人模型是pan-and-tilt机械结构,代码如下 pan_tilt.urdf: 1 <?xml version="1.0&quo ...
- 机器人操作系统(ROS)教程22:ROS的3D可视化工具—rviz
rviz是ROS中的一个3D可视化工具,有了它就可以把你用代码建的机器人模型转化为可视的3D模型. 首先需要安装: rosdep install rviz 然后编译rviz: rosmake rviz ...
- ROS_Kinetic_07 ROS中机器人三维物理引擎高保真仿真利器gazebo 7.0
ROS_Kinetic_07 ROS中机器人三维物理引擎高保真仿真利器gazebo 7.0 ROS kinetic中的gazebo版本是7.0,有很多新的特性. 首先,启动gazebo: ~$ gaz ...
- ROS中发布激光扫描消息
激光雷达工作时会先在当前位置发出激光并接收反射光束,解析得到距离信息,而后激光发射器会转过一个角度分辨率对应的角度再次重复这个过程.限于物理及机械方面的限制,激光雷达通常会有一部分“盲区”.使用激光雷 ...
- ROS学习笔记十二:使用gazebo在ROS中仿真
想要在ROS系统中对我们的机器人进行仿真,需要使用gazebo. gazebo是一种适用于复杂室内多机器人和室外环境的仿真环境.它能够在三维环境中对多个机器人.传感器及物体进行仿真,产生实际传感器反馈 ...
随机推荐
- $SCOI2009\ windy$数 数位$dp$
\(Sol\) 数位\(dp\)常规套路题. \(dp[i][j]\)表示从低位到高位填到第\(i\)位且第\(i\)位的数字为\(j\)的方案数.答案就是\(sol(r)-sol(l+1).\)这里 ...
- Python基础入门必备知识
1 标识符标识符是编程时使用的名字,用于给变量.函数.语句块等命名,Python 中标识符由字母.数字.下划线组成,不能以数字开头,区分大小写. 以下划线开头的标识符有特殊含义,单下划线开头的标识符, ...
- Flink入门(五)——DataSet Api编程指南
Apache Flink Apache Flink 是一个兼顾高吞吐.低延迟.高性能的分布式处理框架.在实时计算崛起的今天,Flink正在飞速发展.由于性能的优势和兼顾批处理,流处理的特性,Flink ...
- 「2015南阳CCPC D」金砖 解题报告
金砖 Problem 有一个长度为L的板凳,可以放一排金砖,金砖不能重叠.特别的,摆放的金砖可以超出板凳,前提是必须保证该金砖不会掉下去,即该金砖的重心必须在板凳上. 每块金砖都一个长度和价值,且金砖 ...
- notepad++中cmd运行中文乱码?
notepad++中有中文内容时,cmd运行时中文显示乱码,如何处理? 设置-->首选项-->新建-->选择ANSI编码(注意现在的文件不会被转换,要重新把代码拷入修建的文件中才可以 ...
- 大量SQL的解决方案——sdmap
大量SQL的解决方案--sdmap 最近看到群里面经常讨论大型应用中SQL的管理办法,有人说用EF/EF Core,但很多人不信任它生成SQL的语句:有人说用Dapper,但将SQL写到代码中有些人觉 ...
- 简简单单之Linux命令入门
show me the code and talk to me,做的出来更要说的明白 GitHub 项目JavaHouse同步收录 我是布尔bl,你的支持是我分享的动力! 引入 作为一名合格的后端开发 ...
- 【转】常见Java面试题 – 第四部分:迭代(iteration)和递归(recursion)
ImportNew注: 本文是ImportNew编译整理的Java面试题系列文章之一.你可以从这里查看全部的Java面试系列. Q.请写一段代码来计算给定文本内字符“A”的个数.分别用迭代和递归两种方 ...
- git版本管理工具(二)
1.查看历史版本 ·git log ·git reflog 2.版本回退 ·git reset --hard HEAD^(HEAD代表当前版本) ·HEAD^代表回退到上一个版本 以此类推 ·HEAD ...
- 洛谷 P2746 [USACO5.3]校园网Network of Schools schlnet Tarjan强连通分量
schlnet ★★★ 输入文件:schlnet.in 输出文件:schlnet.out 简单对比时间限制:1 s 内存限制:128 MB 描述 一些学校连入一个电脑网络.那些学校已订 ...