【文献07】基于MPC的WMR点镇定-极坐标系下和轨迹跟踪
参考:
Kuhne F , Lages W , Silva J D . Point stabilization of mobile robots with nonlinear model predictive control[J]. 2005.
Point Stabilization for Wheeled Mobile Robots Using Model Predictive Control
Gu D , Hu H . Receding Horizon tracking control of wheeled mobile robots[J]. IEEE Transactions on Control Systems Technology, 2006, 14(4):743-749.
https://drive.wps.cn/mine/28717934032
【1】Kuhne F , Lages W , Silva J D . Point stabilization of mobile robots with nonlinear model predictive control[J]. 2005.
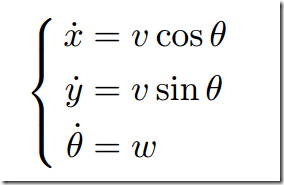
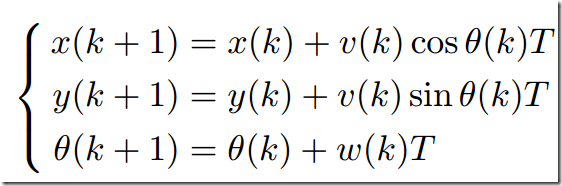
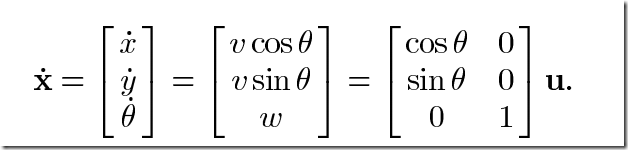
运动学模型

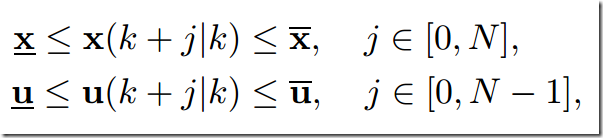
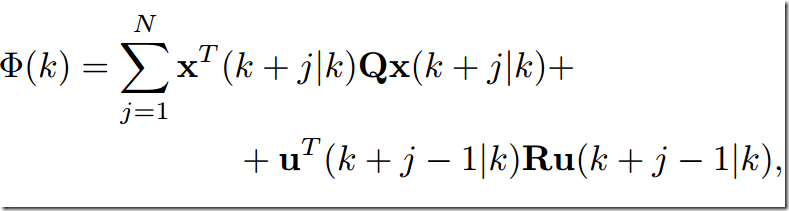
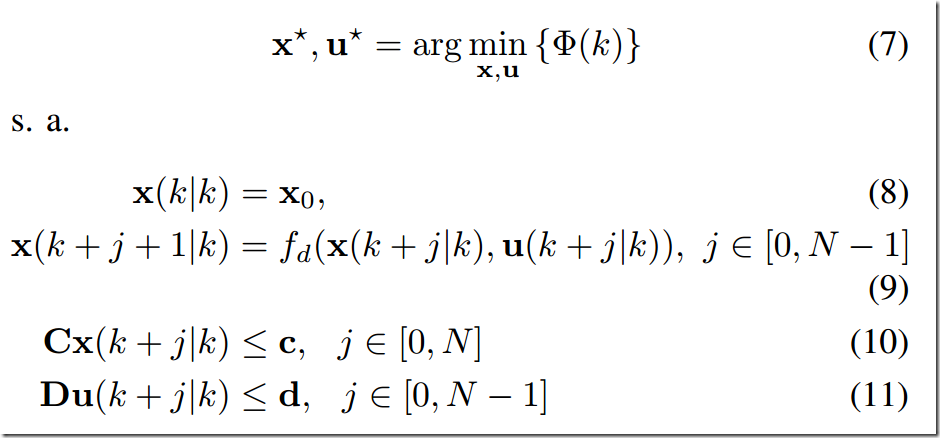
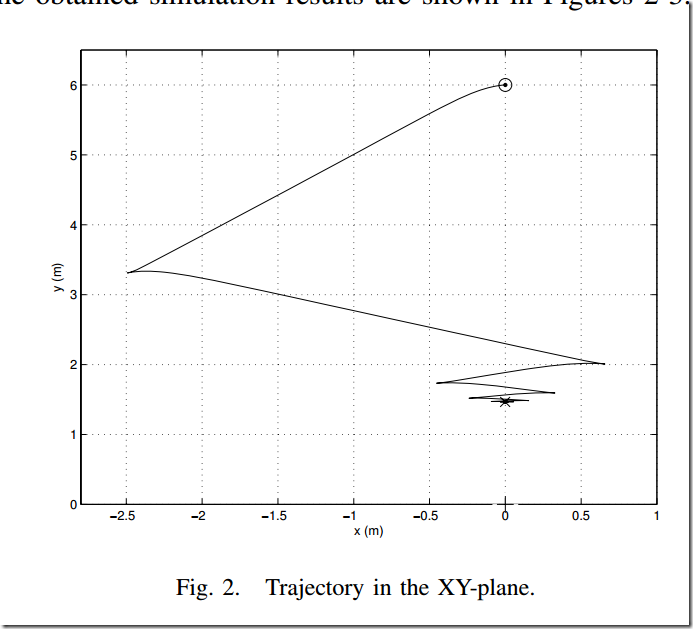
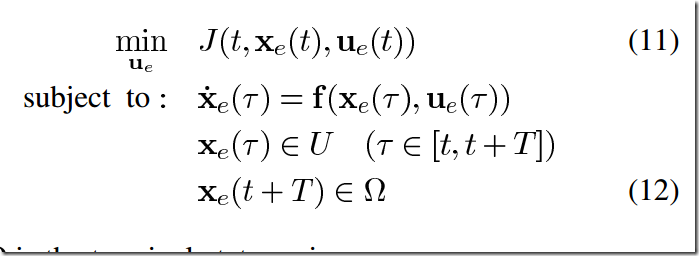
MPC控制-无终端项
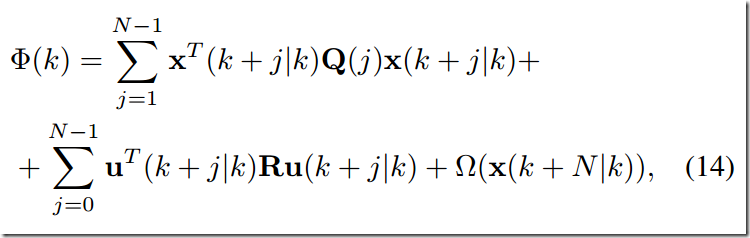
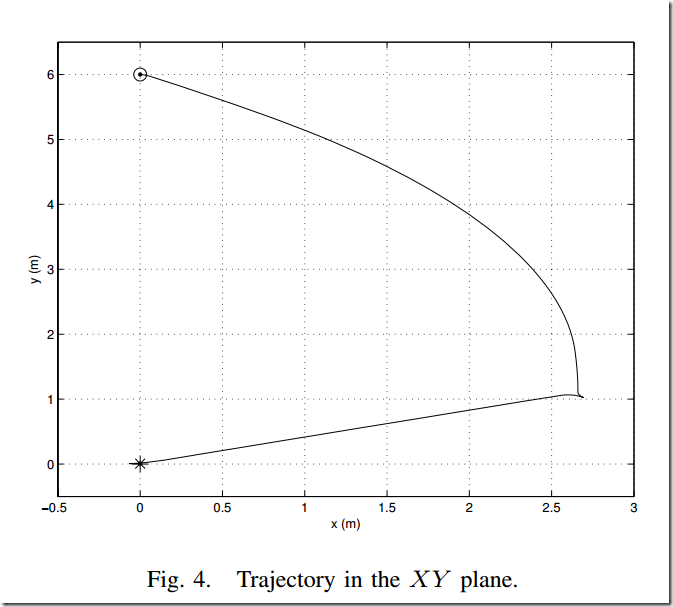
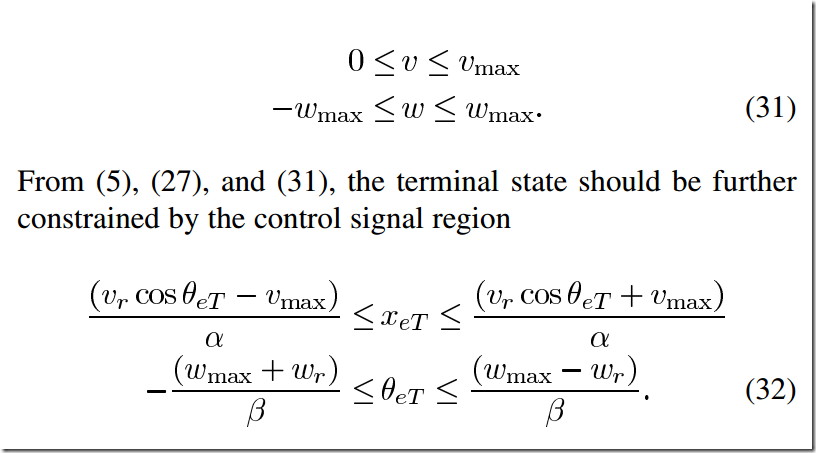
MPC控制-加入终端项
MPC控制-极坐标系下

【2】Point Stabilization for Wheeled Mobile Robots Using Mode Predictive Control

【3】Gu D , Hu H . Receding Horizon tracking control of wheeled mobile robots[J]. IEEE Transactions on Control Systems Technology, 2006, 14(4):743-749.



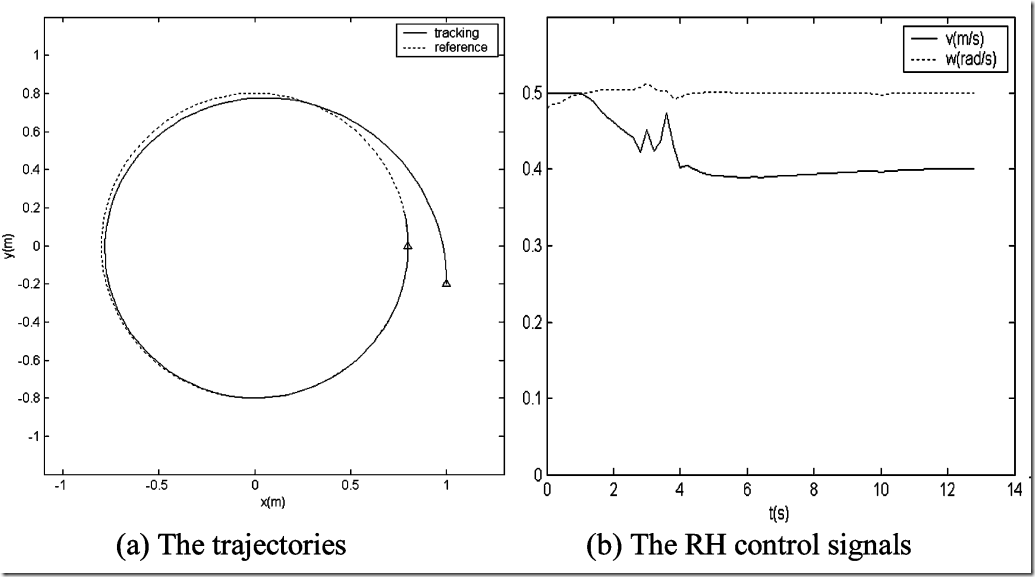
圆形仿真
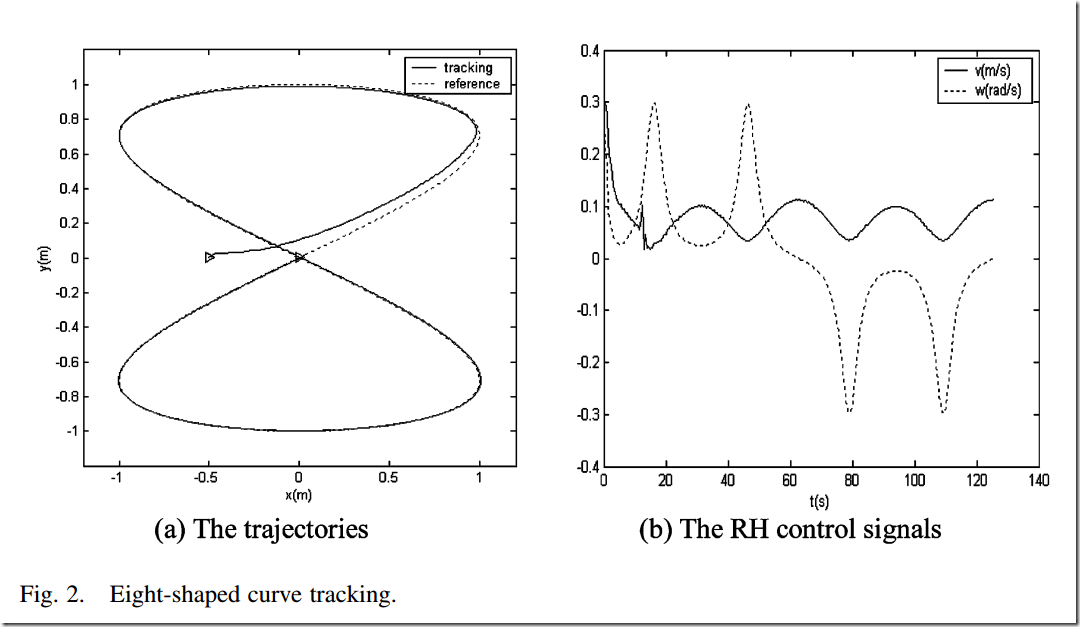
8字形
平行泊车

【文献07】基于MPC的WMR点镇定-极坐标系下和轨迹跟踪的更多相关文章
- 李飞飞团队最新论文:基于anchor关键点的类别级物体6D位姿跟踪
6-PACK: Category-level 6D Pose Tracker with Anchor-Based Keypoints 论文地址: 6-PACK: Category-level 6D P ...
- 【GWAS文献】基于GWAS与群体进化分析挖掘大豆相关基因
Resequencing 302 wild and cultivated accessions identifies genes related to domestication and improv ...
- 《精通并发与Netty》学习笔记(07 - 基于Thrift实现Java与Python的RPC调用)
上节我们介绍了基于Thrift实现java与java的RPC调用,本节我们基于Thrift实现Java与Python的RPC调用 首先,修改data.thirft文件,将命名空间由java改为py n ...
- Spring框架学习07——基于传统代理类的AOP实现
在Spring中默认使用JDK动态代理实现AOP编程,使用org.springframework.aop.framework.ProxyFactoryBean创建代理是Spring AOP 实现的最基 ...
- 07.基于IDEA+Spring+Maven搭建测试项目--logback.xml配置
<?xml version="1.0" encoding="UTF-8"?> <configuration> <!-- 控制台日志 ...
- 基于MPC算法的车辆多目标自适应巡航控制系统研究_荆亚杰
- 基于单细胞测序数据构建细胞状态转换轨迹(cell trajectory)方法总结
细胞状态转换轨迹构建示意图(Trapnell et al. Nature Biotechnology, 2014) 在各种生物系统中,细胞都会展现出一系列的不同状态(如基因表达的动态变化等),这些状态 ...
- 吴裕雄--天生自然 神经网络人工智能项目:基于深度学习TENSORFLOW框架的图像分类与目标跟踪报告(续四)
2. 神经网络的搭建以及迁移学习的测试 7.项目总结 通过本次水果图片卷积池化全连接试验分类项目的实践,我对卷积.池化.全连接等相关的理论的理解更加全面和清晰了.试验主要采用python高级编程语言的 ...
- 【文献08】多移动机器人轨迹跟踪控制系统设计与实现-运动学ADRC控制
参考: 陈俊, 俞立, 滕游. 多移动机器人轨迹跟踪控制系统设计与实现[J]. 计算机测量与控制, 2017(7). https://drive.wps.cn/view/p/28819052019?f ...
随机推荐
- Codeforces 1136E - Nastya Hasn't Written a Legend - [线段树+二分]
题目链接:https://codeforces.com/problemset/problem/1136/E 题意: 给出一个 $a[1 \sim n]$,以及一个 $k[1 \sim (n-1)]$, ...
- PHP计算年龄
<?php $birthday = strtotime('1992-10-03'); $time = time();//2019-03-14; function datediffage($bir ...
- Python_tkinter(1)_窗口创建与布局
环境:Python 3.7.2 1. 窗口基本创建(窗口标题.窗口大小) import tkinter from tkinter import * # 初始化Tk() root = Tk() # 设置 ...
- 12.1-uC/OS-III调度的内部实现
1.调度的内部实现通过这两个函数完成调度功能: OSSched()和OSIntExit().OSSched()在任务级被调用, OSIntExit()在中断级被调用.这两个函数都在OS_CORE.C中 ...
- Python3学习之路~5.12 hashlib & hmac & md5 & sha模块
hashlib模块用于加密相关的操作,3.x里代替了md5模块和sha模块,主要提供 SHA1, SHA224, SHA256, SHA384, SHA512 ,MD5 算法 import md5 h ...
- VS2015 新建 ASP.NET Web应用程序, 此模板尝试加载程序集‘Microsoft.VisualStudio.Web.Project’, 解决方案
下载并安装Azure的SDK即可:
- egg.js基础入门
之前一直使用koa, 刚刚接触egg, 做了一些入门的笔记 准备工作 1 首先安装脚手架,,并创建项目. $ npm i egg-init -g $ egg-init egg-demo --type ...
- css td hover 选择器无效
最近在写一个日历控件,控件中使用了table 来显示日期.在css 文件中利用 td:hover 设置td 背景色时 一直没起作用.上百度google 了一下,网上大部分人遇到的都是在td:hover ...
- Centos7.2 Install subversion server
l 安装svn yum install subversion l 查看svn版本 svnserve --version l 创建svn版本库目录 mkdir -p /projects/ ...
- python 第四阶段 学习记录之----异步
异步: 知识情况: 1.多线程, 多线程使用场景 1.IO操作不占CPU,读写数据(网络中.系统中) 2.计算占CPU, 3.上下文切换不占CPU.它消耗资源 python多线程 不适合CPU密集型的 ...